
技术摘要:
本发明涉及一种激光雷达系统,包括:发射装置,用于发射多组具有不同频率的出射激光;发射光学系统,用于将所述出射激光射向检测区域;接收装置,用于接收反射激光;所述反射激光为所述出射激光被检测区域内的物体反射后的激光;接收光学系统,用于接收所述反射激光并 全部
背景技术:
激光雷达通过发射激光束实现对目标测距、测试等功能。目前激光雷达已经被广 泛应用于诸如深度感知、测绘测距等领域中。Flash激光雷达(也可以称之为快闪激光雷达) 属于一种非扫描式激光雷达,根据光源为脉冲式或者连续波的不同,测距原理分别对应基 于飞行时间的脉冲测距(TOF)和基于连续波的测相测距(AMCW)。FLASH激光雷达的光源一次 性“照亮”整个视场,能量衰减快;另外受限于自身测距原理的二义性间隔,不适用于远距离 探测的应用场景。
技术实现要素:
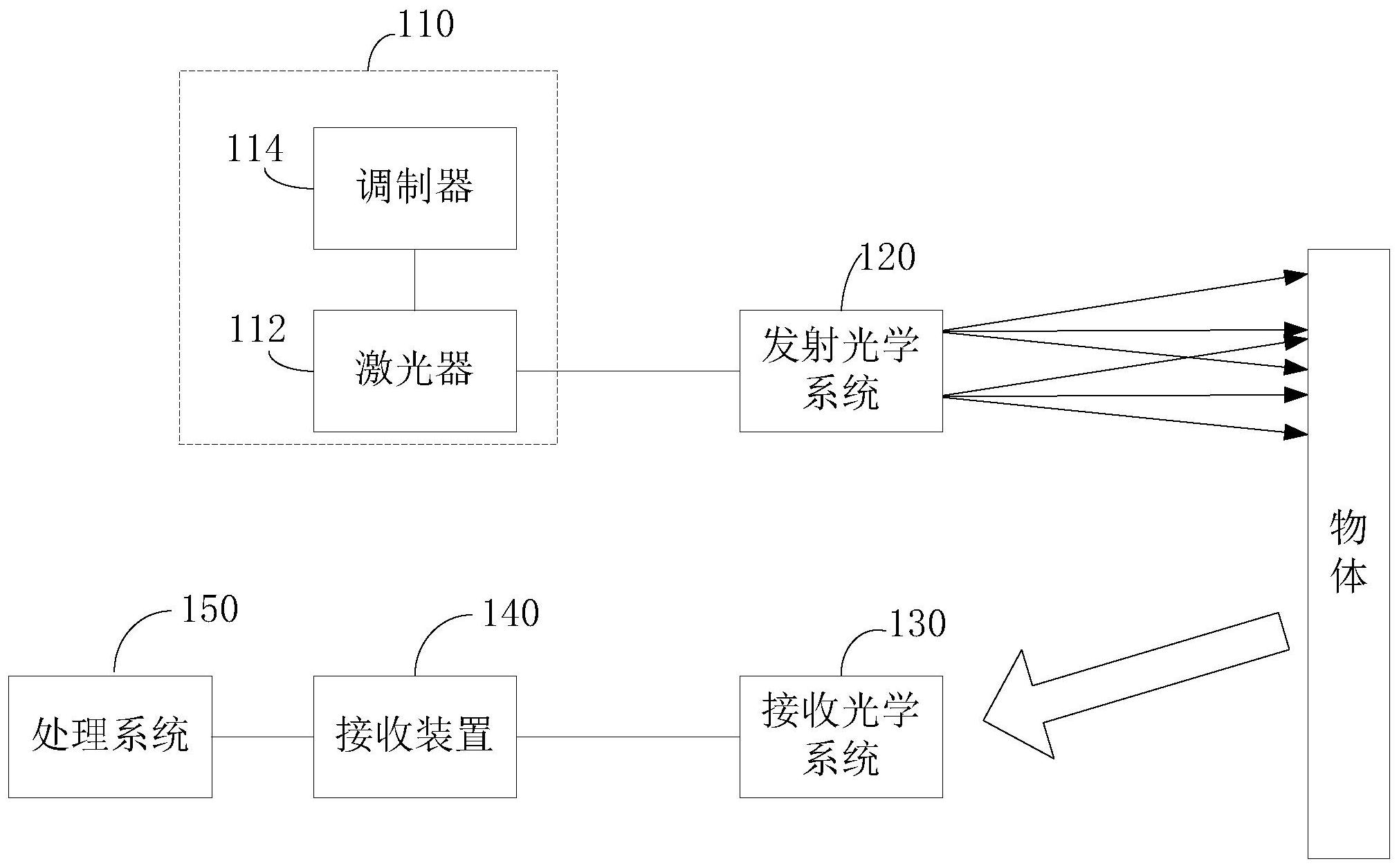
基于此,有必要针对FLASH激光雷不适用于远距离探测的问题,提供一种激光雷达 系统。 一种激光雷达系统,包括: 发射装置,用于发射多组具有不同频率的出射激光; 发射光学系统,用于将所述出射激光射向检测区域; 接收装置,用于接收反射激光;所述反射激光为所述出射激光被检测区域内的物 体反射后的激光; 接收光学系统,用于接收所述反射激光并射向所述接收装置;以及 处理系统,根据各组出射激光的频率,所述出射激光和对应的所述反射激光的相 位差,得到检测区域内物体的距离。 在其中一个实施例中,所述发射装置包括激光器和调制器,所述调制器对所述出 射激光进行调制。 在其中一个实施例中,所述激光器发射两组不同频率的出射激光,第一出射激光 的频率为f1,第二出射激光的频率为f2。 在其中一个实施例中,所述第一出射激光的频率f1和所述第二出射激光的频率f2 之间的频率差值为Δf,Δf大于所述处理系统的信号分辨率。 