
技术摘要:
本发明公开了一种基于枪球联动与BIM的畜牧动物入栏检测方法。该方法包括:对枪机采集到的大范围散养区域的动物图像进行动物检测;进行坐标回归,得到动物关键点坐标;当动物与围栏距离小于设定阈值时,调用球机;球机采集围栏入口图像,处理后得到围栏入口动物热力图; 全部
背景技术:
在畜牧行业,动植物饲养中,为了获得更好的肉制品、奶制品等,往往需要将圈养、 散养结合。圈养的动物数量一般很大,在动物放牧散养后进入围栏后并进行统计时,依靠养 殖者进行观察的传统统计方式已经不适合畜牧行业的现状。 目前对饲养的动物数目统计中,一些方法通过在每个动物上安装位置传感器来实 现数量统计。然而,在实际养殖过程,由于动物数量会随着出栏、繁殖等情况随时出现变化, 传感器统计的方法需要实施者根据情况为动物及时安装传感器,不仅实施成本高而且也为 实施带来了不便。而且,传感器脱落会导致统计偏差,降低准确度。
技术实现要素:
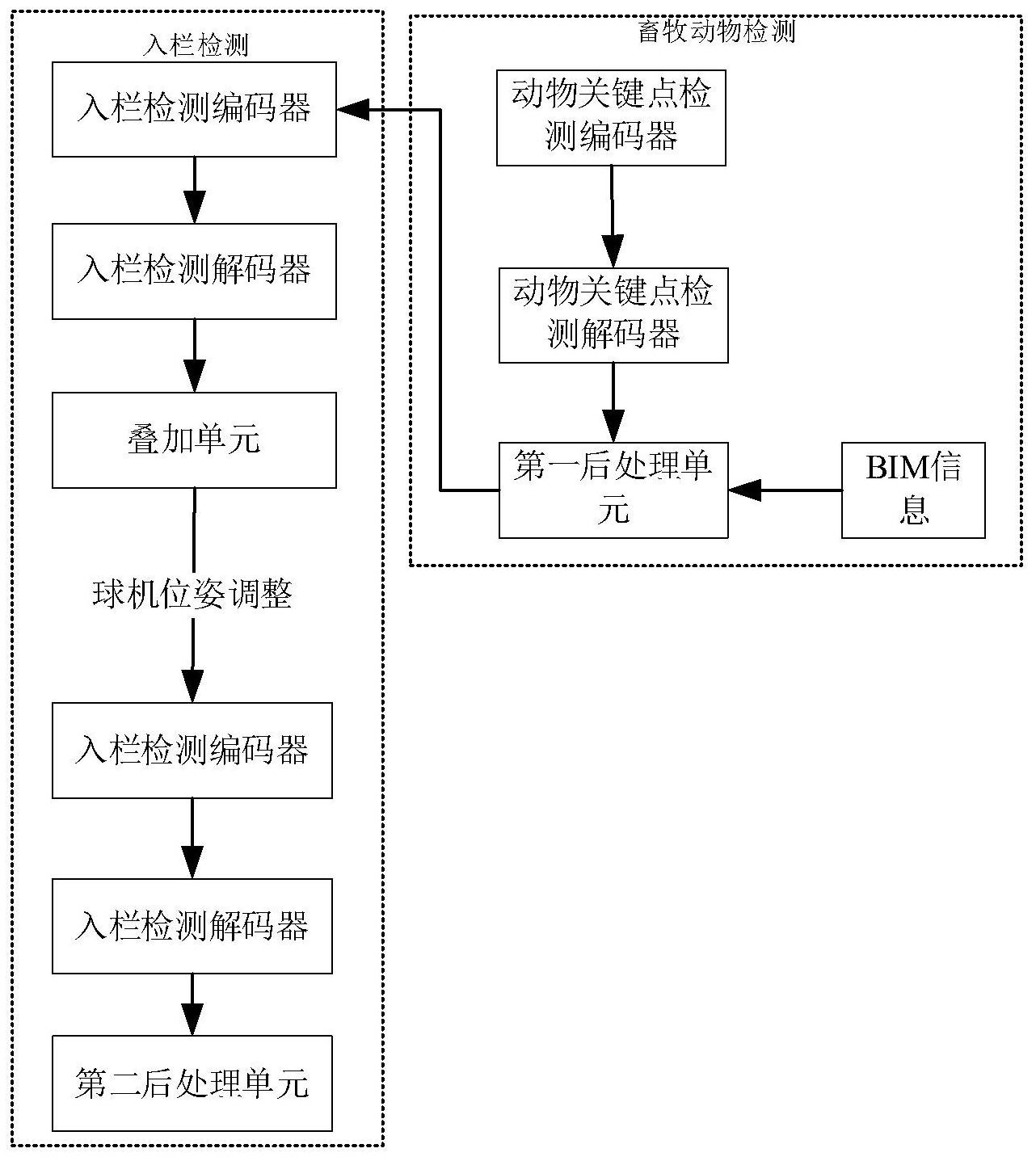
本发明的目的在于针对上述现有技术存在的缺陷,提出一种基于枪球联动与BIM 的畜牧动物入栏检测方法,实现了自动化的畜牧动物入栏检测,不仅提高了畜牧动物入栏 检测的效率和精度,而且提高了数据处理传输过程中的安全性。 一种基于枪球联动与BIM的畜牧动物入栏检测方法,该方法包括: 步骤一,基于畜牧动物检测深度神经网络对枪机采集到的大范围散养区域的动物 图像进行动物检测,得到动物关键点热力图; 步骤二,对动物关键点热力图中的热斑进行坐标回归,得到动物关键点坐标; 步骤三,将动物关键点坐标投影到畜牧养殖区域建筑信息模型的坐标系中,结合 畜牧养殖区域建筑信息模型中围栏入口坐标信息,当动物与围栏距离小于设定阈值时,调 用球机; 步骤四,球机设置为固定位置但拍摄方向可转动,采集围栏入口图像,送入入栏检 测深度神经网络处理后,得到围栏入口动物热力图; 步骤五,使用叠加单元,对时间窗口内多帧围栏入口动物热力图叠加得到动物移 动轨迹,当轨迹消失后,调整球机位姿,使其拍摄围栏内部图像; 步骤六,采集围栏内部区域动物图像经入栏检测深度神经网络进行处理后,得到 围栏内动物热力图; 步骤七,统计围栏内动物热力图热斑的峰值点个数,得到畜牧动物入栏检测结果; 步骤八,结合WebGIS技术对畜牧养殖区域建筑信息模型进行可视化,并展示畜牧 动物入栏检测结果。 