
技术摘要:
本发明涉及用于气压控制主动式筒子架的控制单元,具有连接压缩空气供应装置的压缩空气入口、操作至少单向作用的缸的工作空气出口、安置在压缩空气入口与工作空气出口之间的阀单元和用于打开阀单元以引发缸的行程运动的操作件。为提供用于主动式筒子架的气压控制的控制 全部
背景技术:
筒子架的各种各样的设计由现有技术公开了。在此,筒子架通常被用在纺织加工 机如纺纱机或加捻机尤其是捻线机中,以提供至少一个优选多个喂给筒子。为此,筒子架通 常被定位在捻线机的一个或多个工位之上或之后。为了能更好到达筒子架以便更换喂给筒 子,筒子架通常可以借助摆臂旋转到适于操作位置。接着,筒子架必须又被置入难以接近的 使用高位,以便节省空间且获得更好的纺织加工机余部的可接近性。这通常以气压方式实 现,尤其借助缸,在这里,也知道了单纯的机械解决方案和/或手动解决方案以及液压解决 方案。 在此,从现有技术中知道的、可通过气压旋转的筒子架通过控制阀上的键钮被操 作,其中操作者必须在上摆运动的整个期间保持按压键钮,直到筒子架到达稳定的最终位 置。通常,可通过气压旋转的筒子架具有单向作用的缸,从而筒子架的上摆运动手动进行。 在此,空气在缸或其活塞腔内压缩,从而操作者可以从筒子架的约20°-30°的转动角度(依 据筒子装载量)起放开筒子架且不必进一步控制。进一步向下运动随后朝向排气阻尼压力 垫自动进行,直至进入最终低位。 已由出版物EP1357209A2公开了一种纺织机用筒子架,其借助铰接四连杆可转动 安装在一个安置于纺织机机架上的形成四连杆的固定件的支座上并且借助在一侧铰接在 支座上且在另一侧铰接在其中一个活动的四连杆件上的缸可以从装载低位转动到工作高 位,在这里,为了使筒子架从工作位置转动到装载位置,缸是可在两侧接受压缩空气的缸。
技术实现要素:
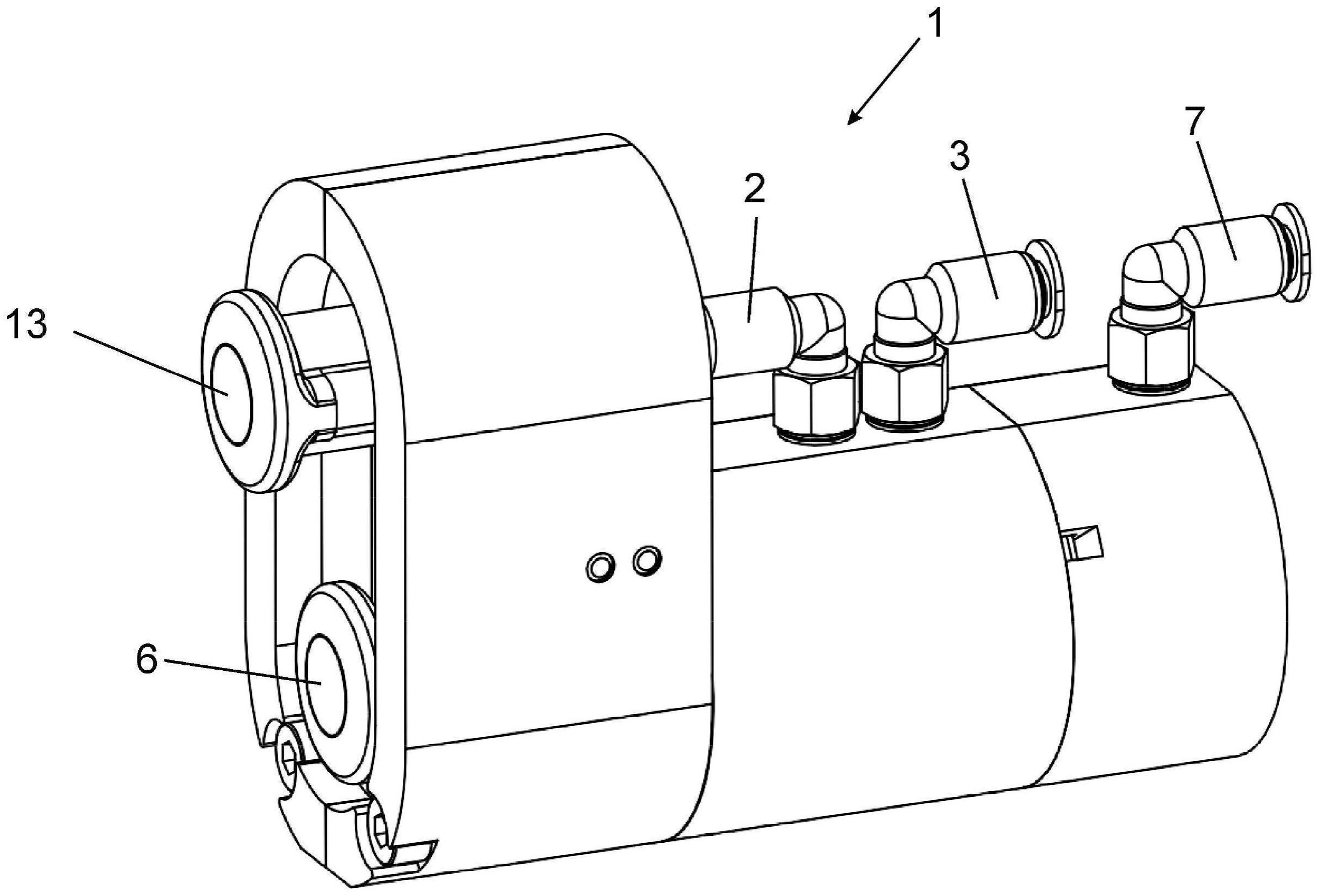
本发明基于以下任务,提供用于气压控制缸的控制单元、用于纺织加工机的筒子 架以及用于缸的主动气压运动的方法,其中该筒子架具有特别简单的借助控制单元的控 制,从而操作者能更简单、快速且可靠地使用该筒子架,另外,筒子架被保护以免于误操作 损伤。 根据本发明,该任务通过一种控制单元、一种筒子架以及一种用于使筒子架运动 的方法完成。 根据本发明的用于气压控制缸、尤其是纺织加工机或捻线机的主动式筒子架的控 制单元具有用于将压缩空气供应装置连接至控制装置的压缩空气入口、用于操作至少单向 4 CN 111594494 A 说 明 书 2/10 页 作用的缸的工作空气出口、在压缩空气入口和工作空气出口之间设置的或作用的阀单元以 及用于借助连接于工作空气出口的缸打开阀单元以引发缸尤其是筒子架的行程运动的操 作件。在此如此构成该控制单元,即,获得自持阀功能,此时在该操作件的仅一次性操作和/ 或短暂操作时执行所述缸的行程运动。还规定了该控制单元可如此连接至该缸的最终位置 传感器,即,在最终位置传感器启用时该阀单元被关闭和/或连接至工作空气出口的缸在到 达最终位置之时或之后自动变为无压力。 根据本发明的用于纺织加工机、尤其是捻线机的筒子架具有根据本发明的控制单 元以及至少单向作用的用于在纺纺织加工机上执行筒子架行程运动的缸,其中该控制单元 和/或缸如此构成,即该缸在到达行程运动的最终位置之时或之后自动变为无压力。 