
技术摘要:
本申请公开了一种驾驶行为评价方法、装置、计算设备和存储介质,属于智能分析技术领域。本申请实施例提供的一种驾驶行为评价方法,计算设备通过获取目标驾驶员的最大频次和第一频次,根据该最大频次和第一频次,确定每个指定驾驶行为的第一权重和第一综合评分;基于第 全部
背景技术:
随着人们对出行安全意识的增强,人们对驾驶员在驾驶过程中的驾驶行为越来越 关注,驾驶员的驾驶行为直接影响到人们的出行安全。因此,对驾驶员的驾驶行为进行合理 评价显得尤为重要。评价驾驶员的驾驶行为,不仅有助于驾驶员所在公司对驾驶员进行业 绩考核,也有助于规范驾驶员的驾驶行为,保证行车安全。 相关技术中主要是通过驾驶行为的最终评分对驾驶员的驾驶行为进行评价。驾驶 行为的最终评分越高,驾驶员的驾驶行为越规范。其中,在确定驾驶行为的最终评分之前, 设定多个指定驾驶行为,例如,抽烟、打电话和未系安全带等,并设定每个指定驾驶行为的 发生频次和评分之间的对应关系。相应的,确定驾驶行为的最终评分的过程可以为:根据目 标驾驶员的驾驶行为数据,确定目标驾驶员的驾驶行为中的每个指定驾驶行为的发生频 次;根据每个指定驾驶行为的发生频次,从发生频次和评分的对应关系中确定该目标驾驶 员对应的每个指定驾驶行为的评分,将该目标驾驶员对应的每个指定驾驶行为的评分的平 均值作为该目标驾驶员的最终评分。 但相关技术的基于平均值的驾驶行为评价方法,存在少数极端值容易影响整体评 价的情况,导致驾驶行为评价的准确率低。
技术实现要素:
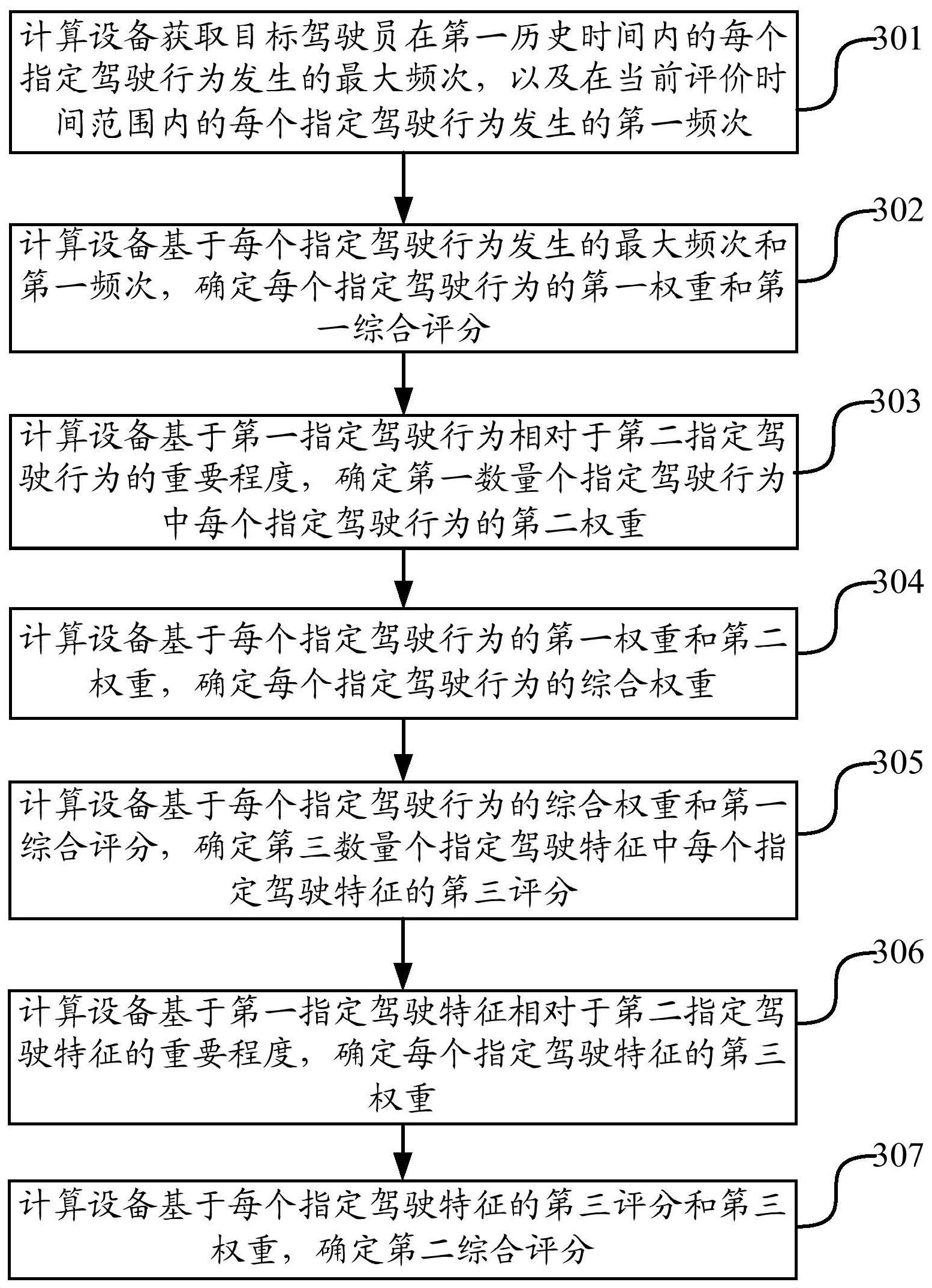
本申请实施例提供了一种驾驶行为评价方法、装置、计算设备和存储介质,能够解 决驾驶行为评价准确率低的问题。所述技术方案如下: 一方面,提供了一种一种驾驶行为评价方法,所述方法包括: 获取目标驾驶员在第一历史时间内的每个指定驾驶行为发生的最大频次,以及在 当前评价时间范围内的每个指定驾驶行为发生的第一频次; 基于所述每个指定驾驶行为发生的最大频次和第一频次,确定所述每个指定驾驶 行为的第一权重和第一综合评分; 基于第一指定驾驶行为相对于第二指定驾驶行为的重要程度,确定第一数量个指 定驾驶行为中每个指定驾驶行为的第二权重,所述第一数量为指定驾驶行为的数量,所述 第一指定驾驶行为和所述第二指定驾驶行为是所述第一数量个指定驾驶行为中任意两个 不同的指定驾驶行为; 基于所述每个指定驾驶行为的第一权重、第一综合评分和第二权重,确定所述目 标驾驶员的驾驶行为的第二综合评分。 在一种可能的实现方式中,所述基于所述每个指定驾驶行为发生的最大频次和第 一频次,确定所述每个指定驾驶行为的第一权重和第一综合评分,包括: 9 CN 111598367 A 说 明 书 2/37 页 基于所述每个指定驾驶行为发生的最大频次和第一频次,确定所述每个指定驾驶 行为在所述当前评价时间范围内的多个评价周期的第一评分; 基于所述每个指定驾驶行为在每个评价周期的第一评分和第二数量,确定所述每 个指定驾驶行为的第一权重,所述第二数量为所述多个评价周期的数量; 基于所述每个指定驾驶行为在所述每个评价周期的第一评分,确定所述每个指定 驾驶行为的第一综合评分。 