
技术摘要:
本发明提供了一种融合时空信息的传感器缺失值的填充方法,包括:输入N条历史数据X以及M条有缺失的数据Xmissing;其中M,N大于输入时序长度T;填充阈值η,将历史数据输入训练好的LSTM‑AES之后,η=std(X‑X');得到已训练模型LSTM‑AES;已修复数据Xrepaired;将原数 全部
背景技术:
之前,缺失值填充方法都只利用了数据空间上的联系,而并没有使用时序信息。它 们在数据存在多维缺失的时候表现不好,在存在块缺失的情况下甚至无法使用。此外,之前 的工作都首先假设已知缺失值的位置,针对单一缺失类型进行建模。但是缺失值的位置在 实时的系统中并不是已知的。在这种情况下,为了能够实时处理各种类型的缺失,所需训练 的模型数量与传感器数量成指数增长,不利于缺失值填充方法的实际应用。
技术实现要素:
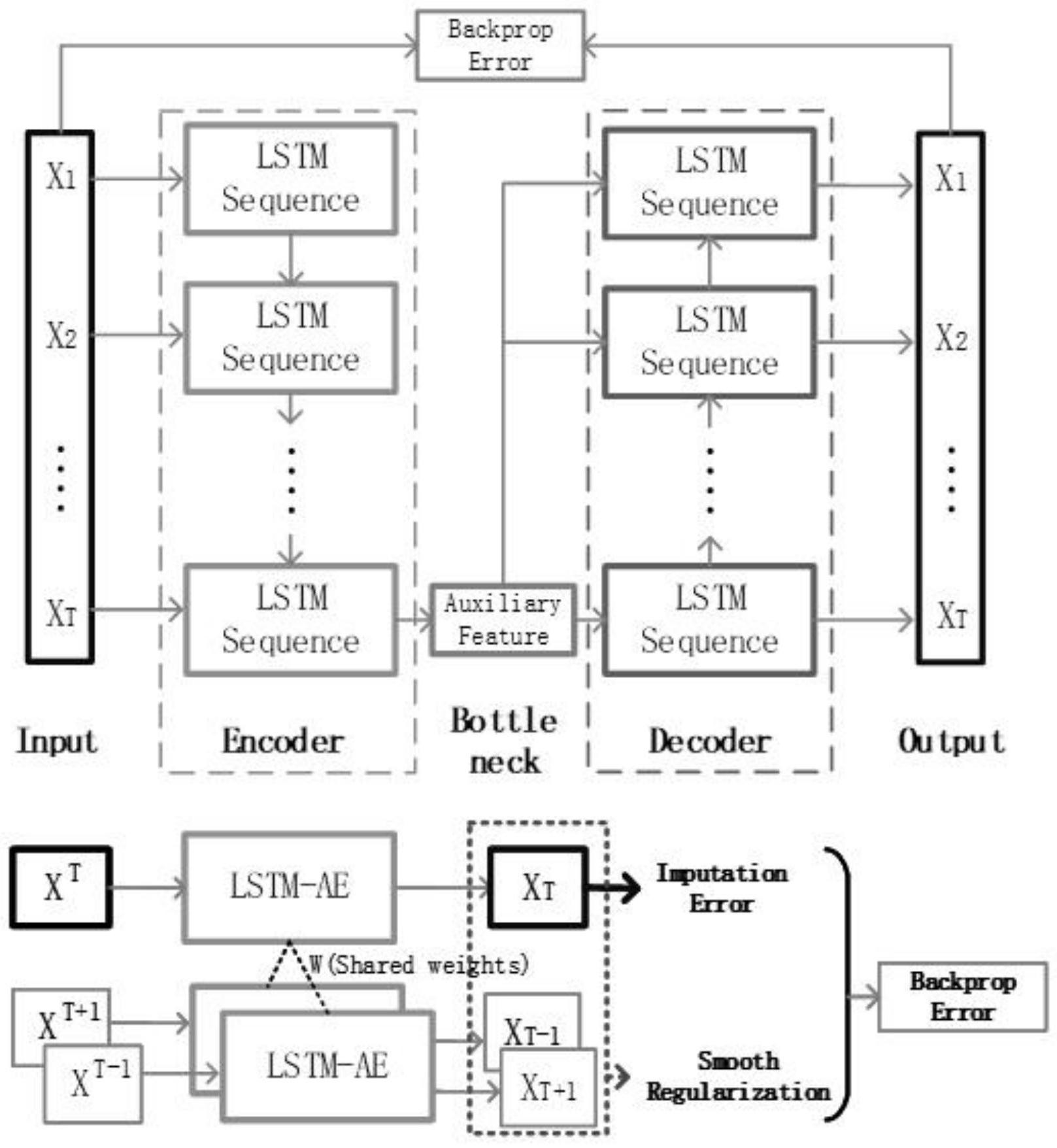
为了解决上述问题,本发明提供了一种融合时空信息的传感器缺失值的填充方 法,结合了深度自动编码机和长短时神经网络。 本发明提供了一种融合时空信息的传感器缺失值的填充方法,包括: 输入N条历史数据X以及M条有缺失的数据Xmissing;其中M,N大于输入时序长度T; 填充阈值η,将历史数据输入训练好的LSTM-AES之后,η=std(X-X'),其中X为测试 数据,X'为模型输出数据,std为标准差;得到已训练模型LSTM-AE ;已修复数据XrepairedS ; 将原数据划分成时序数据集; 初始化LSTM-AES:使用Tensorflow深度学习框架,构建多层自编码神经网络,神经 元类型使用LSTM,其中第一层神经元数目与传感器数据一致,最中间编码层神经元数目为 使用主成分分析方法对历史数据X进行降维后的信息保持率超过99%时的最小维度;然后 使用Tensorflow进行网络初始化; 使用神经网络常用的反向传播算法更新LSTM-AES的权值W; 进行缺失值填充。 在上述方法中,其中,在初始化LSTM-AES并且在更新权值W之前,还包括计算重构 误差: 其中 分别是XjXj中第T个时刻的传感器 数据。 在上述方法中,其中,在初始化LSTM-AES并且在更新权值W之前,还包括计算正则 项误差: 其中 分别表示Xj -1',Xj',Xj 1'中第T个时刻的数据。 在上述方法中,其中,在初始化LSTM-AES并且在更新权值W之前,还包括计算损失 3 CN 111597175 A 说 明 书 2/4 页 项: 其中 是求解偏导数,整个神经网 络视为一个关于权值W,偏置项b以及输入XT的函数,用hW,b(XT)指代,θ是正则化参数。 本发明的优势在于能够同时挖掘数据中的时空信息用于缺失值填充,大大提升了 在多维缺失时的填充精度。而且,由于自动编码机同时恢复所有的数据,因而可以不用针对 不同缺失类型训练模型,大大的降低了模型训练复杂度和对数据的要求。同时引入了光滑 性正则,进一步提升了模型的预测精度和鲁棒性。而共享权值策略的使用使得模型能够更 加快速的收敛,降低算法的训练复杂度。 缺失值的存在是许多大型设备特别是动力装置的安全稳定运行的巨大隐患,而现 有的方法的精度和鲁棒性使得它们并不能够实际应用于缺失值填充的实际应用中,本发明 所提供的算法在实际运行燃气轮机数据上能够对经典算法提升60%以上精确度,并且在多 维缺失情况下也具有较强的鲁棒性。 本发明可广泛应用于大型动力装置健康管理系统中,以实现健康管理系统的稳定 运行。 附图说明 图1示出了LSTM-AE及LSTM-AEs的训练流程图。











