
技术摘要:
本发明公开一种半潜式海洋剖面观测智能机器人,包括固定底板、柱体外壳与电池仓,所述电池仓固定安装在固定底板的上部中间位置,所述固定底板的两侧外表面均活动安装有缓冲侧板,所述缓冲侧板的底部内侧活动安装有转动轴,所述缓冲侧板通过转动轴和缓冲侧板活动对接, 全部
背景技术:
该半潜式海洋剖面观测智能机器,是一种利用潜水方式,对海洋内的生物及环境 进行观测操作的一种半潜式海洋观测设备,利用该半潜式海洋剖面观测智能机器可以实时 统计观测信息,方便科研人员研究海洋生态环境。 对比文件CN110641659A公开的一种自避风浪的海洋监测机器人,包括机器人本体 包括防水外壳、推进电机、内部控制单元、电源和必要的警报传感器,包括信号缆收放装置 和上浮气囊以及信号缆,上浮气囊中包含风浪检测和信号收发器、特定功能的传感器,上浮 气囊与信号缆进行密闭式连接。本发明具有海洋信息监测,自动躲避风浪的优点,另外,可 伸缩式信号缆结构能够在大风浪的恶劣环境下实时监测海面信息和接发外界信息,并可保 证机器人主体在风浪结束后自动浮至海面继续工,与本发明相比,其不具有辅助转向结构, 降低了其使用时的灵活度。 现有的半潜式海洋剖面观测智能机器人在使用过程中存在一定的弊端,传统半潜 式海洋剖面观测智能机器人不具有辅助转向结构,使得传统半潜式海洋剖面观测智能机器 人无法在水中进行多角度的转向操作,降低了其观测使用时的灵活度,令其无法适用不同 地形,降低了其使用时的灵活度;其次传统半潜式海洋剖面观测智能机器人不具有缓冲保 护结构,使得半潜式海洋剖面观测智能机器人在海中行驶时,容易受到海浪冲击而出现损 坏现象,降低了其使用寿命;同时传统半潜式海洋剖面观测智能机器人不具有拼接式组合 固定结构,降增加了半潜式海洋剖面观测智能机器人维护及拆卸操作时的难度,给使用者 带来一定的不利影响。
技术实现要素:
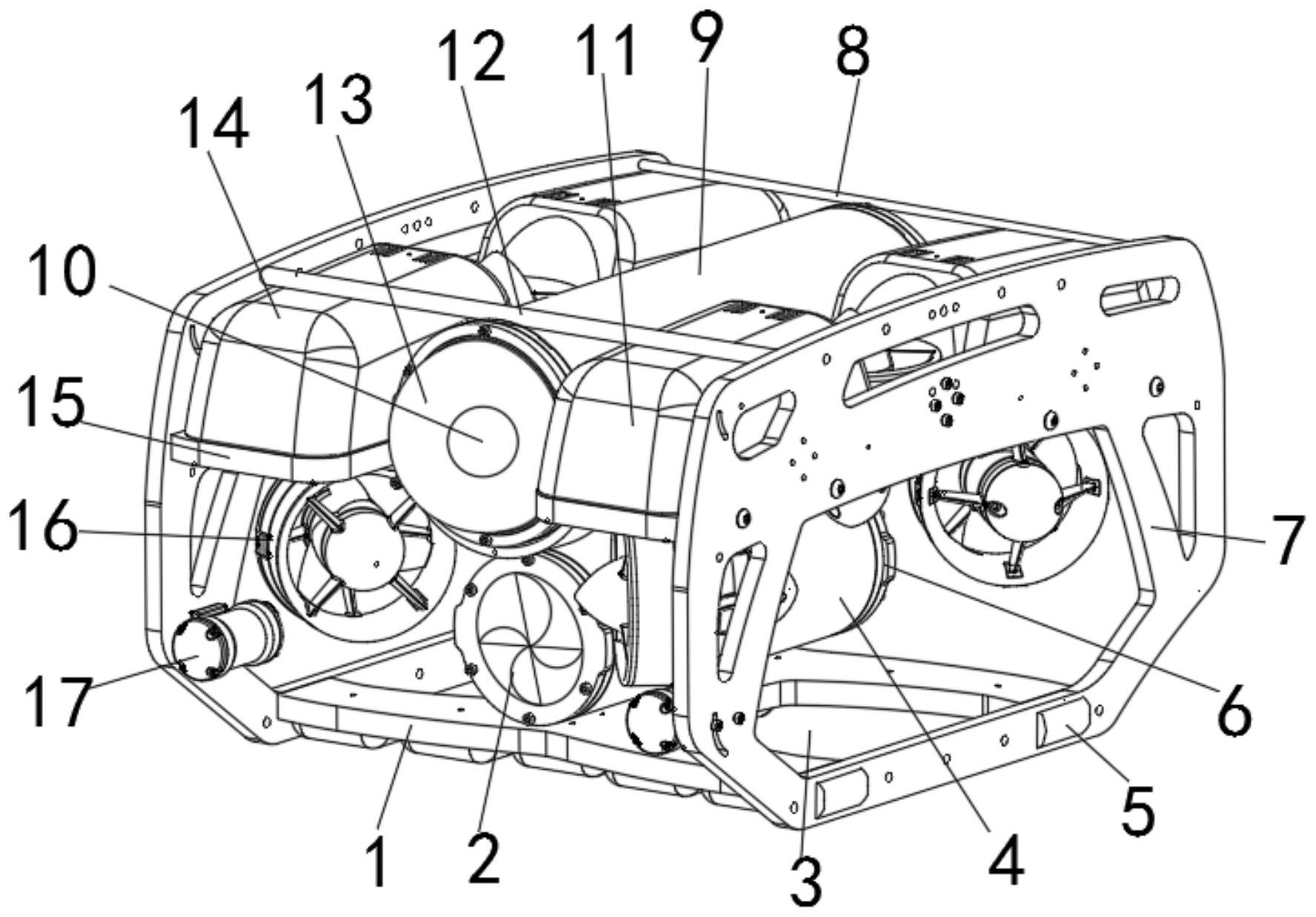
为了克服传统半潜式海洋剖面观测智能机器人不具有辅助转向结构,使得传统半 潜式海洋剖面观测智能机器人无法在水中进行多角度的转向操作,降低了其观测使用时的 灵活度,令其无法适用不同地形,降低了其使用时的灵活度;其次传统半潜式海洋剖面观测 智能机器人不具有缓冲保护结构,使得半潜式海洋剖面观测智能机器人在海中行驶时,容 易受到海浪冲击而出现损坏现象,降低了其使用寿命;同时传统半潜式海洋剖面观测智能 机器人不具有拼接式组合固定结构,降增加了半潜式海洋剖面观测智能机器人维护及拆卸 操作时的难度,而提供一种半潜式海洋剖面观测智能机器人。 