在其中一个实施例中,所述处理系统根据所述第一出射激光和对应的第一反射激 光的相位差、所述第二出射激光和对应的第二反射激光的相位差、所述第一出射激光和所 述第二出射激光的频率差值Δf,得到检测区域内物体的距离。 在其中一个实施例中,所述调制器对所述第一出射激光以第一载波幅度进行调 制,对所述第二出射激光以第二载波幅度进行调制。 在其中一个实施例中,所述激光器为稳频激光器。 在其中一个实施例中,所述处理系统还根据所述反射激光的频率变化,得到检测 区域内物体的运动速度。 3 CN 111610510 A 说 明 书 2/6 页 在其中一个实施例中,所述调制器采用时分复用的方式对多组所述出射激光分别 进行调制。 在其中一个实施例中,所述激光器发射四组不同频率的出射激光,第一出射激光 和第二出射激光的频率相近,第三出射激光和第四出射激光的频率相近。 上述激光雷达系统,基于连续波调幅的测距原理来进行检测区域内物体的位置信 息如距离的测量,在整个探测过程中是采用了多组不同频率、但频率相近的出射激光来进 行探测,处理系统根据各组出射激光的频率,出射激光以及对应的反射激光的相位差,得到 检测区域内物体的距离。采用多组频率相近的出射激光进行探测,频率差值作为新的测尺 频率,由于频率差值小,能得到较大的测尺长度,因此能大大提高激光雷达的探测距离。相 对于采用单一频率的出射激光,采用多组具有不同频率的出射激光进行探测,可以使得整 个激光雷达系统实现较远距离的探测,从而满足较远探测距离应用场景的使用需求。 附图说明 图1为一实施例中的激光雷达系统的结构框图。 图2为一实施例中的基于连续波幅度调制测距的基本原理图。 图3为检测区域内物体运动时与激光雷达系统的位置关系示意图。











