
技术摘要:
本发明公开了一种基于条纹投影的物体表面缺陷检测方法及系统。该方法包括:获取待识别条纹投影图像的灰度图;采用基于卷积的动态二值化方法对灰度图进行处理;在二值化图像中,每隔M行,提取一行像素;对每一行像素分别进行DBSCAN聚类;选择聚类中心点数量占比最大的行 全部
背景技术:
N步正弦相移条纹投影结构光测量方法的基本思想是通过投影一组光强成正弦分 布的相移条纹图到待测物体表面,由于物体表面高度的变化,从而造成标准条纹图发生形 变,在通过CCD相机依次采集变形条纹图,采用相位展开算法获得相位值,利用相位值与高 度的映射关系来求解高度值,恢复物体的三维特征。N步正弦相移条纹投影结构光测量方法 具有无接触、通用性强的特点,被广泛应用于表面质量检测、逆向工程和三维重建等领域。 在表面质量检测中,存在着缺陷类型单一,缺陷面积较小,条纹投影图像中包含着 的投影设备和CCD所产生的噪声,N步正弦相移条纹投影结构光测量方法需要向待测物体投 影N幅条纹图且容易受到噪声的干扰等问题。将N步正弦相移条纹投影结构光测量方法直接 用于表面质量检测时,不但计算量大,而且容易将噪声误认为是缺陷。因此,针对特定的表 面质量缺陷,需要一种简单抗噪的缺陷检测方法。
技术实现要素:
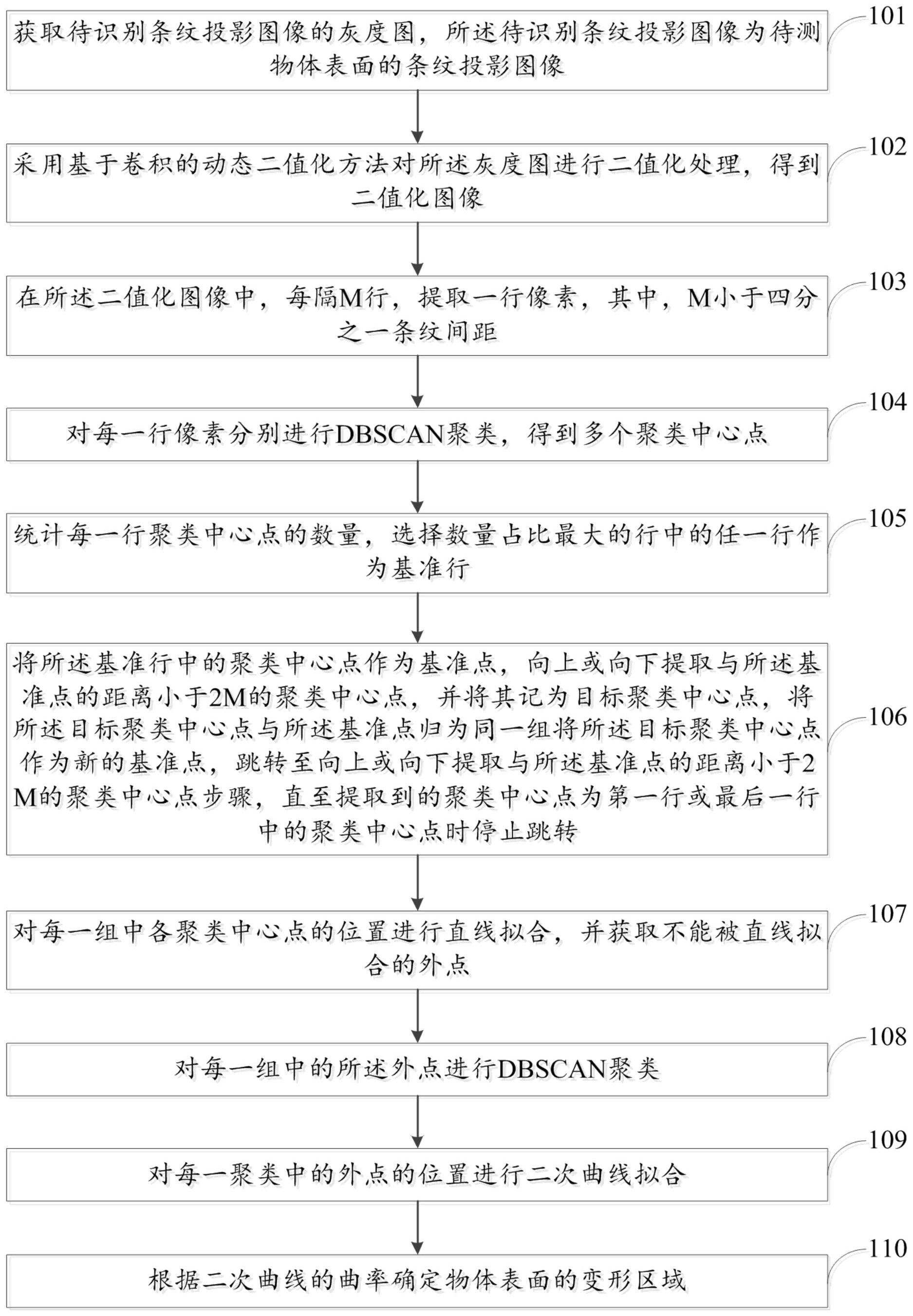
本发明的目的是提供一种简单抗噪的基于条纹投影的物体表面缺陷检测方法及 系统。 为实现上述目的,本发明提供了如下方案: 一种基于条纹投影的物体表面缺陷检测方法,包括: 获取待识别条纹投影图像的灰度图,所述待识别条纹投影图像为待测物体表面的 条纹投影图像; 采用基于卷积的动态二值化方法对所述灰度图进行二值化处理,得到二值化图 像; 在所述二值化图像中,每隔M行,提取一行像素,其中,M小于四分之一条纹间距; 对每一行像素分别进行DBSCAN聚类,得到多个聚类中心点; 统计每一行聚类中心点的数量,选择数量占比最大的行中的任一行作为基准行; 将所述基准行中的聚类中心点作为基准点,向上或向下提取与所述基准点的距离 小于2M的聚类中心点,并将其记为目标聚类中心点,将所述目标聚类中心点与所述基准点 归为同一组; 将所述目标聚类中心点作为新的基准点,跳转至向上或向下提取与所述基准点的 距离小于2M的聚类中心点步骤,直至提取到的聚类中心点为第一行或最后一行中的聚类中 心点时停止跳转; 对每一组中聚类中心点的位置进行直线拟合,并获取不能被直线拟合的外点; 对每一组中的所述外点进行DBSCAN聚类; 4 CN 111551567 A 说 明 书 2/6 页 对每一聚类中的外点的位置进行二次曲线拟合; 根据二次曲线的曲率确定物体表面的变形区域。 