本发明的目的通过以下技术方案实现: 一种半潜式海洋剖面观测智能机器人,包括固定底板、柱体外壳与电池仓,所述电 池仓固定安装在固定底板的上部中间位置,所述固定底板的两侧外表面均活动安装有缓冲 侧板,所述缓冲侧板的底部内侧活动安装有转动轴,所述缓冲侧板通过转动轴和缓冲侧板 4 CN 111591415 A 说 明 书 2/6 页 活动对接,所述缓冲侧板的上部内表面活动套接有第二横杆和第一横杆,所述缓冲侧板的 上部内侧贯穿开设有对接槽,所述第二横杆、第一横杆和缓冲侧板之间均通过对接槽对接 固定,所述第二横杆和第一横杆的内表面均活动套接有弹簧柱,且第二横杆和第一横杆的 外表面均固定安装有第一卡销,所述第二横杆和第一横杆的外表面靠近缓冲侧板的一侧均 活动套接有移动卡套,所述第二横杆和第一横杆的外表面靠近缓冲侧板的另一侧均固定安 装有第二卡销,所述柱体外壳固定安装在电池仓的上端外表面,所述柱体外壳的两侧靠近 第二横杆和第一横杆的下部固定安装有两组第一卡罩和第二卡罩,所述第一卡罩和第二卡 罩的下端外表面均固定安装有固定托板,所述固定托板的底部活动安装有转向涡轮。 作为本发明的进一步方案,所述过对接槽的横截面结构为梯形结构,所述转向涡 轮的上端中部固定安装有对接卡柱,对接卡柱的外表面固定套接有外套护罩,对接卡柱的 上端外表面设有转向电机,转向电机的侧边外表面固定安装有对接卡盘,转向电机通过对 接卡盘和固定托板对接固定,所述转向电机和转向涡轮之间通过对接卡柱对接固定,对接 卡柱的内侧套接有转向轴。 作为本发明的进一步方案,所述转向涡轮的内侧中部位置固定安装有第一电机, 且第一电机的前端外表面固定安装有弧形顶头,所述第一电机的侧边活动安装有第二旋 叶。 作为本发明的进一步方案,所述固定底板的上端外表面中间位置固定安装有弧形 卡座,且固定底板通过弧形卡座和电池仓对接固定,弧形卡座上活动安装有侧旋卡环,弧形 卡座和侧旋卡环之间通过转轴活动连接,侧旋卡环的一端外表面固定安装有固定卡扣。 作为本发明的进一步方案,所述缓冲侧板和固定底板的内侧均贯穿开设有镂空 槽,所述第一卡罩、第二卡罩和缓冲侧板之间均通过螺栓对接固定,所述柱体外壳的前端外 表面固定安装有半球护罩,所述柱体外壳和电池仓的后端外表面均固定安装有固定卡盖, 所述柱体外壳的前端内侧中部位置固定安装有摄像头。 作为本发明的进一步方案,所述缓冲侧板的侧边外表面靠近第一卡罩和第二卡罩 的下部均固定安装有探照灯,所述缓冲侧板的外表面靠近第一卡罩和第二卡罩的一侧均固 定安装有升降涡轮,所述升降涡轮的内侧活动安装有第一旋叶,且升降涡轮和缓冲侧板之 间通过对接栓板对接固定。 作为本发明的进一步方案,所述固定底板的底部外表面活动安装有转向翻板,且 转向翻板的内侧中部位置固定套接有对接转杆,对接转杆的外表面靠近转向翻板上部活动 套接有固定盘,对接转杆通过固定盘和固定底板对接固定,所述对接转杆的顶端设有第二 电机。 