根据本发明的用于缸、尤其是纺织加工机或捻线机的筒子架的主动气压运动尤其 是抬起的方法作为方法步骤首先包括操作控制单元尤其是本发明的控制单元的操作件,由 此该控制单元的设置在压缩空气入口和工作空气出口之间的阀单元至少一直打开,从而缸 的运动且尤其是筒子架的行程运动借助连接至工作空气出口的至少单向作用的缸被完全 执行。接着,随后的方法步骤是用控制单元监测缸的运动,在这里,在控制单元的传感器空 气入口处升高压力和/或超出压力阈值时关闭该阀单元,和/或连接于工作空气出口的缸在 到达最终位置之时或之后自动变为无压力。 在本发明的范围内,发明人做到了新颖的特殊控制单元,其具有新的阀单元作为 用于新的特殊缸的控制阀。在此,本发明允许特别简单的运动控制,其单纯以气压来进行。 另外,因为二进制操作原理,操作者只须短暂按压操作件以引发行程运动,尤其因为未完全 进行行程运动所引起的操作失误的危险被显著降低或甚至排除。操作者在行程运动中不必 在整个运动时间保持按压操作件还导致了更快速的可操作性和相应较短的操作时间以及 更高的工作安全性,因为操作者在该操作件的操作之后可以处于距旋转的筒子架的安全距 离。另外,由于所述缸在到达最终位置时变为无压力,故避免压力长期加载,由此可采用更 廉价的缸,并且还可减轻磨损且进而显著缩短由缺陷或维修决定的停机时间。最后,根据本 发明的控制单元允许明显更紧凑的结构。 该控制单元原则上可以是任何部件或任何部件组,其中该控制单元总是设置用于 气压控制至少一个缸。优选地,该控制单元是一个紧凑的或整体的单元,其组成部件尤其优 选完全安置在壳体之上和/或之内。更尤其优选地,该阀单元完全安置在壳体内。所述至少 一个操作件、尤其所有的操作件和/或压缩空气入口和/或工作空气入口和/或传感器空气 入口优选直接设置在壳体上。原则上,该控制单元也可以具有超出一个或多个缸的气压控 制的其它的功能,其中该控制单元优选不完成其它功能。此外,该操作件也可以原则上在控 制单元外和/或没有作为控制单元的一部分、尤其是遥控装置来构成。 原则上,本发明意义上的纺织加工机可以是任何机器,其加工织物且在此尤其产 生或加工纱线、捻线、纤维条子等。优选地,在纺织机上喂给纱线、捻线等以便进一步加工并 且为此尤其安置在筒子架上。纺织加工机尤其优选是纺纱机或加捻机,更尤其优选是捻线 机。 筒子架是如下装置且尤其是纺织机的部分,借此可以安装至少一个筒子、尤其是 喂给筒子并且最好也将其供给纺织机。为此,筒子架优选可以执行在用于给筒子架装载筒 子的适合操作位置与使用位置之间的旋转运动,其中该使用位置尤其优选在空间上安置在 5 CN 111594494 A 说 明 书 3/10 页 适合操作位置的上方。至少至使用位置的行程运动最好借助工作流体且在此优选以气压或 替代地也以液压的形式实现,尤其借助至少一个缸。在至少一个方向上可通过气压或马达 来旋转的筒子架此时被称为主动式筒子架。尤其优选地,所述旋转和更尤其优选的是筒子 架的整个操作只以气压方式并且或许补充地以手动或人工的方式由操作者进行。同样优选 地,该筒子架作为具有特殊的缸设计的唯一的整体单元构成。