在另一种可能的实现方式中,所述基于所述每个指定驾驶行为发生的最大频次和 第一频次,确定所述每个指定驾驶行为在所述当前评价时间范围内的多个评价周期的第一 评分,包括: 对于每个指定驾驶行为在每个评价周期,确定所述指定驾驶行为发生的第一频次 与最大频次之间的比值; 根据所述比值,确定所述指定驾驶行为在所述评价周期内被扣除的第二评分; 根据所述评价周期对应的总评分和所述第二评分,确定所述指定驾驶行为在所述 评价周期内的第一评分。 在另一种可能的实现方式中,所述基于所述每个指定驾驶行为在每个评价周期的 第一评分和第二数量,确定所述每个指定驾驶行为的第一权重,包括: 基于所述每个指定驾驶行为在所述每个评价周期的第一评分和所述第二数量,确 定所述每个指定驾驶行为的第一熵值; 基于所述每个指定驾驶行为的第一熵值和所述第一数量,确定所述每个指定驾驶 行为的第一权重。 在另一种可能的实现方式中,所述基于所述每个指定驾驶行为在所述每个评价周 期的第一评分和所述第二数量,确定所述每个指定驾驶行为的第一熵值,包括: 基于所述每个指定驾驶行为在所述每个评价周期的第一评分进行归一化处理,得 到所述每个指定驾驶行为在所述每个评价周期的第一分值; 基于所述每个指定驾驶行为在所述每个评价周期的第一分值和所述第二数量,通 过以下公式一,确定所述每个指定驾驶行为的第一熵值; 公式一: 其中,i为指定驾驶行为的编号,j为评价周期的编号号,Hi为第i个指定驾驶行为 的第一熵值,s为所述第二数量, bij为第i个指定驾驶行为在第j个评价周 期的第一分值。 在另一种可能的实现方式中,所述基于所述每个指定驾驶行为的第一熵值和所述 第一数量,确定所述每个指定驾驶行为的第一权重,包括: 基于所述每个指定驾驶行为的第一熵值和所述第一数量,通过以下公式二,确定 权重矩阵,所述权重矩阵包括所述每个指定驾驶行为的第一权重; 公式二:W=(ωi')1×t 10 CN 111598367 A 说 明 书 3/37 页 其中,W为所述权重矩阵, ωi'为第i个指定驾驶行为的第一权重, Hi为第i个指定驾驶行为的第一熵值,且 t为所述第一数量; 从所述权重矩阵中确定所述每个指定驾驶行为的第一权重。 在另一种可能的实现方式中,所述基于第一指定驾驶行为相对于第二指定驾驶行 为的重要程度,确定第一数量个指定驾驶行为中每个指定驾驶行为的第二权重,包括: 基于所述第一指定驾驶行为相对于所述第二指定驾驶行为的重要程度,构造第一 判断矩阵; 基于所述第一判断矩阵,确定所述第一判断矩阵的矩阵阶数和最大特征值; 基于所述矩阵阶数,从矩阵阶数和随机一致性指标的对应关系中,确定所述第一 判断矩阵的随机一致性指标; 基于所述第一判断矩阵的矩阵阶数、所述最大特征值和所述随机一致性指标,确 定所述第一数量个指定驾驶行为中每个指定驾驶行为的第二权重。 在另一种可能的实现方式中,所述基于所述第一判断矩阵的矩阵阶数、所述最大 特征值和所述随机一致性指标,确定所述第一数量个指定驾驶行为中每个指定驾驶行为的 第二权重,包括: 基于所述第一判断矩阵的矩阵阶数、所述最大特征值和所述随机一致性指标,确 定所述第一判断矩阵的一致性比例; 当所述一致性比例小于比例阈值时,确定所述最大特征值对应的所述第一数量个 第一特征向量; 对所述第一数量个第一特征向量进行归一化处理,得到所述第一数量个第二特征 向量; 将所述第一数量个第二特征向量的数值确定为所述第一数量个指定驾驶行为的 第二权重。 