
技术摘要:
本公开涉及无人车技术领域,提供了一种无人车货箱的装卸设备、安装系统及安装方法。包括支撑架与驱动装置,支撑架包括两个相对设置的支腿,支撑架的上方设置有轨道,两个支腿分别位于轨道的两端,轨道与两个支腿可拆卸地连接,轨道上设置有行走机构,行走机构用于支撑 全部
背景技术:
近年来,无人驾驶技术得到了迅猛的发展。无人车的应用领域也越来越广泛,其用 于居民区、办公园区等区域的点到点快递收发及货物运输中极大的解放了劳动力,为人们 带来了极大的便利。在应用于快递收发及货物运输中时,无人车车体内设置有可拆卸更换 的货箱以便于快速装载物品。但是现有技术中更换货箱比较困难,需要人工更换,其自动化 程度低;且人工更换不能确保货箱与车体进行精确的配合。因此如何解决浪费人力的问题、 解决货箱安装效率低的问题及解决货箱的安装精度低的问题,成为了无人车技术中的技术 难题。
技术实现要素:
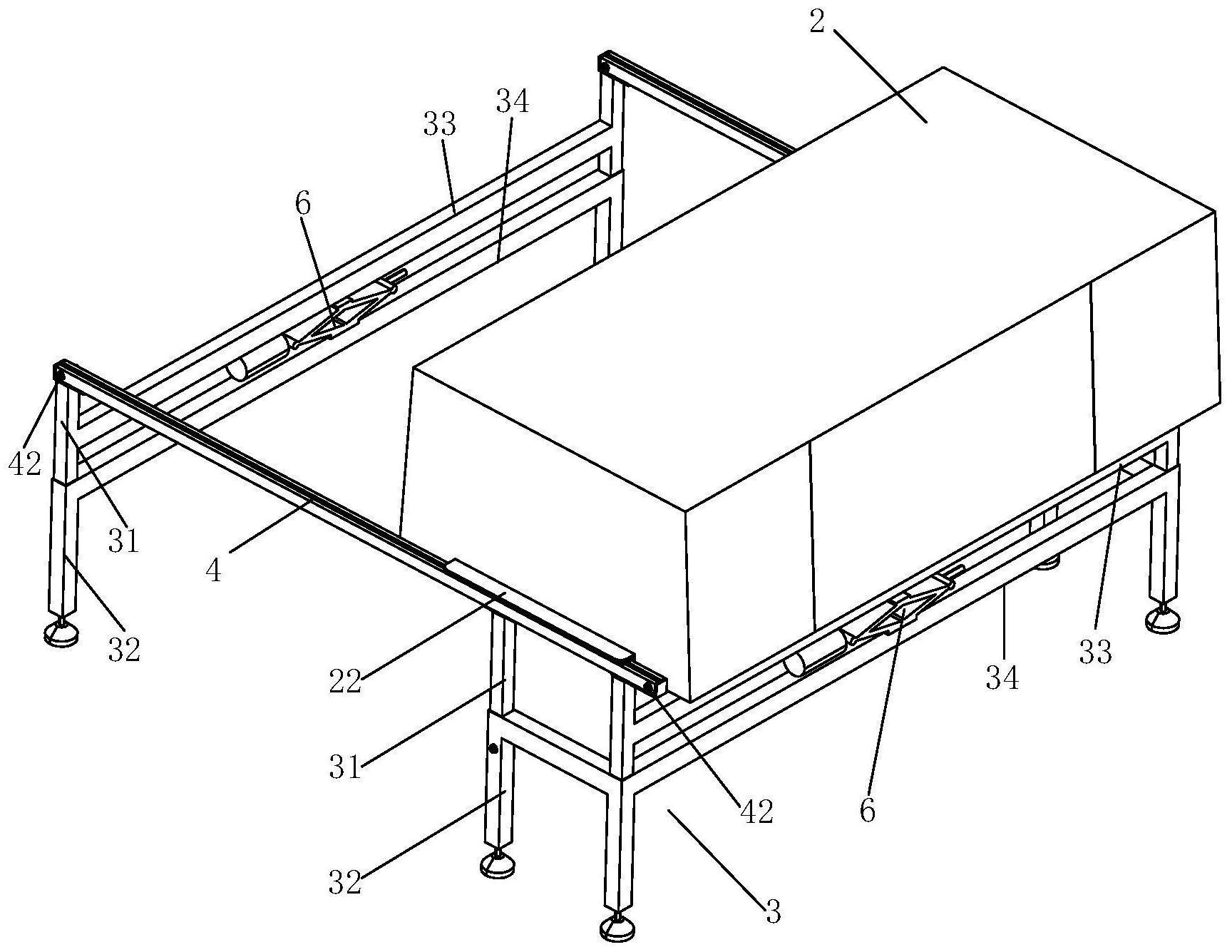
为了解决上述技术问题或者至少部分地解决上述技术问题,本公开提供了一种无 人车货箱的装卸设备、安装系统及安装方法,节省人力,提高货箱安装效率及货箱安装精 度。 本公开提供了一种无人车货箱的装卸设备,包括支撑架与驱动装置,所述支撑架 包括两个相对设置的支腿,所述支撑架的上方设置有轨道,两个所述支腿分别位于所述轨 道的两端,所述轨道与两个所述支腿可拆卸地连接,所述轨道上设置有行走机构,所述行走 机构用于支撑货箱,且所述行走机构可在所述轨道的两端之间进行移动,所述驱动装置用 于驱动所述轨道升降。 可选的,所述支腿包括上支腿和下支腿,所述轨道可拆卸地连接于两个所述上支 腿的上方,所述驱动装置设置于所述上支腿与所述下支腿之间,所述驱动装置用于驱动所 述上支腿相对于所述下支腿升降。 可选的,所述上支腿上设置有上横梁,所述下支腿上设置有下横梁,所述驱动装置 采用伸缩机构,所述伸缩机构设置于所述上横梁与所述下横梁之间,所述伸缩机构的上端 和下端对应与所述上横梁与所述下横梁连接。 可选的,所述伸缩机构包括第一电机、第一驱动杆及第一菱形伸缩件,所述第一菱 形伸缩件在水平方向上的两个角点为第一角点和第二角点,所述第一电机用于驱动所述第 一驱动杆的一端转动,所述第一驱动杆的另一端穿过所述第一角点并与所述第二角点螺纹 连接;优选的,所述第一菱形伸缩件在竖直方向上的两个角点均为钝角。 可选的,所述伸缩机构包括第二电机、第二驱动杆及第二菱形伸缩件,所述第二菱 形伸缩件在水平方向上的两个角点为第三角点和第四角点,所述第二电机与所述第二驱动 杆的一端伸缩配合,所述第二驱动杆的另一端依次穿过所述第三角点和所述第四角点并设 置有限位块,所述限位块与所述第四角点的外侧限位配合;优选的,所述第二菱形伸缩件在 4 CN 111606242 A 说 明 书 2/6 页 竖直方向上的两个角点均为钝角。 可选的,所述轨道在长度方向上设置有容纳腔,所述行走机构与所述容纳腔在所 述轨道的长度方向上构成滑动配合或滚动配合。 可选的,所述轨道在长度方向上开设有T型槽,所述T型槽构成所述容纳腔,所述行 走机构包括设置于所述T型槽内的滚轮基座,所述滚轮基座的两侧均设置有滚轮,所述滚轮 基座相对所述T型槽的槽口延伸出有支撑杆,所述支撑杆的上端设置有支座板,所述支座板 用于支撑货箱,所述T型槽的两端均开设有安装孔,所述安装孔内可拆卸连接有限位杆。 