
技术摘要:
本发明涉及互联网产品技术领域,具体而言,涉及一种扫地机器人定位方法、装置及扫地机器人。所述扫地机器人定位方法包括:选取第一时刻,并获得扫地机器人在所述第一时刻的历史状态量;根据所述历史状态量,预测扫地机器人在第二时刻的第一参考状态量,所述第二时刻位 全部
背景技术:
随着科技的发展,以及人们对生活质量要求的不断增高,智能家居逐渐出现在人 们的日常生活中,其中,尤其具有代表性的扫地机器人越来越受人们的喜爱。扫地机器人在 开机进行清扫工作之前,都需要进行定位,以确定自身的位置状态。但现有技术中的扫地机 器人定位方法普遍存在定位精度不高的弊端,因此,如何提高扫地机器人的定位精度,成为 目前智能家居技术领域亟待解决的技术问题。
技术实现要素:
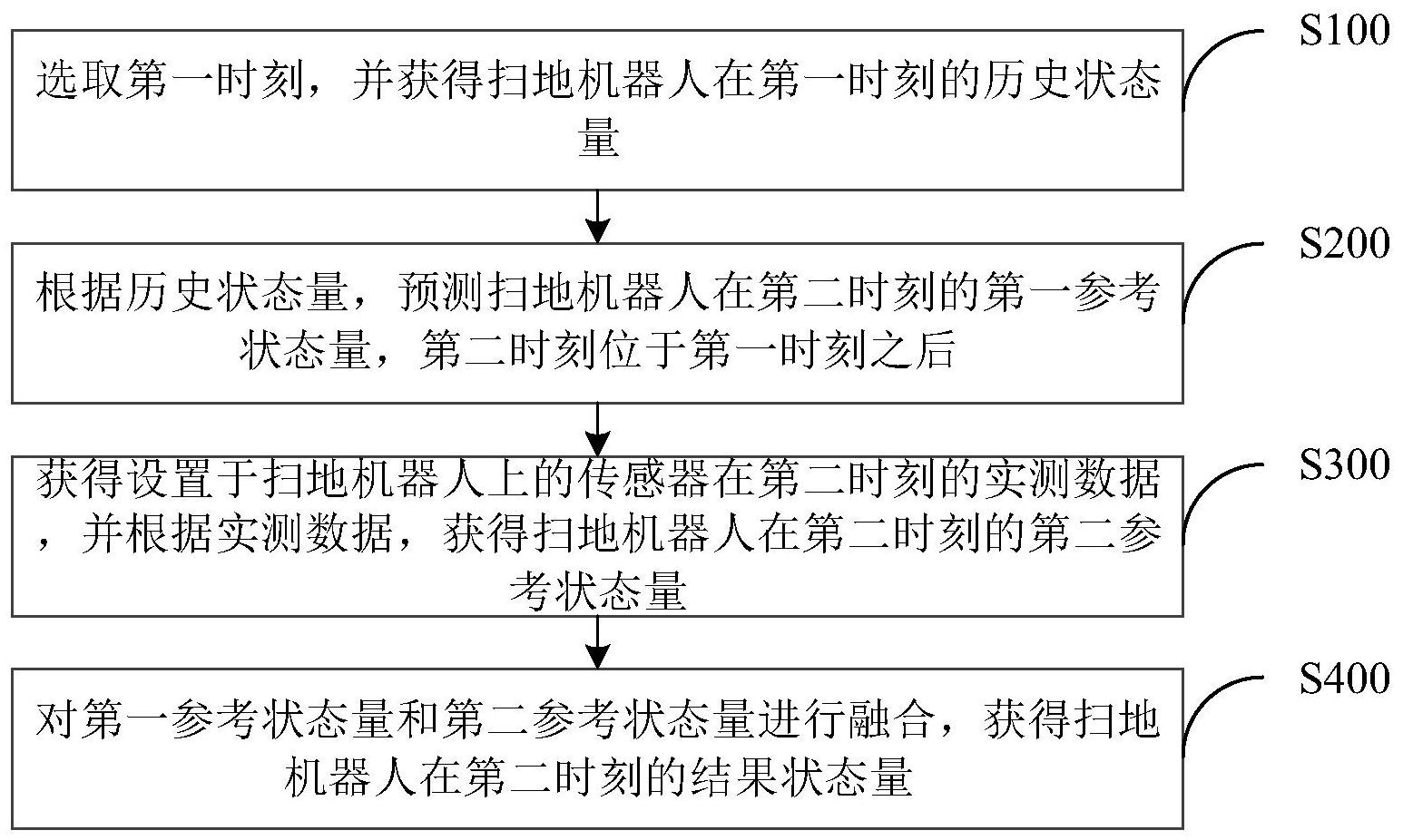
有鉴于此,本发明实施例的目的在于提供一种扫地机器人定位方法、装置及扫地 机器人,以有效改善上述问题。 本发明实施例提供的扫地机器人定位方法,包括: 选取第一时刻,并获得扫地机器人在所述第一时刻的历史状态量; 根据所述历史状态量,预测扫地机器人在第二时刻的第一参考状态量,所述第二 时刻位于所述第一时刻之后; 获得设置于扫地机器人上的传感器在第二时刻的实测数据,并根据所述实测数 据,获得扫地机器人在第二时刻的第二参考状态量; 对所述第一参考状态量和所述第二参考状态量进行融合,获得扫地机器人在第二 时刻的结果状态量。 进一步地,所述根据所述历史状态量,预测扫地机器人在第二时刻的第一参考状 态量,包括: 根据扫地机器人在第二时刻的第一参考状态量与所述历史状态量之间的约束关 系,创建运动方程; 根据所述运动方程和所述历史状态量,预测扫地机器人的所述第一参考状态量。 进一步地,所述历史状态量包括历史位置、历史线速度和历史加速度,所述第一参 考状态量包括第一参考位置,所述运动方程包括第一运动方程; 所述根据扫地机器人在第二时刻的第一参考状态量与所述历史状态量之间的约 束关系,创建运动方程,包括: 根据所述历史位置、所述历史线速度和所述历史加速度与所述第一参考位置的约 束关系创建第一运动方程; 根据所述运动方程和所述历史状态量,预测扫地机器人的所述第一参考状态量, 包括: 根据所述第一运动方程、所述历史位置、所述历史线速度和所述历史加速度,预测 5 CN 111568304 A 说 明 书 2/15 页 扫地机器人的所述第一参考位置。 进一步地,所述历史状态量包括历史姿态和历史角速度,所述第一参考状态量包 括第一参考姿态,所述运动方程包括第二运动方程; 所述根据扫地机器人在第二时刻的第一参考状态量与所述历史状态量之间的约 束关系,创建运动方程,包括: 根据所述第一参考姿态与所述历史姿态和所述历史角速度之间的约束关系创建 第二运动方程; 所述根据所述运动方程、所述历史状态量,预测扫地机器人的所述第一参考状态 量,包括: 根据所述第二运动方程、所述历史姿态和所述历史角速度,预测扫地机器人的所 述第一参考姿态。 