筒子架行程运动的完全执行 被理解为如下过程,此时阀单元长期或一直保持打开,直至到达筒子架的和/或缸的最终位 置,在这里,在行程运动完全执行之后,缸的气压活塞尤其优选完全移出。 根据本发明,压缩空气入口设置在该控制单元处以将控制单元连接至工作流体供 应装置尤其是压缩空气供应装置。通过供应压缩空气给控制单元,允许筒子架的至少一个 缸的气压驱动以执行行程运动。优选地,该筒子架的缸且尤其是所有缸的工作所需要的压 缩空气完全流过控制单元。为了实现很简单的压缩空气供应连接,压缩空气入口和/或工作 空气入口和/或传感器空气入口优选是标准化端口,其中更尤其优选的是控制单元的所有 入口和出口彼此相同地构成。要供给压缩空气入口的压缩空气优选是被压缩的空气,它尤 其优选具有约6巴的压力。但原则上也可以在控制单元内采用任何气体或混合气,其具有任 何足以用于缸工作的高压。 根据本发明,该工作空气出口设置用于能将工作流体尤其是压缩空气从控制单元 引导至缸。优选地,工作空气出口为此可经由该阀单元直接连通至压缩空气入口。工作空气 出口优选被构造用于连接压缩空气管路。还优选地,在工作空气入口处的最大压力等于经 压缩空气入口供应的压缩空气的压力。 原则上,阀单元是该控制单元的一个构件或组件,其可以建立和断开在压缩空气 入口与工作气压出口之间的至少一处连通,或者说通断压缩空气入口与工作压力出口之间 的通道。此时不一定有借助阀单元的压力调节。但在阀单元的一个有利改进方案中可以想 到,规定了具有多个压力级的阀单元可调节性,或者阀单元甚至可无级调节。优选如此构成 该控制单元,该阀单元在控制单元的初始位置中处于关闭位置,其中该控制单元尤其优选 是操作件和/或控制单元的滑阀以气压或机械的方式尤其借助弹簧被偏置向阀单元的关闭 位置。 至少单向作用的缸可以是指任何气压工作或液压工作的缸,或者是另一个直线作 用的、尤其在至少一个空间方向上可伸长的致动器。优选地,该缸只在移出方向上被主动驱 动或者说可接受压缩空气。此时,该缸优选是行程缸并且尤其优选具有朝向一个方向通过 压缩空气可移动的且带有安置在其上的活塞杆的活塞,其中该活塞杆可以关于缸壳体做 功。在单向作用的缸的情况下,尤其优选在任何活塞位置中都是基本关闭的压力腔最好处 于活塞一侧,或许除了一个或多个节流孔外。还优选地,在缸的与压力腔对置的一侧并且尤 其在活动的活塞杆离开缸的区域内有至少一个通风孔,从而在因为流入压力腔的压缩空气 而活塞移动时在活塞的对置侧未进行空气压缩。尤其优选地,至少两个通风孔关于活塞杆 或缸的中心纵轴线对置安置在一个缸端上。 操作件可以首先是任何构件或任何功能单元,其具有至少两个位置或状态。该操 作件优选是键钮并且尤其优选是按钮。该操作件还优选可按压操作。此外,该控制单元也可 以具有另一个操作件或其它的操作件,其中优选至少第一和第二操作件且尤其优选是所有 的操作件彼此相同地构成。 6 CN 111594494 A 说 明 书 4/10 页 自持阀功能是指该阀单元具有至少一个位置,在该位置中它在转移之后保留在该 位置中,直至其因为外侧的或从外面控制的力作用又移出该位置。尤其优选地,它是阀单元 的打开位置。自持阀功能还优选包括该阀单元通过操作件的短暂操作可以从关闭位置被置 于打开位置,随后也在没有操作件进一步操作情况下留在那里,直到阀单元通过进一步的 有目的的力作用又被运动到关闭位置。