在另一种可能的实现方式中,所述基于所述每个指定驾驶行为的第一权重、第一 综合评分和第二权重,确定所述目标驾驶员的驾驶行为的第二综合评分,包括: 基于所述每个指定驾驶行为的第一权重和第二权重,确定所述每个指定驾驶行为 的综合权重; 基于所述每个指定驾驶行为的综合权重和第一综合评分,确定第三数量个指定驾 驶特征中每个指定驾驶特征的第三评分,所述第三数量为指定驾驶特征的数量,所述每个 指定驾驶特征对应多个指定驾驶行为; 基于第一指定驾驶特征相对于第二指定驾驶特征的重要程度,确定所述每个指定 驾驶特征的第三权重,所述第一指定驾驶特征和所述第二指定驾驶特征是所述第三数量个 指定驾驶特征中任意两个不同的指定驾驶特征; 基于所述每个指定驾驶特征的第三评分和第三权重,确定所述第二综合评分。 在另一种可能的实现方式中,所述基于所述每个指定驾驶行为的第一权重和第二 权重,确定所述每个指定驾驶行为的综合权重,包括: 对于每个指定驾驶行为,确定所述指定驾驶行为的第一权重和所述第二权重的乘 11 CN 111598367 A 说 明 书 4/37 页 积,得到第一数值; 将所述每个指定驾驶行为的第一数值进行求和,得到第二数值; 确定所述第一数值与所述第二数值的比值,得到所述指定驾驶行为的综合权重。 在另一种可能的实现方式中,所述基于所述每个指定驾驶特征的第三评分和第三 权重,确定所述第二综合评分,包括: 将所述每个指定驾驶特征的第三评分和第三权重进行加权求和,得到所述第二综 合评分;或者, 将所述每个指定驾驶特征的第三评分和第三权重进行加权求和,得到第三综合评 分,将所述第三综合评分与第二历史时间内的所述目标驾驶员的驾驶行为的多个第四综合 评分进行融合,得到所述第二综合评分。 在另一种可能的实现方式中,所述将所述第三综合评分与第二历史时间内的所述 目标驾驶员的驾驶行为的多个第四综合评分进行融合,得到所述第二综合评分,包括: 通过目标高斯混合模型,确定所述第三综合评分对应的第一概率和所述多个第四 综合评分对应的多个第二概率; 对所述第一概率和所述多个第二概率进行归一化处理,分别得到所述第三综合评 分对应的第四权重和所述多个第四综合评分对应的多个第五权重,一个第四综合评分对应 一个第五权重; 将所述第三综合评分、所述第四权重、所述多个第四综合评分和所述多个第五权 重进行加权求和,得到所述第二综合评分。 在另一种可能的实现方式中,所述方法还包括: 对初始高斯混合模型的多个第一模型参数进行初始化,得到多个第二模型参数; 确定所述初始高斯混合模型中分模型的个数,设定收敛阈值和最大迭代次数; 基于所述多个第二模型参数,确定第一分模型对所述第三综合评分和所述多个第 四综合评分的第一响应度; 基于所述第一响应度、所述第三综合评分和所述多个第四综合评分,确定多个第 三模型参数; 当所述多个第三模型参数满足所述收敛阈值或达到所述最大迭代次数时,输出所 述多个第三模型参数,得到所述目标高斯混合模型; 当所述多个第三模型参数不满足所述收敛阈值或未达到所述最大迭代次数时,基 于所述多个第三模型参数、所述第三综合评分和所述多个第四综合评分,确定多个第四模 型参数,直到多个模型参数满足所述收敛阈值或达到所述最大迭代次数,输出满足所述收 敛阈值或达到所述最大迭代次数时对应的多个模型参数,得到所述目标高斯混合模型。 