
技术摘要:
本发明涉及一种基于MATLAB的平流层飞艇升空多物理场耦合的解耦方法,包括:S1,建立平流层飞艇的六自由度动力学模型;S2,建立平流层飞艇的平均热力学模型;S3,对平流层飞艇的动力学模型和热力学模型进行时域离散化;S4,采用牛顿迭代法,将每一时间微元的初始力场和 全部
背景技术:
平流层飞艇作为重要的临近空间飞行器,具有重要的军用价值和民用价值。飞艇 在升空全过程的仿真过程中涉及复杂的多物理场耦合问题,尤其是动力学和热力学的耦合 非线性问题,因此在预测平流层飞艇升空轨迹和控制前反馈对比等关键技术方面,高效快 速地解耦多物理场和观测各运动物理量对平流层飞艇的轨迹优化和控制设计具有重要的 指导意义。目前国内外关于平流层飞艇的多物理场解耦方法主要是基于SIMULINK工具箱的 解耦,SIMULINK工具箱主要适用于研究单自由度的一维飞艇热力耦合问题,具有以下三点 局限性: (1)涉及多物理场及六自由度耦合问题解耦缺乏有效的解耦手段, SIMULINK自带 工具箱解耦速度慢,效率低; (2)在控制计算误差方面无法有效使用迭代控制至允许误差范围; (3)排错性能低,无法实时监测每一计算步的结果及其误差,为实时的飞艇升空测 试提供有效的数据支撑 综上所述,行业内对现有关于平流层飞艇的多物理场耦合问题的解耦仍缺少一种 高效精准可实现六自由度热力解耦的低成本计算方法。
技术实现要素:
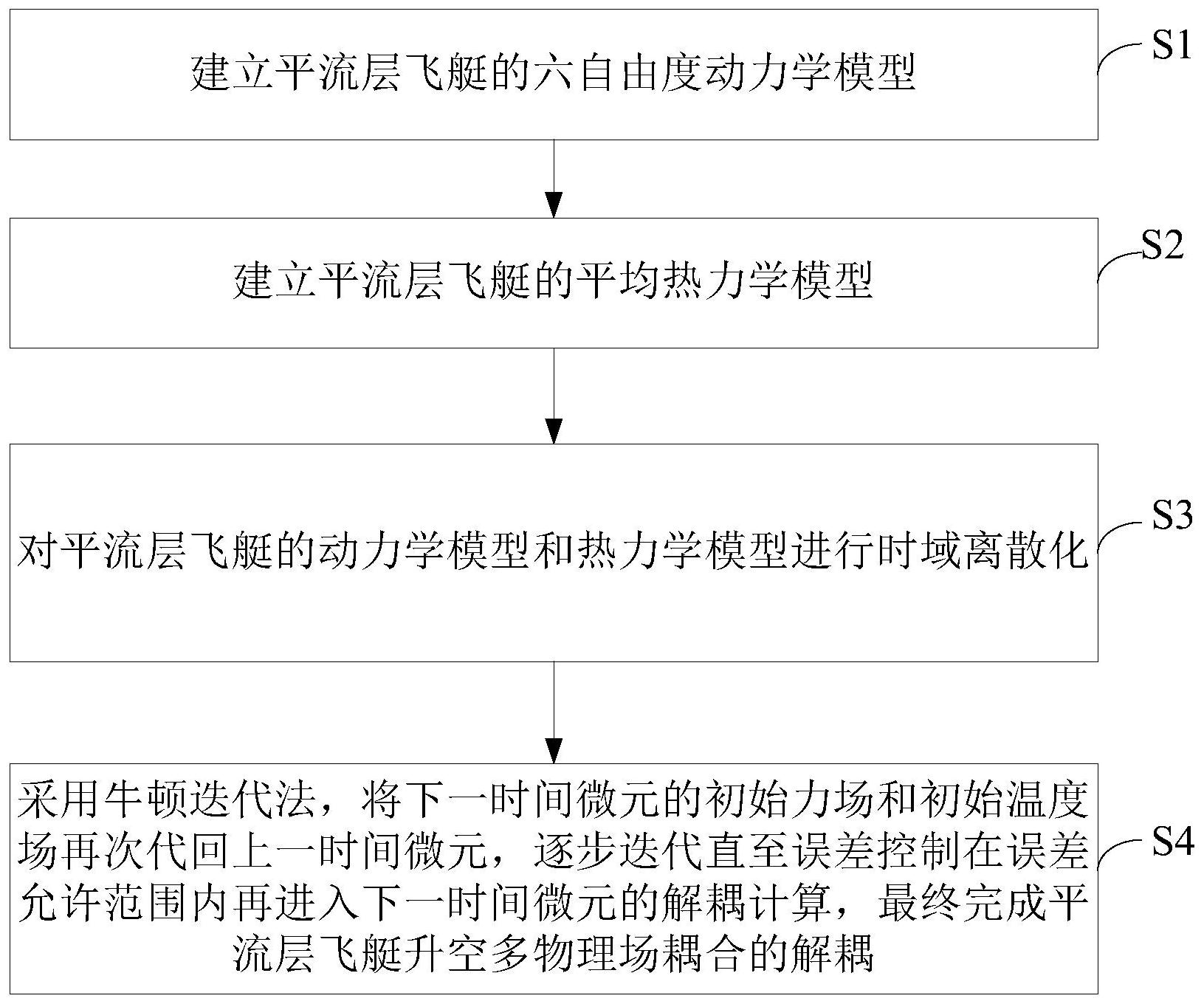
基于此,有必要针对多物理场的六自由度耦合问题解耦速度慢、效率低和误差大 的问题,提供一种基于MATLAB的平流层飞艇升空多物理场耦合的解耦方法。 一种基于MATLAB的平流层飞艇升空多物理场耦合的解耦方法,应用在平流层飞艇 升空全过程多物理场场景,包括: S1,建立平流层飞艇的六自由度动力学模型; S2,建立平流层飞艇的平均热力学模型; S3,根据每一时间微元的初始力场和初始温度场,动力学方程线性化后再计算时 间微元内的温度变化,推导出下一时间微元的初始力场和初始温度场,完成对平流层飞艇 的动力学模型和热力学模型的时域离散化; S4,采用牛顿迭代法,将每一时间微元的初始力场和初始温度场重新代回该时间 微元内的排气控制方程,逐步迭代直至误差控制在误差允许范围内再进入下一时间微元的 解耦计算,最终完成平流层飞艇升空多物理场耦合的解耦。 