可选的,所述根据二次曲线的曲率确定物体表面的变形区域,具体包括: 判断所述二次曲线的曲率是否满足设定曲率; 如果是,则根据满足设定曲率的二次曲线中的外点确定变形位置。 可选的,所述设定曲率包括用于确定缺陷为凸点的第一设定曲率范围以及用于确 定缺陷为凹点的第二设定曲率范围。 可选的,所述对采用基于卷积的动态二值化方法对所述灰度图进行二值化处理, 具体包括: 初始化一张与所述灰度图同大小的图像x; 以K×K大小的窗口和步长为K/2对所述灰度图进行卷积裁剪,得到多张裁剪图片; 采用OTSU法对将所述裁剪图片进行二值化,并根据二值化结果,在图像x上对应位 置将加1或0; 采用OTSU法对图像x进行二值化,得到所述灰度图的二值化图像。 本发明还提供了一种基于条纹投影的物体表面缺陷检测系统,包括: 图像获取模块,用于获取待识别条纹投影图像的灰度图,所述待识别条纹投影图 像为待测物体表面的相移条纹投影图像; 二值化处理模块,用于采用基于卷积的动态二值化方法对所述灰度图进行二值化 处理,得到二值化图像; 像素提取模块,用于在所述二值化图像中,每隔M行,提取一行像素,其中,M小于四 分之一条纹间距; 第一聚类模块,用于对每一行像素分别进行DBSCAN聚类,得到多个聚类中心点; 基准行选取模块,用于统计每一行聚类中心点的数量,选择数量占比最大的行中 的任一行作为基准行; 聚类中心点提取模块,用于将所述基准行中的聚类中心点作为基准点,向上或向 下提取与所述基准点的距离小于2M的聚类中心点,并将其记为目标聚类中心点,将所述目 标聚类中心点与所述基准点归为同一组;将所述目标聚类中心点作为新的基准点,跳转至 向上或向下提取与所述基准点的距离小于2M的聚类中心点步骤,直至提取到的聚类中心点 为第一行或最后一行中的聚类中心点时停止跳转; 直线拟合模块,用于对每一组中各聚类中心点的位置进行直线拟合,并获取不能 被直线拟合的外点; 第二聚类模块,用于对每一组中的所述外点进行DBSCAN聚类; 二次曲线拟合模块,用于对每一聚类中的外点的位置进行二次曲线拟合; 变形区域确定模块,用于根据二次曲线的曲率确定物体表面的变形区域。 