
技术摘要:
本发明公开了一种基于反射镜及单目视觉的三维形貌测量方法,包括以下步骤:预先设计一种红外立体标靶,靶标上布置有若干个红外LED发光二极管;对单目相机进行标定,获取相机内参与畸变系数矩阵;根据各系统坐标系的转换关系和PnP算法解算出线激光扫描仪在相机坐标系下 全部
背景技术:
随着智能化的发展,设备、零件需要更高的制造精度,同时也需要更高精度、高效 率的检测手段。数字孪生等技术也要求获取物体的三维形貌,而随着激光、结构光等非接触 式测量设备的发展及广泛应用,更高效更精确的获取物体表面三维形貌成为可能。基于点 云的三维重建技术,影响精度的关键在点云拼接,点云拼接过程会产生误差的累积,尺寸越 大,拼接次数越多,误差越大。现在常规的三维扫描方法为手持式或固定式,效率低且难以 扫描大尺寸物体,尤其对于人难以到达的、甚至需要进入内部测量的情况,受光照和活动空 间等因素影响,如何获取三维点云数据成为难题,也难以进行高精度的点云拼接。因此要实 现大尺寸物体及狭长空间的三维重建,要依托数字化测量设备,实现数字化高精度的测量, 提高拼接精度,近年来数字化测量发展迅速,尤其是在航空制造产业中应用更加广泛。而对 于某些不易测量的部分,有时需要借助平面反射镜来辅助测量。 综上,现有三维重建方法对于光线无法跟踪情形下难以进行有效的点云数据获取 及后续的重建工作。
技术实现要素:
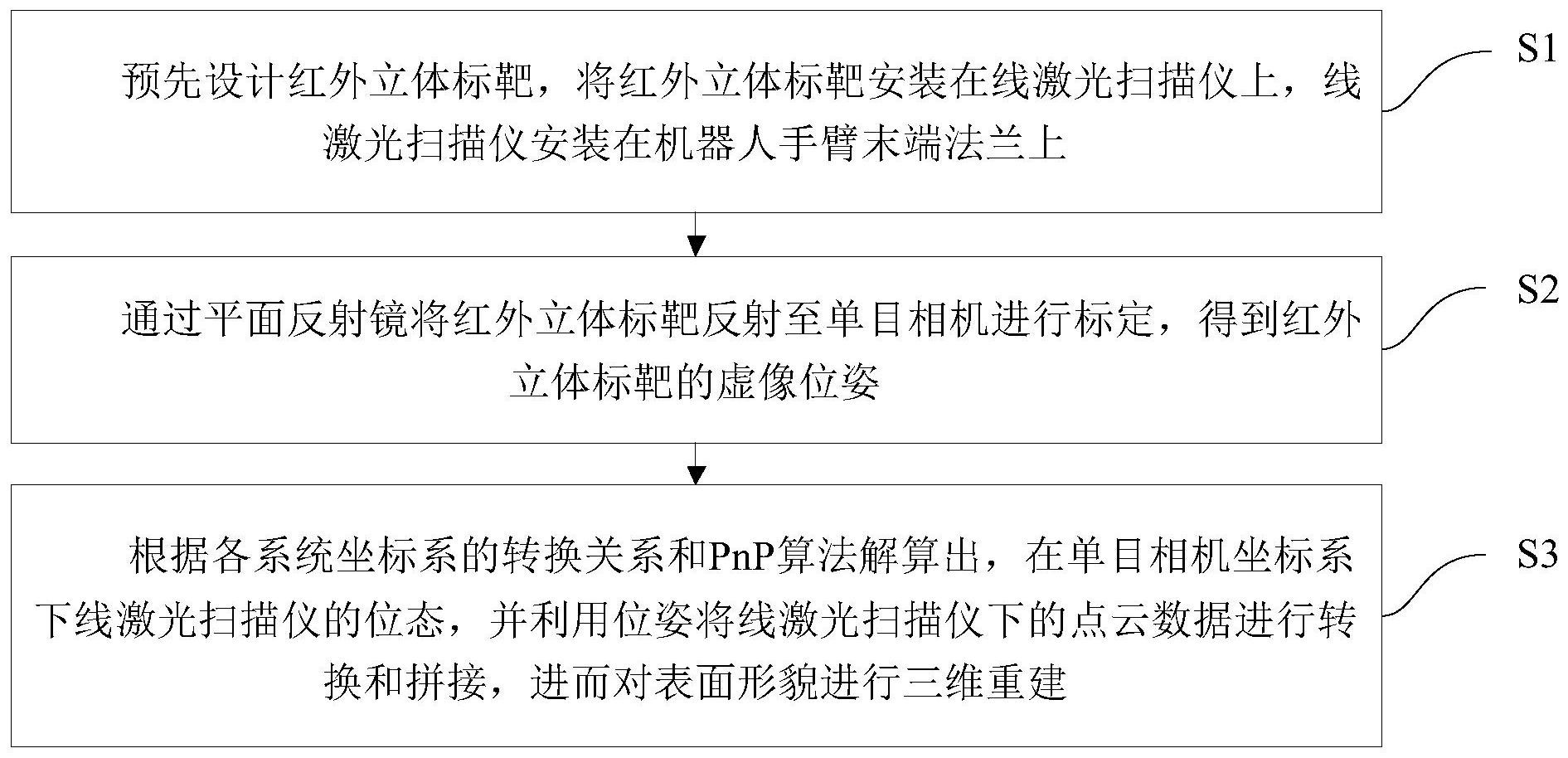
本发明旨在至少在一定程度上解决相关技术中的技术问题之一。 为此,本发明的目的在于提出一种基于反射镜及单目视觉的三维形貌测量方法。 该方法能便捷有效的完成视觉定位时存在的光路被遮挡情形下的测量及三维重建。 为达到上述目的,本发明实施例提出了基于反射镜及单目视觉的三维形貌测量方 法,包括以下步骤:步骤S1,预先设计红外立体标靶,将所述红外立体标靶安装在线激光扫 描仪上,所述线激光扫描仪安装在机器人手臂末端法兰上;步骤S2,通过平面反射镜将所述 红外立体标靶反射至单目相机进行标定,得到所述红外立体标靶的虚像位姿;步骤S3,根据 各系统坐标系的转换关系和PnP算法解算出,在单目相机坐标系下所述线激光扫描仪的位 态,并利用所述位姿将所述线激光扫描仪下的点云数据进行转换和拼接,进而对表面形貌 进行三维重建。 本发明实施例的基于反射镜及单目视觉的三维形貌测量方法,通过应用单目视觉 实时测量线激光扫描仪的位置,获取的姿态量可以用于后期的三维重建,基于反射测量原 理,借助一块高反射率的平面反射镜能够解决光线无法跟踪的复杂场景下的测量,使用单 目视觉进行定位而不需要高精密导轨等复杂设备来提供点云的y方向坐标,反射测量的加 入可以对常规方法难以测量的复杂场景进行测量,解决了无法跟踪光线时的测量难题。 