优选地,步骤S1包括结合平流层飞艇自重、气囊气体浮力、粘附质量、空气动力模 型建立平流层飞艇的六自由度动力学模型; 5 CN 111581789 A 说 明 书 2/9 页 其中,结合平流层飞艇自重建立平流层飞艇六自由度动力学模型包括:经坐标系 转换后,平流层飞艇的重力在艇体坐标系下表达式为: 结合气囊气体浮力建立平流层飞艇六自由度动力学模型包括:经坐标系转换后, 浮力方程在艇体坐标系下表达式为: 结合粘附质量建立平流层飞艇六自由度动力学模型包括:艇体坐标系下飞艇表面 粘附质量方程为: 结合空气动力建立平流层飞艇六自由度动力学模型包括:艇体坐标系下空气动力 方程为: 其中,ψ为航迹偏航角,θ为俯仰角,φ为滚转角,xG、yG、zG为飞艇重心在艇体坐标系 中分别沿ox、oy、oz轴的坐标位置,G为艇体的自重,B为飞艇所受浮力,C eb 为惯性坐标系与艇 体坐标系的转化矩阵,由于艇体坐标系的坐标原点选在浮心,因此浮力对艇体原点不产生 力矩;mii(ii=1~6)为飞艇在理想流体以单位加速度或单位角速度运动时所受的流体惯性 力矩阵中的对角线元素,u,v,w分别表示飞艇沿艇体坐标系下的三个速度分量, p,q,r分别 表示飞艇沿艇体坐标系下的三个角速度分量,Xl,Yl,Zl分别表示粘附质量按机体坐标系分 解产生的惯性力;Ll,Ml,Nl分别表示粘附质量按机体坐标系分解产生的力矩;Xa,YaZa分别表 示空气动力按机体坐标系分解产生的惯性力,La ,Ma ,Na分别表示空气动力按机体坐标系分 6 CN 111581789 A 说 明 书 3/9 页 解产生的力矩,S 为平流层飞艇的特征面积,Va为平流层飞艇总体积,q=0.5ρV2为动压,CX、 CY、CZ分别为阻力系数,侧力系数和升力系数,CN、CM、CL分别为偏航、俯仰和滚转力矩系数。 优选地,六自由度动力学模型的方程为: 其中,Ix,Iy,Iz分别表示绕艇体坐标系的惯性矩,Ixy,Ixz,Iyz分别表示绕艇体坐标 系的惯性积,六自由度动力学模型的方程中的前三式分别表示轴向力方程(艇体坐标系x 轴)、侧向力方程(艇体坐标系y轴)、垂直向力方程(艇体坐标系z轴),六自由度动力学模型 的方程的后三式分别表示滚转力矩方程(绕艇体坐标系x轴转动)、俯仰力矩方程(绕艇体坐 标系y 轴转动)、偏航力矩方程(绕艇体坐标系z轴转动)。 优选地,步骤S2包括:根据能量守恒定律、理想气体状态方程、比热容公式,同时假 定每个时间微元中气囊内外无质量流的流入和流出建立平流层飞艇的平均热力学模型。 