
技术摘要:
本发明提供一种机器人的控制系统及其方法,控制系统包括:点云获取模块,实时采集点云图像;指令获取模块,获取机器人的指定对象和指定区域;定位模块,将点云图像、指定对象和当前区域输入定位模型中,以在指定区域内获取包含指定对象的当前区域;移动模块,控制机器 全部
背景技术:
机器人是自动执行工作的机器装置。它既可以接受人类指挥,又可以运行预先编 排的程序,还可以根据以人工智能技术制定的原则进行行动。 目前,往往通过控制者下发的执行指令对机器人进行控制,从而改变机器人的执 行动作。例如,以机器人开门为例,需要控制者实时向机器人发送各种执行指令(例如,需要 控制者控制机器人走到门的位置处,需要控制者控制机器人抬起手臂握住门把手开门),机 器人根据每个执行指令进行执行,而不考虑其他方面的因素。
技术实现要素:
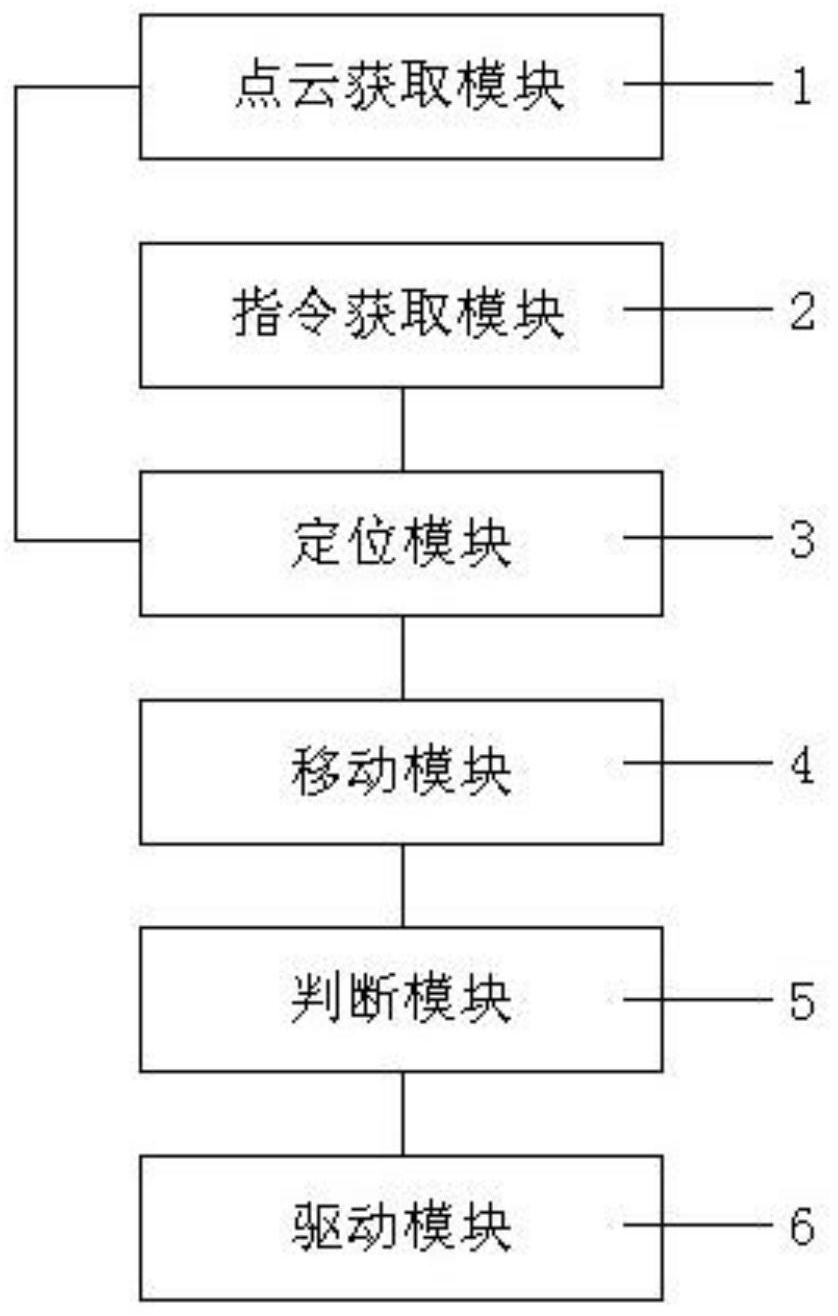
针对现有技术中存在的上述问题,现提供一种旨在不需要控制者实时控制机器人 的控制系统及其方法。 具体技术方案如下: 一种机器人的控制系统,其中,应用于一机器人中,控制系统包括: 点云获取模块,用于实时采集一测量范围内的点云图像; 指令获取模块,用于获取机器人的指定对象和指定对象对应的指定区域; 定位模块,分别与点云获取模块和指令获取模块连接,用于将点云图像、指定对象 和当前区域实时输入预先训练得到的定位模型中,定位模型在指定区域内获取包含指定对 象的当前区域; 移动模块,与定位模块连接,用于控制机器人朝向当前区域移动,并实时获取机器 人与当前区域之间的第一距离; 驱动模块,用于控制机器人停止移动,并控制机器人的机械臂抓握当前区域中的 指定对象; 判断模块,分别与移动模块和驱动模块连接,用于判断第一距离是否到达预设目 标距离,于第一距离未达到预设目标距离时,将当前区域设置为指定区域,并依次控制点云 获取模块、定位模块和移动模块工作,以及于第一距离达到预设目标距离时,控制驱动模块 工作。 优选的,机器人的控制系统,其中,点云获取模块包括: 点云采集单元,根据雷达扫描仪采集测量范围内的第一雷达点云; 点云处理单元,与点云采集单元连接,用于根据第一雷达点云的平滑度、坡度和密 度对第一雷达点云进行筛选处理,以得到点云图像。 优选的,机器人的控制系统,其中,指令获取模块包括: 接收单元,与外接的用户端连接,用于获取用户输入的指定对象和鼠标点击位置; 位置处理单元,与接收单元连接,用于以鼠标点击位置为圆心得到指定对象对应 4 CN 111590575 A 说 明 书 2/6 页 的指定区域。 