
技术摘要:
本发明公开了一种基于机器视觉的客车列车自动铰接方法及系统,摄像头自动对焦并实时获取无畸变的视频流;开发板对视频流的图像进行处理,得到前后客车的距离、相对方向角和坐标信息;客车编组控制器根据处理得到的信息,控制从车调整车辆直至前后车对齐,完成自动铰接 全部
背景技术:
城市交通中,早晚高峰及平峰对运力需求矛盾突出。公交企业为了解决运力不平 衡只能在高峰时段增派车辆和驾驶员,或者更换大运力车辆,造成车辆和人员的浪费。能自 由编组和分散独立运行的客车列车在高峰期间进行编组运行,编组列车运行只需要一个驾 驶员。在平峰期间,进行分散独立运行,一个驾驶员驾驶一辆分散独立运行车辆。 客车列车区别于传统铰接公交车,铰接公交车大多是两节车厢,运力有限,且不能 自由编组,第二节车厢也无动力系统。客车列车可实现多个车辆的自由编组。编组后,车厢 打通,乘客可自由穿过每节车厢。客车列车非常适用于快速公交系统(BRT),可作为介于轨 道交通与常规公交之间的新型公共客运系统,解决早晚高峰和平峰运力需求极不平衡的问 题,同时大大降低人力成本、车辆运行成本等,体现绿色公交的理念。 当前现有的列车对接技术主要通过人工对接安装、固定轨道对齐接口再进行电气 或机械手段固定等方法,存在装卸不便、运作场景限制高等缺点。对于装卸灵活性便易性要 求极高的公路客车的铰接,传统的方法无法满足其需求。 当前机器视觉和图像处理技术蓬勃发展,具有数据信息丰富、处理手段多、设备安 装简单、性能稳定等优点,能够支撑客车列车自动铰接的功能需求。
技术实现要素:
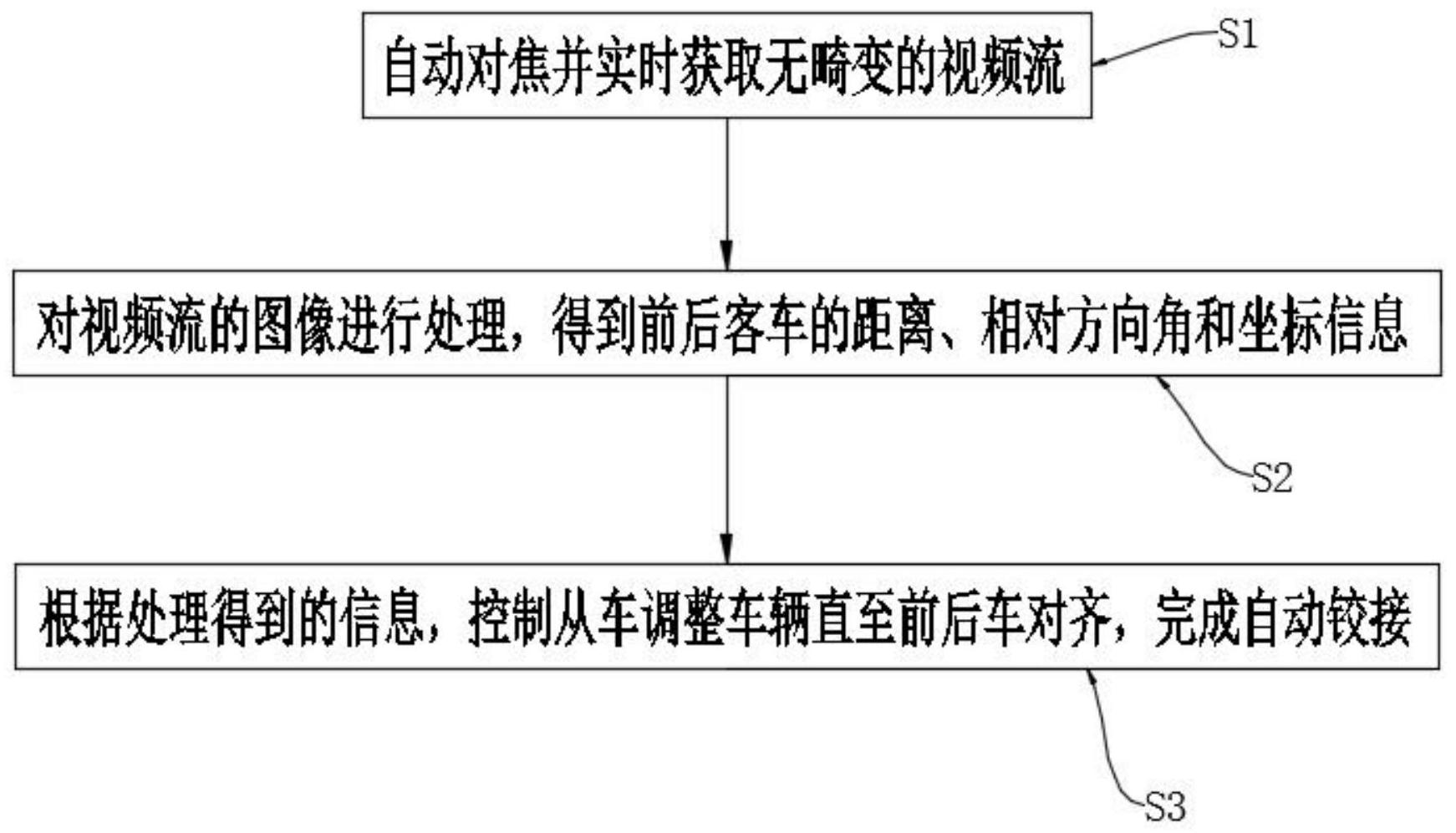
为了解决以上问题,本发明的目的是提供一种基于机器视觉的客车列车自动铰接 方法及系统,前车和后车连接灵活便易,以满足客车列车自由编组的需求。 为了实现以上目的,本发明采用的技术方案: 一种基于机器视觉的客车列车自动铰接方法,包括以下步骤, 自动对焦并实时获取无畸变的视频流; 对视频流的图像进行处理,得到前后客车的距离、相对方向角和坐标信息; 根据处理得到的信息,控制从车调整车辆直至前后车对齐,完成自动铰接。 进一步的是,所述对视频流的图像进行处理包括以下步骤: S21、使用摄像头标定,获得摄像头内参矩阵、外参矩阵、畸变系数; S22、创建标记,并安装设备与标记; S23、对标记进行检测; S24、进行姿势估计,得到旋转矩阵和平移矩阵; S25、根据旋转矩阵和平移矩阵求出前后车相对方向角、距离、坐标信息。 进一步的是,所述S21包括以下步骤: S211、在不同位置和角度拍摄打印好的棋盘标定板15-20张; 4 CN 111598950 A 说 明 书 2/9 页 S212、对拍摄的标定图片进行灰度化; S213、对灰度化后的每张标定图片提取内角点信息; S214、对灰度化后的每张标定图片提取亚像素角点信息; S215、进行摄像头标定,得到内参数矩阵、外参矩阵、畸变系数; S216、对摄像头的标定结果进行评价,若偏差在合理范围之内则进行下一步骤。 进一步的是,所述S22包括以下步骤: S221、创建ArUco标记; S222、将摄像头固定在车辆前方挡风玻璃的上方中心位置,调试摄像头直至光轴 平行于地平线; S223、将创建的ArUco标记打印,并使ArUco标记图片的中心对准摄像头光轴垂直 通过的高度。 