在另一种可能的实现方式中,所述通过目标高斯混合模型,确定所述第三综合评 分对应的第一概率和所述多个第四综合评分对应的多个第二概率,包括: 通过所述目标高斯混合模型和以下公式三,确定所述第一概率和所述多个第二概 率; 公式三:M=P(yv|θk)*2*yconst 12 CN 111598367 A 说 明 书 5/37 页 其中, M为所述第一概率 或第二概率,φ(yv|θk)为第k个分模型的高斯分布密度,yv为所述第三综合评分或第四综合 评分,yconst为常数,μk为第一参数,σ2k 为第二参数,αk为第三参数,R为所述分模型的个数,k ≤R。 另一方面,提供了一种驾驶行为评价装置,所述装置包括: 获取模块,用于获取目标驾驶员在第一历史时间内的每个指定驾驶行为发生的最 大频次,以及在当前评价时间范围内的每个指定驾驶行为发生的第一频次; 第一确定模块,用于基于所述每个指定驾驶行为发生的最大频次和第一频次,确 定所述每个指定驾驶行为的第一权重和第一综合评分; 第二确定模块,用于基于第一指定驾驶行为相对于第二指定驾驶行为的重要程 度,确定第一数量个指定驾驶行为中每个指定驾驶行为的第二权重,所述第一数量为指定 驾驶行为的数量,所述第一指定驾驶行为和所述第二指定驾驶行为是所述第一数量个指定 驾驶行为中任意两个不同的指定驾驶行为; 第三确定模块,用于基于所述每个指定驾驶行为的第一权重、第一综合评分和第 二权重,确定所述目标驾驶员的驾驶行为的第二综合评分。 在一种可能的实现方式中,所述第一确定模块,还用于基于所述每个指定驾驶行 为发生的最大频次和第一频次,确定所述每个指定驾驶行为在所述当前评价时间范围内的 多个评价周期的第一评分;基于所述每个指定驾驶行为在每个评价周期的第一评分和第二 数量,确定所述每个指定驾驶行为的第一权重,所述第二数量为所述多个评价周期的数量; 基于所述每个指定驾驶行为在所述每个评价周期的第一评分,确定所述每个指定驾驶行为 的第一综合评分。 在另一种可能的实现方式中,所述第一确定模块,还用于对于每个指定驾驶行为 在每个评价周期,确定所述指定驾驶行为发生的第一频次与最大频次之间的比值;根据所 述比值,确定所述指定驾驶行为在所述评价周期内被扣除的第二评分;根据所述评价周期 对应的总评分和所述第二评分,确定所述指定驾驶行为在所述评价周期内的第一评分。 在另一种可能的实现方式中,所述第一确定模块,还用于基于所述每个指定驾驶 行为在所述每个评价周期的第一评分和所述第二数量,确定所述每个指定驾驶行为的第一 熵值;基于所述每个指定驾驶行为的第一熵值和所述第一数量,确定所述每个指定驾驶行 为的第一权重。 在另一种可能的实现方式中,所述第一确定模块,还用于基于所述每个指定驾驶 行为在所述每个评价周期的第一评分进行归一化处理,得到所述每个指定驾驶行为在所述 每个评价周期的第一分值; 基于所述每个指定驾驶行为在所述每个评价周期的第一分值和所述第二数量,通 过以下公式一,确定所述每个指定驾驶行为的第一熵值; 公式一: 其中,i为指定驾驶行为的编号,j为评价周期的编号,Hi为第i个指定驾驶行为的 13 CN 111598367 A 说 明 书 6/37 页 第一熵值,s为所述第二数量, bij为第i个指定驾驶行为在第j个评价周期 的第一分值。 