进一步地,所述传感器包括左/右车轮码盘、激光雷达、惯性测量装置,所述实测数 据包括所述左/右车轮码盘测量得到的状态增量数据、所述激光雷达测量得到的点云数据, 以及所述惯性测量装置测量得到的实测角速度和实测加速度,所述第二参考状态量包括第 二参考姿态和第二参考位置; 所述获得设置于扫地机器人上的传感器在第二时刻的实测数据,并根据所述实测 数据,获得扫地机器人在第二时刻的第二参考状态量,包括: 获得所述左/右车轮码盘在第二时刻测量得到的增量数据,以及所述激光雷达在 第二时刻测量得到的点云数据,并根据所述增量数据和所述点云数据,获得第二参考位置; 获得所述惯性测量装置在第二时刻测量得到的实测角速度和实测加速度,并根据 所述实测角速度和所述实测加速度,获得第二参考姿态。 进一步地,所述获得所述左/右车轮码盘在第二时刻测量得到的增量数据以及所 述激光雷达在第二时刻测量得到的点云数据,并根据所述增量数据和所述点云数据,获得 第二参考位置,包括: 获得所述左/右车轮码盘在第二时刻测量得到的增量数据,并将获得所述增量数 据的时刻标记为第一数据时刻; 获得所述激光雷达在第二时刻测量得到的点云数据,并将获得所述点云数据的时 刻标记为第二数据时刻,所述第二数据时刻位于所述第一数据时刻之后; 根据所述增量数据和所述点云数据,获得所述第二参考位置,并将获得所述第二 参考位置的时刻标记为第三数据时刻,所述第三数据时刻位于所述第二数据时刻之后。 进一步地,所述获得所述惯性测量装置在第二时刻测量得到的实测角速度和实测 加速度,并根据所述实测角速度和所述实测加速度,获得第二参考姿态,包括: 获得所述惯性测量装置在第二时刻测量得到的实测角速度和实测加速度,并将获 得所述实测角速度和所述实测加速度的时刻标记为第四数据时刻,所述第四数据时刻位于 所述第二数据时刻和所述第三数据时刻之间; 对所述第四数据时刻和所述第三数据时刻之间获得的N个实测角速度和N个实测 加速度进行存储,并为各实测角速度添加第一时刻标签,以及为各实测加速度添加第二时 刻标签,其中,N为整数; 从多个所述第一时刻标签中选取出最靠后的第一时刻标签,作为第一待选取标 6 CN 111568304 A 说 明 书 3/15 页 签,并将与所述第一待选取标签对应的实测角速度作为备用实测角速度,以及从多个所述 第二时刻标签中选取出最靠后的第二时刻标签,作为第二待选取标签,并将与所述第二待 选取标签对应的实测加速度作为备用实测加速度; 根据所述备用实测角速度和所述备用实测加速度,获得第二参考姿态。 进一步地,所述结果状态量包括融合姿态和融合位置; 所述对所述第一参考状态量和所述第二参考状态量进行融合,获得扫地机器人在 第二时刻的结果状态量,包括: 对所述第一参考姿态和所述第二参考姿态进行融合,获得扫地机器人的融合姿 态; 对所述第一参考位置和所述第二参考位置进行融合,获得扫地机器人的融合位 置。 