进一步的是,所述S23包括以下步骤: S231、检测候选标记: 从自适应阈值分割标记开始,并从阈值图像中提取轮廓,丢弃非凸形或不近似于 正方形的轮廓; S232、分析候选标记内部编码以确认摄像头获取到的是否为正确ArUco标记: 应用透视变换以获得规范形式的标记;使用Otsu对规范图像进行阈值处理以分离 白色和黑色位;根据标记大小和边框大小将图像划分为不同的单元,并对每个单元上的黑 色或白色像素进行计数,以确定其是白色位还是黑色位;分析这些位以确定标记是否属于 特定词典,并采用纠错技术。 进一步的是,所述S24包括以下步骤: S241、将世界坐标系标记的四个角点按照顺时针使用points.push_back函数压入 points中,左上角为第一个点; S242、使用OpenCV中的PNP求解函数solvePnP; S243、使用Rodrigues函数将旋转向量变换成旋转矩阵,将平移向量转换成平移矩 阵。 进一步的是,所述S25包括以下步骤: S251、根据旋转矩阵求出前车和后车的相对方向角; S252、根据旋转矩阵和平移矩阵求出前后车的距离信息; S253、设摄像头焦点为原点,以光轴所在直线为y轴,以通过原点且与y轴垂直的直 线为x轴,构建水平面上的位置坐标系。 进一步的是,所述前后车的距离信息采用如下公式计算: Pcam=RPworld t 式中,Pcam代表物体在摄像头坐标系下的坐标,Pworld代表物体在世界坐标系下的坐 标,R和t分别为旋转矩阵和平移矩阵,当Pcam=0时,Pworld的z轴坐标即为前后车的距离信息。 进一步的是,所述对标记进行检测采用cv::aruco::detectMarkers函数进行;所 述姿势估计使用PnP算法进行。 基于上述铰接方法,本发明还提供了一种基于机器视觉的客车列车自动铰接系 统,包括摄像头、开发板和客车编组控制器; 5 CN 111598950 A 说 明 书 3/9 页 所述摄像头用于自动对焦并获取无畸变的视频流; 所述开发板用于接收摄像头的视频流信息,对视频流的图像进行处理,得到前后 客车的距离、相对方向角和坐标信息; 所述客车编组控制器用于接收开发板处理得到的信息,控制从车调整车辆直至前 后车对齐,完成自动铰接。 本发明的有益效果: 相较传统列车铰接设备,本发明提高客车列车在编组过程中的易操作性,通过便 于安装和使用的机器视觉系统进行铰接,能够降低扩展列车过程中设备安装的难度。 相较传统列车铰接技术,本发明能够降低运行场景要求的限制,也无需人工参与 即可自动完成对接工作,针对高峰和平峰的切换效率和便易度都得到了提高。 相较传统铰接公交车,采用本发明能够以较低的功耗完成多辆列车的编组运行, 摆脱了其扩展运力有限的缺点。 附图说明 图1为本发明方法的示意图; 图2为本发明对视频流的图像进行处理的示意图; 图3为本发明系统的示意图; 图4为摄像头坐标系; 图5为本发明标定板的示意图; 图6为灰度化后的图片; 图7为提取内角点信息的图片; 图8为提取亚像素角点信息的图片; 图9为生成的ArUco标记; 图10为带标记的原图像; 图11为检测到的标记图像; 图12为识别步骤中被拒绝的标记图像; 图13为截取其中的一帧图像; 图14为本发明客车列车的铰接机构图。