因此如此构成该控制单元,即,获得自持的阀功能, 此时在操作件的仅一次性操作和/或短暂操作时该阀单元保持在打开位置,从而完全执行 筒子架的行程运动。 在压力升高和/或在传感器空气入口处超出压力阈值、尤其在达到相连的缸的最 终位置时且更确切说在到达相连的缸的活塞的最终位置时,阀单元被关闭,其中位于控制 单元的传感器空气入口处的气压尤其最好直接将阀单元从打开位置转移至关闭位置。此 时,在传感器空气入口的压力阈值优选与在工作空气出口的压力相关地被确定,其中该压 力阈值优选为超过工作空气出口处的压力的50%、尤其优选在50%至200%之间、更尤其优 选在75%至150%之间、尤其最好在80%至120%之间。尤其与贯穿缸活塞的节流孔相关地, 这种极限值确定是有意义的。但原则上,压力阈值可以任意适配于各自要求且尤其是筒子 架的机械结构。 根据本发明,连接至工作空气压力出口的缸在到达一个最终位置时自动变为无压 力,在这里,可以借助缸内的至少一个通风孔和/或借助位置切换阀或任何其它方式实现将 缸自动切换至无压力,在这里,位置切换阀或控制单元的阀单元优选使缸主动排气。在此, 位置切换阀例如可以借助机械接触被切换以探测最终位置。位置切换阀和/或机械接触、尤 其位置接触此时可以是固定于支架上的和/或安置在筒子架上和/或安置在缸上或缸内。另 外,也可以想到在缸内的气压传感器区以测知最终位置。 该操作件的操作是指任何操作,此时该操作件通过操作者从一个规定状态被置入 另一个规定状态。在此,所述操作不仅可以长期进行、也可以仅一次性和/或暂时进行,在这 里两种操作优选导致控制单元的相同状态。 借助控制单元的缸行程运动的监测首先只是指确定缸的特定状态尤其到达最终 位置。为此并不需要在缸内的活塞位置的连续监测,但也可以附加完成。此外,行程运动的 监测也可以包含在工作空气出口和/或传感器空气入口处的压力的暂时监测或连续监测, 以便例如探测发现缸的过载状态。 尤其优选如下的本发明控制单元的实施方式,其具有用于连接最终位置传感器的 传感器空气入口,其中在压力升高和/或超出压力阈值和/或消除在传感器空气入口处的传 感器压力时该阀单元被关闭,和/或连接至工作空气出口的缸在达到最终位置之时或之后 自动变为无压力,由此该控制单元以及与之相关的最终位置传感器可以单纯地气压工作。 最终位置传感器此时可以原则上是任何机械、电子、气压和/或液压作用的或工作的传感 器。传感器优选以气压方式转发信号,并且该传感器尤其优选完全气压工作。 根据本发明的控制单元的一个有利改进方案,该控制单元如此构成,该操作件在 仅一次性操作和/或短暂操作之后尤其被自动停用,并且优选在传感器空气入口处的压力 升高和/或超出压力阈值和/或在消除传感器空气入口处的传感器压力时又被启用,由此以 简单方式排除该操作件的误操作。“停用”首先只是指该操作件进入或被置入如下的工作状 态,在此无法再次操作和/或未造成进一步效果尤其是缸的变化和/或筒子架的行程运动。 7 CN 111594494 A 说 明 书 5/10 页 相应地,“启用”是指该操作件进入或被置入如下的工作状态,在此可以再次操作和/或造成 效果、尤其是阀单元打开。 