优选地,步骤S3包括:通过排气控制方程m(tn)根据tn时刻的物理量值推导出时间 微元的排气量m(dt),从而得到tn 1时刻的飞艇的总质量: 其中,tn时刻的物理量包括压强、体积、压差和温度值,m为飞艇总质量,Pm,ΔP,ρ1, R1,T1分别为气囊内部的气体压强、气囊内外压差,气体密度、气体常数、气体温度。 优选地,步骤S3中的每一时间微元内温度的表达式为: 其中,Tfilm,THe,Tair分别表示飞艇蒙皮,氦气,副气囊气体的温度值, mfilm,mHe,mair 分别表示飞艇蒙皮,氦气,副气囊气体的质量,cfilm,cHe,cair分别表示蒙皮,氦气,副气囊气 体的比热容。 优选地,步骤S4中的力场和温度场在误差允许范围内解耦出的平流层飞艇升空过 程的速度场变化量表达式为: 7 CN 111581789 A 说 明 书 4/9 页 其中,u,v,w分别表示飞艇沿艇体坐标系下的速度分量,p,q,r分别表示飞艇沿艇 体坐标系下的角速度分量。 优选地,平流层飞艇具有XOZ纵向对称面,平流层飞艇体心与浮心的位置一致,同 时重心、体心、浮心位置均位于纵向对称面内。 与现有技术相比,本发明的有益效果在于: 本发明所提供的基于MATLAB的平流层飞艇升空全过程多物理场耦合的解耦计算 方法按照时域离散的基本思路,分别对已建立的平流层飞艇动力学模型和热力学模型中进 行时域离散化,取每一时间微元的各初始力场和初始温度场进行线性解耦,推导出下一时 间微元的初始力场和初始温度场,逐步解耦后为控制误差,在每一时间微元中引入牛顿迭 代法使误差控制在允许的范围,本发明可有效的解决现有平流层飞艇多自由度热力解耦低 效,误差不可控的技术问题,实现了快速、低成本的解耦运算,保证了解耦结果的准确性和 高效性,可为指导平流层飞艇放飞试验提供即时的解耦数据支撑,对飞艇的仿真模拟及控 制设计具有重要的指导意义。 附图说明 图1为一实施例的基于MATLAB的平流层飞艇升空多物理场耦合的解耦方法的示意 性流程图。 图2为一实施例的基于MATLAB的平流层飞艇升空多物理场耦合的解耦方法的解耦 流程图。 图3为一实施例的飞艇解耦后的速度-时间曲线图。 图4为一实施例的飞艇解耦后俯仰角-时间曲线。 图5为一实施例的飞艇解耦后主气囊气温-时间曲线图。 图6为一实施例的飞艇解耦后气囊内外压差-时间曲线图。