作为本发明的进一步方案,所述固定底板的下端外表面固定安装有三组缓冲气 垫,固定托板的底部内侧开设有连接槽,第一卡罩和第二卡罩的顶部内侧均设有排气槽。 作为本发明的进一步方案,所述电池仓的前端内侧活动安装有推进旋叶,且电池 仓的内部设有电机,固定卡盖上设有固定栓帽,第二旋叶和第一旋叶的侧边均为斜面结构。 作为本发明的进一步方案,该机器人的具体使用操作步骤为: 步骤一,利用弧形卡座和侧旋卡环之间的转轴开启侧旋卡环,将电池仓卡在弧形 卡座上,闭合侧旋卡环后,利用固定卡扣固定闭合后的侧旋卡环,从而使得电池仓安装在固 定底板上; 5 CN 111591415 A 说 明 书 3/6 页 步骤二,将缓冲侧板及固定底板放置入水体内,利用升降涡轮内第一旋叶的转动, 使得柱体外壳的摄像头下潜至水面以下,通过启动转向电机,使得转向电机利用对接卡柱 驱动转向涡轮,从而调节转向涡轮的角度,同时利用第一电机驱动第二旋叶,使得柱体外壳 在水面下转动,调节摄像头的拍摄角度,当四组转向涡轮处于同一角度时,利用第二旋叶的 转动,驱动设备前进; 步骤三,利用固定底板和缓冲侧板之间的转动轴,当缓冲侧板受到撞击时,缓冲侧 板利用对接槽,配合第二横杆和第一横杆在弹簧柱的作用下向内移动,同时在缓冲侧板移 动后,利用弹簧柱复位缓冲侧板,同时利用柱体外壳的电机驱动推进旋叶转动,使得推进旋 叶驱动柱体外壳移动,同时利用第二电机配合对接转杆驱动转向翻板,调节柱体外壳的移 动方向。 本发明的有益效果: 1、通过设置转向涡轮和对接卡柱,当该半潜式海洋剖面观测智能机器人在水中需 要进行转向操作时,使用者可以通过启动转向涡轮上的转向电机,使得转向电机利用对接 卡柱驱动转向涡轮,从而调节转向涡轮的角度,同时利用第一电机驱动第二旋叶,可以配合 转动后的转向涡轮,使得柱体外壳在水面下进行转向操作,利用对四组转向涡轮的角度调 节,当两组转向涡轮保持同一角度,另两组转向涡轮保持进行同步旋转调节后,可以令观测 智能机器人在前进的同时进行侧身转向,其次在四组转向涡轮转动至不同角度时,可以令 观测智能机器人在狭小的空间内进行自转调节,同时在四组转向涡轮保持同一角度时,可 以对观测智能机器人起到辅助推进作用,提升其前进速度,利用对接卡柱上的外套护罩,可 以避免转向涡轮在转动时出现缠绕现象,同时利用弧形顶头可以降低转向涡轮推进时的阻 力,利用转向涡轮和对接卡柱的设置,使得该半潜式海洋剖面观测智能机器人具有辅助转 向结构,提升其水下操作时的灵活度。 