根据本发明的控制单元的一个优选改进方案,该阀单元具有滑阀,滑阀通过操作 件的操作在控制单元内可以在打开位置和关闭位置之间移动,尤其从阀单元的关闭位置移 动到打开位置,其中该滑阀尤其优选具有一个通道或释放部,其仅在打开位置中将压缩空 气入口与工作空气出口相连,由此以简单方式保证了阀单元的安全可靠的功能并且排除了 就调节出不希望的阀状态意义上的误操作。在此,该通道原则上能以任何方式来设计,只要 该通道在阀单元的打开位置中将压缩空气入口与工作空气出口相连。该通道优选只将压缩 空气入口连通至工作空气出口,或者只在压缩空气入口与工作空气出口之间延伸。在此,该 通道也可以至少局部在滑阀内延伸或只在滑阀表面上尤其以直槽或缺口形式形成。还优选 地,该通道具有分别对应于压缩空气入口和/或工作空气出口的在控制单元壳体上的位置 的开口或对应的伸展尺寸,以便在阀单元的打开位置中将压缩空气入口连通至工作空气出 口。 该滑阀优选完全设置在该控制单元的壳体内。同样优选地,该滑阀呈柱形和/或沿 着周面或沿着其移动方向在该控制单元的壳体上被引导且同时尤其优选不可转动。还优选 地,该滑阀可以通过操作件线性移动。为此,该操作件或该操作件的可移动部分尤其优选直 接安置在滑阀上。该操作件的操作方向还优选对应于滑阀的可移动方向,尤其优选地,所述 操作件和滑阀同轴地、更尤其优选沿同一轴线可移动地布置。 本发明控制单元的如下设计是特别有利的,在此,磁体安置在滑阀上和/或与滑阀 对置地安置在该控制单元的壳体上,从而滑阀在阀单元的打开位置中通过磁体的力被保持 在打开位置,由此以简单的方式形成具有导致自持阀功能的特殊的阀单元磁吸持功能的控 制单元,从而即便只是短暂操作所述操作件阀单元也还可靠地保留在打开位置。优选地,该 磁体在阀单元的打开位置或滑阀的相应位置中贴近滑阀或壳体的相互磁力作用的对置表 面布置,从而发生足够强的磁力相互作用,而在阀单元的关闭位置或滑阀的相应位置中所 述磁力相互作用至少如此弱,即,滑阀未被拉动至打开位置。还优选地,该磁体为永磁体,在 这里也可以想到设计成电磁体。最后优选的是,与磁体相对地在控制单元内、尤其优选在控 制单元的壳体上设置由可磁性吸合的材料、尤其是铁构成的金属板。作为磁体的替代方式, 也可以设置其它的将滑阀保持就位的元件,例如吸盘或魔术搭扣。 根据本发明的控制单元的一个有利改进方案,如此布置该传感器空气入口,即,加 载于此的压力与磁体力反向作用,在这里,为此优选将传感器空气入口连通至阀腔,阀腔布 置在控制单元的壳体尤其是安置在其上的金属板与所述磁体之间,由此以简单方式直接通 过在传感器空气入口处的升高压力可使阀单元从打开位置被调节至关闭位置。在此,一旦 所述压力超过磁体吸持力,在传感器空气入口处的升高压力就简单导致了突然从阀单元的 打开位置变位至关闭位置。在此,所述阀腔优选如此布置,压力升高导致滑阀直接移动到关 闭位置和/或经由传感器空气入口输入的气体直接作用于滑阀。 在本发明的控制单元的一个优选设计中,如此设置一个弹簧尤其是螺旋弹簧,即 该操作件被偏置到阀单元关闭位置的位置。还优选地,该弹簧力与磁体力且尤其是磁作用 方向反向作用,从而在借助加载于传感器空气入口的压力克服磁力之后,该阀单元且尤其 滑阀和/或操作件完全可靠地运动到初始位置或关闭位置。