本发明实施例提供的扫地机器人定位装置,包括: 历史状态量获取模块,用于选取第一时刻,并获得扫地机器人在所述第一时刻的 历史状态量; 第一参考状态量获取模块,用于根据所述历史状态量,预测扫地机器人在第二时 刻的第一参考状态量,所述第二时刻位于所述第一时刻之后; 第二参考状态量获取模块,用于获得设置于扫地机器人上的传感器在第二时刻的 实测数据,并根据所述实测数据,获得扫地机器人在第二时刻的第二参考状态量; 结果状态量获取模块,用于对所述第一参考状态量和所述第二参考状态量进行融 合,获得扫地机器人在第二时刻的结果状态量。 进一步地,所述第一参考状态量获取模块,具体用于: 根据扫地机器人在第二时刻的第一参考状态量与所述历史状态量之间的约束关 系,创建运动方程; 根据所述运动方程和所述历史状态量,预测扫地机器人的所述第一参考状态量。 进一步地,所述历史状态量包括历史位置、历史线速度和历史加速度,所述第一参 考状态量包括第一参考位置,所述运动方程包括第一运动方程; 所述第一参考状态量获取模块,又具体用于: 根据所述历史位置、所述历史线速度和所述历史加速度与所述第一参考位置的约 束关系创建第一运动方程; 根据所述第一运动方程、所述历史位置、所述历史线速度和所述历史加速度,预测 扫地机器人的所述第一参考位置。 进一步地,所述历史状态量包括历史姿态和历史角速度,所述第一参考状态量包 括第一参考姿态,所述运动方程包括第二运动方程; 所述第一参考状态量获取模块,还具体用于: 根据所述第一参考姿态与所述历史姿态和所述历史角速度之间的约束关系创建 第二运动方程; 根据所述第二运动方程、所述历史姿态和所述历史角速度,预测扫地机器人的所 述第一参考姿态。 进一步地,所述传感器包括左/右车轮码盘、激光雷达、惯性测量装置,实测数据包 7 CN 111568304 A 说 明 书 4/15 页 括所述左/右车轮码盘测量得到的状态增量数据、所述激光雷达测量得到的点云数据,以及 所述惯性测量装置测量得到的实测角速度和实测加速度,所述第二参考状态量包括第二参 考姿态和第二参考位置; 所述第二参考状态量获取模块,具体用于: 获得所述左/右车轮码盘在第二时刻测量得到的增量数据,以及所述激光雷达在 第二时刻测量得到的点云数据,并根据所述增量数据和所述点云数据,获得第二参考位置; 获得所述惯性测量装置在第二时刻测量得到的实测角速度和实测加速度,并根据 所述实测角速度和所述实测加速度,获得第二参考姿态。 进一步地,所述第二参考状态量获取模块,又具体用于: 获得所述左/右车轮码盘在第二时刻测量得到的增量数据,并将获得所述增量数 据的时刻标记为第一数据时刻; 获得所述激光雷达在第二时刻测量得到的点云数据,并将获得所述点云数据的时 刻标记为第二数据时刻,所述第二数据时刻位于所述第一数据时刻之后; 根据所述增量数据和所述点云数据,获得所述第二参考位置,并将获得所述第二 参考位置的时刻标记为第三数据时刻,所述第三数据时刻位于所述第二数据时刻之后。 