可选的,所述轨道包括处于车体内的车内轨道和处于车体外的车外轨道,所述驱 动装置设置于车体内用于驱动所述车内轨道升降。 本公开还提供了一种无人车货箱,包括货箱的本体,所述货箱的本体上设置有支 撑部,所述货箱的本体能通过所述支撑部设置于无人车货箱的装卸设备上。 本公开还提供了一种无人车货箱的安装系统,包括车体、货箱及无人车货箱的装 卸设备。 可选的,所述货箱上设置有齿条,所述齿条的长度方向与所述轨道的长度方向平 行,所述车体上设置有与所述齿条配合的驱动齿轮。 本公开还提供了一种无人车货箱的安装方法,包括如下步骤: 步骤一,将轨道插入到车体内部并穿过所述车体; 步骤二,将轨道安装到支撑架上,所述支撑架用于支撑所述轨道,且所述支撑架的 高度可调; 步骤三,将货箱放置到所述轨道的位于所述车体外侧的部分上; 步骤四,使得所述货箱沿所述轨道移动至所述车体的内部; 步骤五,调整所述支撑架的高度,使所述货箱落至所述车体内; 步骤六,将所述轨道从所述支撑架拆卸下来,并将所述轨道移出所述车体。 本公开实施例提供的技术方案与现有技术相比具有如下优点:支撑架布置于无人 车外侧,将轨道可拆卸地与支撑架连接,使得轨道延伸至车体内,首先将货箱吊装至处于车 体外的轨道上,货箱通过行走机构与轨道构成行走配合,此时可便捷的将货箱移动至处于 车体内的轨道上,随后通过驱动装置升降轨道,如此即可精确的将轨道上的货箱移动至与 车体进行配合的位置,如此实现货箱的安装,随后将轨道从车体内拆除;避免人工过多的参 与操作,提高货箱安装效率及货箱安装精度。 附图说明 此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本公开的实施 例,并与说明书一起用于解释本公开的原理。 为了更清楚地说明本公开实施例或现有技术中的技术方案,下面将对实施例或现 有技术描述中所需要使用的附图作简单地介绍,显而易见地,对于本领域普通技术人员而 言,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。 图1为本发明实施例提供的无人车货箱的装卸设备的立体示意图; 图2为本发明实施例提供的无人车货箱的装卸设备的主视图; 图3为图1中伸缩机构的布置形式一示意图; 5 CN 111606242 A 说 明 书 3/6 页 图4为图1中伸缩机构的布置形式二示意图; 图5为图1中支腿与轨道的局部配合示意图; 图6为图1中行走机构的立体示意图; 图7为本发明实施例提供的驱动装置布置于车体内的主视图; 图8为图7中驱动件二、U型槽板及轨道配合的侧视图。 其中,1、车体;11、驱动齿轮;2、货箱;21、齿条;22、挂架;3、支撑架;31、上支腿;32、 下支腿;33、上横梁;34、下横梁;4、轨道;41、T型槽;42、限位杆;43、车内轨道;44、车外轨道; 5、行走机构;51、滚轮;52、滚轮基座;53、支撑杆;54、支座板;6、伸缩机构;61、第一电机;62、 第一驱动杆;63、第一菱形伸缩件;631、第一角点;632、第二角点;633、固定座;64、第二电 机;65、第二驱动杆;66、第二菱形伸缩件;661、第三角点;662、第四角点;663、限位块;67、驱 动件一;68、驱动件二;69、U型槽板。