该运动此时对应于自动重启或 8 CN 111594494 A 说 明 书 6/10 页 回调至该操作件的初始位置。 本发明的控制单元的一个优选改进方案的特点是具有第二操作件,其只能在第一 操作件已被操作时被启用或可被操作,和/或借此可以即刻掉转第一操作件的位置和/或功 能,由此以简单的且对于操作者来说直观的方式可以实现另一个操作功能且尤其是由第一 操作件触发的功能的中断。借助第二操作件,尤其能以简单方式又将已操作的且其操作打 开阀单元并且相应地触发了筒子架的行程运动的第一操作件置于初始位置,由此该阀单元 与筒子架位置无关地可以沿着行程运动且尤其在到达最终位置之前被即刻置于关闭位置。 此外,第一操作件回调至初始位置也可以与在传感器空气入口处的压力无关地实现。第二 操作件相应地中断在第一操作件操作之后进行的方法周期,从而可以结束阀功能的自持。 第一和第二操作件优选通过一个杆且尤其优选通过等臂杆相互连接,从而一个操作件从第 一位置到第二位置的操作自动造成另一个操作件从第二位置运动到第一位置。这两个操作 件原则上相应处于不同的状态。尤其当另一个操作件处于可按压的拔出位置和/或被相应 启用时,一个操作件总是被压入和/或停用。 或者也可想到如下实施方式,在此仅设有一个如此设计的操作件,即,它在操作之 后被手动回调,尤其可以从按压位置又被拔出。在此,该操作件尤其优选以蘑菇头开关或蘑 菇头按钮的形式构成。另外,优选在第一操作件拔出或手动回调时进行所进行的方法周期 的即刻中断。 在本发明筒子架的一个优选设计中,缸在一端、尤其在活塞杆出口区域中具有传 感器空气出口的传感器区尤其作为最终位置传感器,传感器空气出口为了阀单元的关闭与 该控制单元的传感器空气入口相连。在此,该传感器区优选如此构成,在缸内快到达活塞最 终位置之前进行在传感器区内的压力升高,由此能以特别简单的方式通过气压来确定最终 位置。在此,该传感器区作为末端止挡传感器、尤其是气压末端止挡传感器。尤其有利地,此 时可以同时压缩下述气体,该气体可被加载在控制单元的传感器空气入口处并且接着在那 里尤其优选直接将阀单元置于关闭位置。在此,所述缸的传感器空气出口优选可以直接连 接至该控制单元的传感器空气入口,或者可以为了按照规定使用该控制单元而直接与之相 连。 根据本发明的筒子架的一个有利改进方案,所述缸在内部在一端尤其在传感器区 中具有横截面缩减区。另外,在活塞上在朝向横截面缩减区的一侧设置有具有与横截面缩 减区的直径对应的直径的传感器活塞,该传感器活塞就在到达活塞最终位置之前不久在缸 内进入横截面缩减区,从而在传感器区内且进而在传感器空气出口处的压力增大。通过这 种升高的压力,借助尤其简单的结构可以尤其不易出故障地实现最终位置的探测。缸内部 和/或横截面缩减区优选具有圆柱形和/或在整个长度范围内具有保持不变的直径。活塞还 优选地具有适配于缸内部的直径并且具有适配于缸内腔的尤其呈圆柱形的形状。同样优选 地,所述至少一个通风孔且尤其优选是所有的通风孔布置在横截面缩减区外,更尤其优选 此时布置在邻接横截面缩减区的区域内。 横截面缩减区的内部优选形成缩小的活塞腔,传感器活塞但不是具有对应于缸内 部的较大直径的活塞可以在该活塞腔内移入。横截面缩减区还优选安置在活塞杆由此伸出 缸的缸端上,同时尤其优选地在活塞盖内或作为活塞盖的一部分形成。