在另一种可能的实现方式中,所述第一确定模块,还用于基于所述每个指定驾驶 行为的第一熵值和所述第一数量,通过以下公式二,确定权重矩阵,所述权重矩阵包括所述 每个指定驾驶行为的第一权重; 公式二:W=(ωi')1×t 其中,W为所述权重矩阵, ωi'为第i个指定驾驶行为的第一权重, Hi为第i个指定驾驶行为的第一熵值,且 t为所述第一数量; 从所述权重矩阵中确定所述每个指定驾驶行为的第一权重。 在另一种可能的实现方式中,所述第二确定模块,还用于基于所述第一指定驾驶 行为相对于所述第二指定驾驶行为的重要程度,构造第一判断矩阵;基于所述第一判断矩 阵,确定所述第一判断矩阵的矩阵阶数和最大特征值;基于所述矩阵阶数,从矩阵阶数和随 机一致性指标的对应关系中,确定所述第一判断矩阵的随机一致性指标;基于所述第一判 断矩阵的矩阵阶数、所述最大特征值和所述随机一致性指标,确定所述第一数量个指定驾 驶行为中每个指定驾驶行为的第二权重。 在另一种可能的实现方式中,所述第二确定模块,还用于基于所述第一判断矩阵 的矩阵阶数、所述最大特征值和所述随机一致性指标,确定所述第一判断矩阵的一致性比 例;当所述一致性比例小于比例阈值时,确定所述最大特征值对应的所述第一数量个第一 特征向量;对所述第一数量个第一特征向量进行归一化处理,得到所述第一数量个第二特 征向量;将所述第一数量个第二特征向量的数值确定为所述第一数量个指定驾驶行为的第 二权重。 在另一种可能的实现方式中,所述第三确定模块,还用于基于所述每个指定驾驶 行为的第一权重和第二权重,确定所述每个指定驾驶行为的综合权重;基于所述每个指定 驾驶行为的综合权重和第一综合评分,确定第三数量个指定驾驶特征中每个指定驾驶特征 的第三评分,所述第三数量为指定驾驶特征的数量,所述每个指定驾驶特征对应多个指定 驾驶行为;基于第一指定驾驶特征相对于第二指定驾驶特征的重要程度,确定所述每个指 定驾驶特征的第三权重,所述第一指定驾驶特征和所述第二指定驾驶特征是所述第三数量 个指定驾驶特征中任意两个不同的指定驾驶特征;基于所述每个指定驾驶特征的第三评分 和第三权重,确定所述第二综合评分。 在另一种可能的实现方式中,所述第二确定模块,还用于对于每个指定驾驶行为, 确定所述指定驾驶行为的第一权重和所述第二权重的乘积,得到第一数值;将所述每个指 定驾驶行为的第一数值进行求和,得到第二数值;确定所述第一数值与所述第二数值的比 值,得到所述指定驾驶行为的综合权重。 在另一种可能的实现方式中,所述第二确定模块,还用于将所述每个指定驾驶特 征的第三评分和第三权重进行加权求和,得到所述第二综合评分;或者,将所述每个指定驾 驶特征的第三评分和第三权重进行加权求和,得到第三综合评分,将所述第三综合评分与 14 CN 111598367 A 说 明 书 7/37 页 第二历史时间内的所述目标驾驶员的驾驶行为的多个第四综合评分进行融合,得到所述第 二综合评分。 在另一种可能的实现方式中,所述第二确定模块,还用于通过目标高斯混合模型, 确定所述第三综合评分对应的第一概率和所述多个第四综合评分对应的多个第二概率;对 所述第一概率和所述多个第二概率进行归一化处理,分别得到所述第三综合评分对应的第 四权重和所述多个第四综合评分对应的多个第五权重,一个第四综合评分对应一个第五权 重;将所述第三综合评分、所述第四权重、所述多个第四综合评分和所述多个第五权重进行 加权求和,得到所述第二综合评分。 