
技术摘要:
本发明提出一种大鼠自动离心训练装置及其工作方法,包括测力单元、位置检测单元、训练单元和系统控制器,测力单元上方均匀布置有若干个训练单元,位置检测单元设置在训练单元一侧,训练单元上方设置有提升机构;测力单元、位置检测单元和提升机构均与系统控制器相连接 全部
背景技术:
随着智能云和物联网技术的发展,仪器设备的智能化、信息化、自动化程度的不断 提高,人们对仪器设备的自动化依赖程度进一步加深,也就对实验仪器的可靠性和智能化 提出了更高的要求。无论在医学、体育、康复、生物学、生命科学对生物体的肢体运动的研究 领域中,还是在体育教学仪器领域中,试验及训练过程的自动化、训练手段的标准化及精细 化、试验数据的完整性和试验全程的信息化都提出了更高的要求。由于传统的仪器设备自 动化程度低,需要科研人员过度的参与看护、人工操作、手动记录数据,这会造成科研人员 精力的巨大浪费、科研效率的低下、科研方法简陋、科研手段粗糙,进而增大试验结果失败 的风险。
技术实现要素:
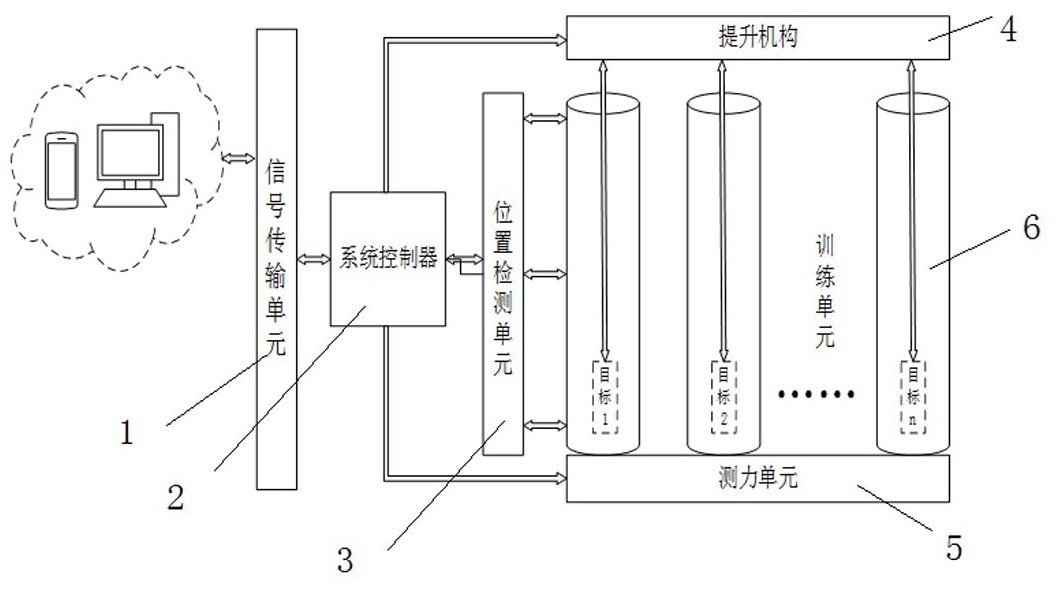
针对目前实验仪器在肢体运动过程中,需要科研人员过度的参与看护、人工操作 和手动记录数据,造成科研人员精力的巨大浪费,科研效率低下的技术问题,本发明提出一 种大鼠自动离心训练装置及其工作方法。 为了解决上述问题,本发明的技术方案是这样实现的: 一种大鼠自动离心训练装置,包括测力单元和位置检测单元,所述测力单元上方均匀 布置有若干个训练单元,位置检测单元设置在训练单元上方且相邻训练单元通过透明玻璃 罩相配合,训练单元上方设置有提升机构,提升机构用于将训练目标提升和降落;所述测力 单元、位置检测单元和提升机构均与系统控制器相连接,系统控制器通过信号传输单元与 终端相连接。 优选地,所述测力单元包括第一测力机构和第二测力机构,第一测力机构设置在 训练单元下方且第一测力机构和第二测力机构均与系统控制器相连接。 优选地,所述第一测力机构为固定式测力机构且第一测力机构包括悬臂梁压电桥 传感器,悬臂梁压电桥传感器安装在训练单元下方;所述第二测力机构包括无线穿戴测力 单元,无线穿戴测力单元与大鼠相配合,无线穿戴测力单元上设置有加速度传感器,无线穿 戴测力单元和悬臂梁压电桥传感器均与系统控制器相连接。 优选地,所述提升机构包括夹紧组件和升降组件,夹紧组件活动设置在训练单元 上方且升降组件与夹紧组件相配合,升降组件和夹紧组件均与系统控制器相连接。 优选地,所述升降组件包括提升套绳,提升套绳与拽引机构相连接,拽引机构与电 机相连接,电机与系统控制器相连接;所述提升套绳与夹紧组件相配合。 优选地,所述夹紧组件包括两组对称设置的夹板,夹紧通过连接臂与电动气缸相 连接,电动气缸与系统控制器相连接;所述两组对称设置的夹板与夹紧组件中的提升套绳 4 CN 111587808 A 说 明 书 2/5 页 相配合。 优选地,所述位置检测单元包括红外探测器或摄像头,红外探测器或摄像头安装 在训练单元上方且红外探测器或摄像头与系统控制器相连接。 