在步骤一之前执行以下操作: 配置畜牧动物检测深度神经网络以及第一后处理单元,畜牧动物检测深度神经网 络包括动物关键点检测编码器、动物关键点检测解码器; 4 CN 111612645 A 说 明 书 2/7 页 将深度神经网络推理任务拆分为动物关键点检测编码器推理任务、动物关键点检 测解码器推理任务; 动物关键点检测编码器推理任务分配至采集图像的枪机端,将动物关键点检测解 码器推理任务、第一后处理单元任务分别分配至随机选取的不同的集群计算节点; 枪机以及计算节点中各任务所需参数作为区块主体数据,按照深度神经网络以及 深度神经网络与第一后处理单元之间的运算顺序,将各区块连接,生成第一区块链私链。 畜牧动物检测深度神经网络以散养大区域畜牧动物图像作为训练样本集,对训练 样本集作特征标注,将动物身体中心为关键点,对关键点位置进行高斯模糊生成的一个热 斑进行特征标注,利用均方差损失函数,随机梯度下降法进行训练。 步骤一具体为: 在枪机上,对枪机采集的图像进行动物检测编码器推理任务,输出特征图; 在相应的集群计算节点上,对特征图执行动物关键点检测解码器推理任务,输出 动物关键点热力图。 相应的计算节点上的第一后处理单元执行步骤二、步骤三的操作。 在步骤四之前还包括: 入栏检测深度神经网络包括入栏检测编码器、入栏检测解码器,将入栏检测编码 器推理任务分配至采集图像的球机端,将入栏检测解码器推理任务、叠加单元任务分别分 配至随机选取的不同的集群计算节点; 球机以及计算节点中各任务所需参数作为区块主体数据,按照入栏检测深度神经 网络以及入栏检测深度神经网络与叠加单元之间的运算顺序,将各区块连接,生成第二区 块链私链。 入栏检测深度神经网络以围栏附近小区域动物图像以及围栏内图像作为训练样 本集,对训练样本集作特征标注,将动物身体中心为关键点,对关键点位置进行高斯模糊生 成的一个热斑进行特征标注,利用均方差损失函数,随机梯度下降法进行训练。 