2、通过设置缓冲侧板,当该半潜式海洋剖面观测智能机器人,在半潜状态下受到 海浪冲击时,利用固定底板和缓冲侧板之间的转动轴,可以在观测智能机器人侧边的缓冲 侧板受到撞击时,使得缓冲侧板利用对接槽,配合第二横杆和第一横杆在弹簧柱的作用下 向内移动,利用弹簧柱弹性支撑缓冲侧板,使得缓冲侧板具有弹性缓冲结构,同时在缓冲侧 板受到冲击后,利用弹簧柱复位缓冲侧板,使得缓冲侧板和固定底板之间保持垂直状态,令 其可以进行二次缓冲操作,利用缓冲侧板配合弹簧柱的设置,使得该半潜式海洋剖面观测 智能机器人的侧边结构具有缓冲保护结构,可以有效降低其在半潜状态下的冲击力,提升 其安全性。 3、通过设置弧形卡座和侧旋卡环,当使用者需要对该观测智能机器人的零部件进 行安装及拆卸操作时,使用者可以利用弧形卡座和侧旋卡环之间的转轴开启侧旋卡环,将 电池仓卡在弧形卡座上,利用弧形卡座上部的弧形结构,可以使得柱体式电池仓的安装更 加牢固,闭合侧旋卡环后,利用固定卡扣固定闭合后的侧旋卡环,从而使得电池仓安装在固 定底板上,利用弧形卡座和侧旋卡环形成的卡扣式固定结构,可以对设备的零部件进行组 合式更换操作,从而令其拆卸安装操作更加便捷。 4、通过转向翻板和推进旋叶的设置,当该半潜式海洋剖面观测智能机器人的主驱 动结构出现故障现象时,利用电池仓的电机驱动推进旋叶转动,使得其产生推力,同时利用 第二电机配合对接转杆驱动转向翻板,调节柱体外壳的移动方向,利用转向翻板和推进旋 6 CN 111591415 A 说 明 书 4/6 页 叶的设置,使得该观测智能机器人具有备用推进结构,提升使用时的稳定性。 附图说明 下面结合附图对本发明作进一步的说明。 图1是本发明一种半潜式海洋剖面观测智能机器人的整体结构示意图。 图2是本发明一种半潜式海洋剖面观测智能机器人的局部结构图。 图3是本发明一种半潜式海洋剖面观测智能机器人的底部结构图。 图4是本发明一种半潜式海洋剖面观测智能机器人转向涡轮的整体结构图。 图5是本发明一种半潜式海洋剖面观测智能机器人的局部平面结构图。 图6是本发明一种半潜式海洋剖面观测智能机器人转向翻板的整体结构图。 图中:1、固定底板;2、推进旋叶;3、镂空槽;4、电池仓;5、转动轴;6、固定卡盖;7、缓 冲侧板;8、第一横杆;9、柱体外壳;10、摄像头;11、第一卡罩;12、第二横杆;13、半球护罩; 14、第二卡罩;15、固定托板;16、转向涡轮;17、探照灯;18、转向翻板;19、对接转杆;20、弧形 卡座;21、第一旋叶;22、升降涡轮;23、对接栓板;24、缓冲气垫;25、连接槽;26、固定栓帽; 27、弧形顶头;28、第二旋叶;29、第一电机;30、转向轴;31、对接卡柱;32、对接卡盘;33、转向 电机;34、外套护罩;35、固定卡扣;36、侧旋卡环;37、第一卡销;38、弹簧柱;39、移动卡套; 40、固定盘;41、第二电机;42、对接槽;43、第二卡销。