可选的,所述变形区域确定模块,具体包括: 曲率判断单元,用于判断所述二次曲线的曲率是否满足设定曲率; 变形位置确定单元,用于在所述二次曲线的曲率满足设定曲率时,根据满足设定 曲率的二次曲线中的外点确定变形位置。 可选的,所述设定曲率包括用于确定缺陷为凸点的第一设定曲率范围以及用于确 5 CN 111551567 A 说 明 书 3/6 页 定缺陷为凹点的第二设定曲率范围。 可选的,所述二值化处理模块,具体包括: 初始化单元,用于初始化一张与所述灰度图同大小的图像x; 卷积裁剪单元,用于以K×K大小的窗口和步长为K/2对所述灰度图进行卷积裁剪, 得到多张裁剪图片; 第一二值化单元,用于采用OTSU法对将所述裁剪图片进行二值化,并根据二值化 结果,在图像x上对应位置将加1或0; 第二二值化单元,用于采用OTSU法对图像x进行二值化,得到所述灰度图的二值化 图像。 根据本发明提供的具体实施例,本发明公开了以下技术效果:本发明提供的基于 条纹投影的物体表面缺陷检测方法及系统,采用DBSCAN聚类方法获得亮纹的中心点,去除 了零散的噪声点;通过选取聚类数量分布最大的基准行,并从基准行向上下寻找同类采样 点,有效避免了大面积条状噪声点的干扰;通过最小二乘法将亮纹中心采样点拟合到直线, 以提取出非直线的采样点,并将非直线采样点拟合到二次曲线,根据二次曲线的曲率来判 断是否是满足条件的异常点,实现了对凸凹缺陷的异常点的快速提取,而且可以避免噪声 所造成的干扰。 本发明相对于N步正弦相移条纹投影结构光测量方法,无需采样多幅条纹图,仅需 单张条纹图,节约了图像拍摄时间,降低了设备的损耗。同时本发明没有重建物体表面所有 点的三维坐标,仅依靠条纹特征确定凸凹点,计算速度快,抗噪性好。 附图说明 为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所 需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施 例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获 得其他的附图。 图1为本发明实施例1提供的基于条纹投影的物体表面缺陷检测方法流程图; 图2为本发明实施例2提供的基于条纹投影的物体表面缺陷检测系统结构示意图。