横截面缩减区的直 径优选至少比其余缸内部、尤其是活塞可在其内移动的部段的直径小5%、尤其优选小10% 9 CN 111594494 A 说 明 书 7/10 页 和50%之间、更尤其优选小15%和30%之间。最后,传感器活塞具有沿活塞缸中心纵轴线的 长度,该长度优选在传感器区的或横截面缩减区的在此方向上的长度的10%和100%之间、 尤其优选在20%和80%之间、更加尤其优选至少是50%。 在本发明的筒子架的一个可能改进方案中,在活塞内设置有至少一个穿过活塞的 节流孔,以借助工作空气增强在到达最终位置时在传感器区内形成的压力,由此与在缸内 的活塞调节速度无关地能可靠测知最终位置。节流孔此时优选将工作空气所输入的压力腔 直接连通至在缸内的与活塞对置的一侧。另外,节流孔直径优选被选择为如此小,即,可以 在压力腔内借助来自控制单元的工作空气出口的工作空气建立足够高的工作压力,以便能 以足够大的活塞杆力操作缸。但还优选地,该直径大到工作空气能在到达最终位置时足够 快速地流入传感器区,以获得快速可靠的控制单元切换。 根据本发明筒子架的一个优选设计,该筒子架可以被固定在可借助缸的行程运动 获得的最高位置,为此尤其运动经过一个死点或者借助锁止装置尤其又被可分离地固定, 从而缸尤其是缸的压力腔可以连同阀单元关闭地无压力地保留在最终位置中,而筒子架位 置未改变。此时可以如此在筒子架上设置一个弹簧件,使得筒子架因弹簧力而被保持就位。 根据本发明的用于筒子架的主动气压运动的方法的一个优选设计规定,该操件在 阀单元关闭之时或之后又自动地尤其因为在传感器空气入口处的压力升高被置于初始位 置,进而被释放以便下次操作,由此获得特别容易的操作可能性并防止误操作。 根据本发明的用于筒子架的主动气压运动的方法的一个有利改进方案,在阀单元 关闭时且尤其是随之而来的阀单元的滑阀移动时,阀单元的传感器空气入口和/或工作空 气出口被放开以便排气。由此,通过特别简单的方式,缸且尤其是与工作气体出口相连的压 力腔在活塞一侧被排气,和/或缸的与控制单元的传感器空气入口相连的另一部分在活塞 的另一侧被排气,进而被调至无压力。或者,可以设置一个单独的和/或间设在缸和阀单元 或控制单元之间的排气阀以实现排气。 附图说明 以下,参照附图详细说明控制单元的一个实施例、筒子架的其它部分以及用于主 动气压升起筒子架的方法。附图示出了: 图1a示出控制单元的立体图, 图1b示出如图1a所示的控制单元的剖视立体图, 图2示出缸的剖视立体图,和 图3示出用于说明借助控制单元主动气压升起筒子架的方法的基本原理的示意 图。 附图标记列表 1 控制单元 2 压缩空气入口 3 工作空气出口 4 缸 5 阀单元 6 操作件 10 CN 111594494 A 说 明 书 8/10 页 7 传感器空气入口 8 滑阀 9 滑阀的通道 10 磁体 11 控制单元的壳体 12 阀腔 13 第二操作件 14 活塞杆出口 15 传感器区 16 传感器空气出口 17 活塞 18 横截面缩减区 19 活塞侧 20 传感器活塞 21 节流孔 22 等臂杆 23 弹簧 24 活塞杆 25 通风孔 26 铁板 27 工作空气入口 28 通风孔