步骤五中的调整球机位姿包括: 旋转前相机光心对应像平面中心为围栏门中心点,旋转后相机光心对应像平面中 心为围栏内区域的中心点,以旋转前相机光心到对应相机像平面中心的带方向的距离作为 向量 旋转后相机光心到对应像平面中心的带方向的距离作为向量 旋转后球机光心对 应像平面中心为车前轮间的中心点,计算球机旋转角θ,其公式为: 令 为旋转轴,球机旋转向量的方向为旋转轴,球机旋转向量的模为θ, 得到球机旋转向量 计算旋转矩阵:设球机旋转向量的单位向量为r=[r r r Tx y z] ,角度为θ,对应球机 旋转矩阵为R: 其中I为三阶单位矩阵; 在世界坐标系选择一个点,通过外参矩阵求得其对应相机坐标系的点,结合其像 平面坐标系中对应的点坐标,根据三角形相似计算焦距; 球机根据球机旋转矩阵调整位姿,根据焦距调焦。 5 CN 111612645 A 说 明 书 3/7 页 随机选取的不同的集群计算节点的选择方法为: 根据随机数种子利用逆同余法生成随机数序列,排序生成随机数的数值大小索 引,得到数值大小索引序列,依次取数值大小索引序列中对应索引的云主机实例作为执行 任务的节点。 采用RC5加密算法对所述区块链私链之间传输的数据进行加密、解密。 本发明与现有技术相比,具有以下有益效果: 1 .本发明基于枪球协同的图像采集方式,对畜牧动物入栏过程进行监测,当动物 全部入栏后调整球机位姿进行动物数量统计,整个过程包括是否入栏、球机位姿调整自动 完成,无需人工干预,实现了智能化的畜牧动物入栏检测,提高了入栏检测的效率。 2.本发明采用深度神经网络技术,使用大量畜牧动物图像样本进行训练,具有更 好的泛化性能,提高了本发明方法的稳定性和检测结果的准确度。 3.传统的图像采集方式,如采集大范围信息则无法得到小区域细节信息,采集小 区域细节信息则无法把控大范围情况,本发明根据枪机、球机的特点,采用枪球联动的方式 触发图像采集,更加灵活,而且有助于提高检测精度。 4.本发明针对枪机、球机拍摄图像的不同,分别使用不同的训练样本对畜牧动物 检测深度神经网络、入栏检测深度神经网络进行训练,能够提高网络检测精度。 5.本发明基于集群技术对本发明方法的网络以及其他任务进行分散推理,提高了 并行性。 6.本发明结合区块链技术,配置第一区块链私链、第二区块链私链,提高了网络推 理过程中各任务模块参数的安全性;而且第一区块链私链、第二区块链私链根据节点分配 顺序动态生成,不容易被破解,提高了抗攻击性;进一步地,对区块链私链之间传输的数据 进行加密,防止数据被泄露。 附图说明 图1为本发明的神经网络结构图。