另外,根据本发明上述实施例的基于反射镜及单目视觉的三维形貌测量方法还可 以具有以下附加的技术特征: 4 CN 111578860 A 说 明 书 2/8 页 进一步地,在本发明的一个实施例中,所述红外立体标靶包括法兰盘、测头安装 板、散热背板、碳纤维面板和若干控制点,其中,所述法兰盘通过若干螺纹与所述测头安装 板连接,所述散热背板通过所述若干螺纹分别与所述测头安装板和所述碳纤维面板连接, 所述若干控制点采用胶接方式安装在所述碳纤维面板上。 进一步地,在本发明的一个实施例中,所述红外立体标靶包含若干个控制点,其 中,所述若干控制点均采用主动式光源红外LED发光二极管,对称分布在所述碳纤维面板 上。 进一步地,在本发明的一个实施例中,所述步骤S2进一步包括:利用张正友标定法 对所述单目相机进行标定;在所述单目相机和所述线激光扫描仪之间添加所述平面反射 镜,光线通过所述平面放射镜将所述红外立体标靶反射至所述单目相机视野内,获取所述 平面放射镜中所述红外立体标靶的虚像位姿。 进一步地,在本发明的一个实施例中,所述步骤S3进一步包括:利用PnP算法求解 出单目相机坐标系下的所述线激光扫描仪的位姿;根据所述线激光扫描仪的位姿位姿将所 述线激光扫描仪扫描获取的若干点云进行坐标转换,映射到所述单目相机坐标系下;将所 述单目相机坐标系的点云进行镜像,得到实际测量目标的点云信息;通过ICP算法和所述实 际测量目标的点云信息,对所述若干点云进行配准拼接,获得完整实际测量目标点云数据; 根据所述完整实际测量目标点云数据对表面形貌进行三维重建。 进一步地,在本发明的一个实施例中,所述线激光扫描仪的位姿包括所述线激光 扫描仪的空间位置坐标(x,y,z)和三个旋转角(α,β,γ)。 进一步地,在本发明的一个实施例中,所述若干点云转换到所述单目相机坐标系 下的转换关系为: Ps=R×Pb T 其中,PS为点云在所述线激光扫描仪下的坐标,Pb为点云在所述单目相机坐标系下 的坐标,R为所述单目相机坐标系相对红外立体标靶坐标系的旋转矩阵,T为所述单目相机 坐标系相对所述红外立体标靶坐标系的平移矩阵。 进一步地,在本发明的一个实施例中,从所述线激光扫描仪到所述单目相机坐标 系采用欧拉角的Z轴、Y轴、X轴旋转顺序转换三次。 本发明附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变 得明显,或通过本发明的实践了解到。 附图说明 本发明上述的和/或附加的方面和优点从下面结合附图对实施例的描述中将变得 明显和容易理解,其中: 图1为根据本发明一个实施例的基于反射镜及单目视觉的三维形貌测量方法的流 程图; 图2为根据本发明一个实施例的反射测量示意图; 图3为根据本发明一个实施例的红外立体标靶示意图; 图4为根据本发明一个实施例的红外LED光标示意图; 图5为根据本发明一个实施例的步骤S3执行的具体流程图; 5 CN 111578860 A 说 明 书 3/8 页 图6为根据本发明一个实施例的步骤S4中的人机交互界面示意图。 附图标记说明: 1-单目相机、2-平面反射镜、3-墙壁、4-红外立体标靶、5-红外立体标靶(镜像)、6- 法兰盘、7-测头安装板、8-散热背板、9-碳纤维面板和10-红外LED发光二极管。