优选的,机器人的控制系统,其中,指令获取模块包括: 存储单元,存储单元用于存储至少一个指定对象和每个指定对象对应的多个第一 区域; 选择单元,与存储单元连接,用于在所有指定对象中选择一个指定对象; 获取单元,与选择单元连接,根据选择的指定对象在对应的多个第一区域选择一 个第一区域作为指定区域。 优选的,机器人的控制系统,其中,判断模块包括: 第一判断单元,判断第一距离是否到达预设初始距离,于第一距离到达预设初始 距离时,将当前区域设置为指定区域,依次控制定位模块和移动模块进行工作,并于第一距 离未到达预设初始距离时,控制移动模块进行工作。 优选的,机器人的控制系统,其中,判断模块包括: 第二判断单元,判断第一距离是否到达预设目标距离,于第一距离到达预设目标 距离时,将当前区域设置为指定区域,依次控制定位模块和移动模块进行工作,并于第一距 离未到达预设目标距离时,控制移动模块进行工作。 优选的,机器人的控制系统,其中,预设初始距离大于预设目标距离。 优选的,机器人的控制系统,其中,预设目标距离为2米。 优选的,机器人的控制系统,其中,预设初始距离为5米。 还包括一种机器人的控制方法,其中,包括以下步骤: 步骤S1,获取机器人的指定对象和指定对象对应的指定区域; 步骤S2,实时采集一测量范围内的点云图像; 步骤S3,将点云图像、指定对象和当前区域实时输入预先训练得到的定位模型中, 以在指定区域内获取包含指定对象的当前区域; 步骤S4,控制机器人朝向当前区域移动,并实时获取机器人与当前区域之间的第 一距离; 步骤S5,判断第一距离是否到达一预设目标距离; 若是,执行步骤S6; 若否,将当前区域设置为指定区域,返回步骤S2; 步骤S6,控制机器人停止移动,并控制机器人的机械臂抓握当前区域中的指定对 象。 上述技术方案具有如下优点或有益效果:通过逐步缩小当前区域,使得机器人可 以从粗略定位指定对象到精确定位指定对象,进而实现机器人根据单一指令实现自动查找 指定对象,并执行抓握操作。 附图说明 参考所附附图,以更加充分的描述本发明的实施例。然而,所附附图仅用于说明和 阐述,并不构成对本发明范围的限制。 图1为本发明机器人的控制系统的实施例的原理框图; 图2为本发明机器人的控制系统的实施例的点云获取模块的原理框图; 5 CN 111590575 A 说 明 书 3/6 页 图3为本发明机器人的控制系统的实施例的指令获取模块的原理框图一; 图4为本发明机器人的控制系统的实施例的指令获取模块的原理框图二; 图5为本发明机器人的控制系统的实施例的判断模块的原理框图; 图6为本发明机器人的控制方法的实施例的流程图;。