一种大鼠自动离心训练装置的工作方法,包括以下步骤: S1、首先选定对单个或多个目标同时进行离心训练,将训练目标放置在相应的训练单 元中,同时将测力单元中的无线穿戴测力单元和提升机构中的提升套绳戴在训练目标身 上; S2、随后实验人员通过终端向系统控制器发送控制信号,系统控制器收到控制信号后 控制提升单元中电机和电动气缸动作,提升单元带动训练目标进行多样本周期对照训练; S3、训练目标提升,系统控制器控制提升机构中电机正转使提升套绳上升,训练目标被 提升套绳牵引上升,提升到设定高度,通过位置检测单元实时对训练目标进行跟踪; S4、训练目标位置锁定,当位置检测单元检测到达预定高度时,系统控制器控制提升机 构中电动气缸伸出带动夹板将提升套绳夹紧,此时训练目标处于悬空状态; S5、训练目标自由下降准备,根据步骤S4,夹板夹紧提升套绳后,系统控制器控制电机 反转使提升套绳下降自然落至夹板上,至此完成一个训练目标提升到设定高度和训练目标 自由落体准备; S6、训练目标自由落体运动,根据步骤S5完成后,系统控制器控制电动气缸回缩,此时 两组夹板松开提升套绳,训练目标做自由落体运动直至目标稳定降落到训练单元下方的测 力单元上,至此完成一个训练目标下降过程; S7、根据步骤S3~S6,训练目标训练过程中,位置检测单元中红外探测器或摄像头对训 练目标目标运行轨迹实时监测,测力单元中加速度传感器和悬臂梁压电桥传感器分别对训 练目标着地时产生的加速度和训练目标刚接触底面时产生的压力连续采样,采样数据实时 传输至现场控制,系统控制器将训练目标的位置信息、着地时检测的加速度和压力信息实 时通过信号传输单元传输至终端。 与现有技术相比,本发明的有益效果: 本发明整体装置布置紧凑,可以同时对单个或多个被测目标进行离心训练,通过提升 机构中提升套绳带动目标向上提升,当训练目标达到训练高度时,利用夹板夹紧固定提升 套绳后,将提升套绳完全落在夹板上,随后夹板松开,训练目标做自由落体运动,在训练目 标自由落体训练过程中,通过悬臂压电桥传感器和加速度传感器对目标落地时的着地力和 着地加速度实时检测,检测数据实时通过系统控制器传输至终端,避免了科研人员人工操 作,手动记录数据的繁琐,解决了目前实验仪器对肢体运动试验过程中,需要科研人员过度 参与看护、人工操作和手动记录数据,造成科研人员精力的巨大浪费,科研效率低的技术问 题。 附图说明 为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现 有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本 发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以 根据这些附图获得其他的附图。 5 CN 111587808 A 说 明 书 3/5 页 图1为本发明的工作原理示意图。 图2为本发明中训练单元的结构示意图。 图3为本发明中位置检测单元的信号传输原理图。 图4为本发明中提升机构的信号原理图。 图5为本发明中提升过程示意图。 图6为本发明提升套绳夹紧状态示意图。 图7为本发明中提升套绳松开状态示意图。 图8为本发明中提升套绳下降状态示意图。 图9为本发明中系统控制器的信号控制原理图。 图10为本发明中信号传输单元的信号传输示意图。 图11为本发明中测力单元的工作原理示意图。 图中,1为信号传输单元,2为系统控制器,3为位置检测单元,4为提升机构,41为夹 板,42为提升套绳,5为测力单元,6为训练单元。