进一步地,所述第二参考状态量获取模块,又具体用于: 获得所述惯性测量装置在第二时刻测量得到的实测角速度和实测加速度,并将获 得所述实测角速度和所述实测加速度的时刻标记为第四数据时刻,所述第四数据时刻位于 所述第二数据时刻和所述第三数据时刻之间; 对所述第四数据时刻和所述第三数据时刻之间获得的N个实测角速度和N个实测 加速度进行存储,并为各实测角速度添加第一时刻标签,以及为各实测加速度添加第二时 刻标签,其中,N为整数; 从多个所述第一时刻标签中选取出最靠后的第一时刻标签,作为第一待选取标 签,并将与所述第一待选取标签对应的实测角速度作为备用实测角速度,以及从多个所述 第二时刻标签中选取出最靠后的第二时刻标签,作为第二待选取标签,并将与所述第二待 选取标签对应的实测加速度作为备用实测加速度; 根据所述备用实测角速度和所述备用实测加速度,获得第二参考姿态。 进一步地,所述结果状态量包括融合姿态和融合位置; 所述结果状态量获取模块,具体用于: 对所述第一参考姿态和所述第二参考姿态进行融合,获得扫地机器人的融合姿 态; 对所述第一参考位置和所述第二参考位置进行融合,获得扫地机器人的融合位 置。 本发明实施例提供的扫地机器人,包括处理器、存储器和上述扫地机器人定位装 置,所述扫地机器人定位装置包括一个或多个存储于所述存储器并由所述处理器执行的软 件功能模块。 本发明实施例提供的计算机可读存储介质,其上存储有计算机程序,所述计算机 程序被执行时,可以实现上述扫地机器人定位方法。 本发明实施例提供的扫地机器人定位方法,通过选取第一时刻,并获得扫地机器 8 CN 111568304 A 说 明 书 5/15 页 人在所述第一时刻的历史状态量,根据所述历史状态量,预测扫地机器人在第二时刻的第 一参考状态量,以及获得设置于扫地机器人上的传感器在第二时刻的实测数据,并根据所 述实测数据,获得扫地机器人在第二时刻的第二参考状态量,最后,对所述第一参考状态量 和所述第二参考状态量进行融合,获得扫地机器人在第二时刻的结果状态量。显而易见,通 过本发明实施例获得的结果状态量,不单根据扫地机器人的历史状态量获得,也不单根据 设置于扫地机器人上的传感器在第二时刻的实测数据获得,而是根据扫地机器人的历史状 态量,预测扫地机器人在第二时刻的第一参考状态量,并根据扫地机器人上的传感器在第 二时刻的实测数据,获得扫地机器人在第二时刻的第二参考状态量,最后对第一参考状态 量和第二参考状态量进行融合获得,因此,具有较高的定位精度。 上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段, 而可依照说明书的内容予以实施,并且为了让本发明的上述和其它目的、特征和优点能够 更明显易懂,以下特举本发明的