在另一种可能的实现方式中,所述装置还包括: 第四确定模块,用于对初始高斯混合模型的多个第一模型参数进行初始化,得到 多个第二模型参数;确定所述初始高斯混合模型中分模型的个数,设定收敛阈值和最大迭 代次数;基于所述多个第二模型参数,确定第一分模型对所述第三综合评分和所述多个第 四综合评分的第一响应度;基于所述第一响应度、所述第三综合评分和所述多个第四综合 评分,确定多个第三模型参数;当所述多个第三模型参数满足所述收敛阈值或达到所述最 大迭代次数时,输出所述多个第三模型参数,得到所述目标高斯混合模型;当所述多个第三 模型参数不满足所述收敛阈值或未达到所述最大迭代次数时,基于所述多个第三模型参 数、所述第三综合评分和所述多个第四综合评分,确定多个第四模型参数,直到多个模型参 数满足所述收敛阈值或达到所述最大迭代次数,输出满足所述收敛阈值或达到所述最大迭 代次数时对应的多个模型参数,得到所述目标高斯混合模型。 在另一种可能的实现方式中,所述第二确定模块,还用于通过所述目标高斯混合 模型和以下公式三,确定所述第一概率和所述多个第二概率; 公式三:M=P(yv|θk)*2*yconst 其中, M为所述第一概率 或第二概率,φ(yv|θk)为第k个分模型的高斯分布密度,yv为所述第三综合评分或第四综合 评分,y 为常数,μ为第一参数,σ2const k k 为第二参数,αk为第三参数,R为所述分模型的个数,k ≤R。 另一方面,提供了一种计算设备,所述计算设备包括: 处理器和存储器,所述存储器中存储有至少一条指令、至少一段程序、代码集或指 令集,所述指令、所述程序、所述代码集或所述指令集由所述处理器加载并执行以实现第一 方面任一项所述的驾驶行为评价方法中所执行的操作。 另一方面,提供了一种计算机可读存储介质,所述计算机可读存储介质中存储有 至少一条指令、至少一段程序、代码集或指令集,所述指令、所述程序、所述代码集或所述指 令集由处理器加载并执行以实现上述驾驶行为评价方法中任一项所执行的操作。 本申请实施例提供的技术方案带来的有益效果是: 本申请实施例提供的驾驶行为评价方法,计算设备通过获取目标驾驶员在第一历 史时间内的每个指定驾驶行为发生的最大频次,以及在当前评价时间范围内的每个指定驾 驶行为发生的第一频次,根据该最大频次和第一频次,确定每个指定驾驶行为的第一权重 和第一综合评分。计算设备还基于第一指定驾驶行为相对于第二指定驾驶行为的重要程 15 CN 111598367 A 说 明 书 8/37 页 度,确定第一数量个指定驾驶行为中每个指定驾驶行为的第二权重。计算设备根据每个指 定驾驶行为的第一权重、第一综合评分和第二权重,确定目标驾驶员的驾驶行为的第二综 合评分。该方法通过第一综合评分和两种不同的权重,确定第二综合评分,避免了少数极端 值影响整体评价的情况,提高了驾驶行为评价的准确率。 附图说明 图1是本申请实施例提供的一种驾驶行为评价的应用场景的示意图; 图2是本申请实施例提供的一种驾驶行为评价方法的流程图; 图3是本申请实施例提供的一种驾驶行为评价方法的流程图; 图4是本申请实施例提供的一种确定分模型个数的示意图; 图5是本申请实施例提供的一种确定第一概率和多个第二概率的示意图; 图6是本申请实施例提供的另一种确定第一概率和多个第二概率的的示意图; 图7是本申请实施例提供的一种驾驶行为评价装置的结构示意图; 图8是本申请实施例提供的一种计算设备的结构框图。











