
技术摘要:
本发明公开一种减小电动车用电机输出扭矩振动的控制方法,本发明根据相应的车辆、电机输入信号并构建相应的算法精确判断车辆实际工况,以查表选用合适的滤波系数与扭矩补偿系数,通过不同工况下电机各转速段的防扭振RC滤波系数与转矩补偿系数,并根据RC滤波前后获得的 全部
背景技术:
永磁同步电机以其高能量密度、高效率等优点在电动车上获得了广泛应用,当电 动汽车处于起步、加速、Tip-in/Tip-out(急踩油门/缓踩油门)以及减速制动等非稳定工况 下,传动系统受到随机冲击性干扰力而受激振动,产生非预期的动载荷引起扭振,直接影响 车辆驾驶平顺性、传动系部件的工作可靠性与耐久性。因此,需要开发扭矩波动抑制功能以 消除电动汽车行驶过程中非预期动态载荷带来的冲击以及提高传动系部件的使用寿命。现 有电机输出扭矩振动控制是通过对电机实际输出扭矩与整车控制器需求扭矩进行匹配,并 利用实时动态扭矩补偿来减弱非预期动态载荷带来的整车冲击,实时动态扭矩补偿是通过 计算固定的带通滤波后的电机转速与未滤波的实测电机转速之差波动乘以固定的扭矩补 偿系数得到振动减小转矩补偿值,然后根据电机实际调制率对所获得的减小振动转矩进一 步修正,得到最终的电机输出扭矩振动补偿值。但该电机输出扭矩振动控制补偿系数只是 针对固定工况,当车辆驾驶工况发生变化时,单维度的扭矩振动控制补偿系数不能更好的 实现车辆复杂工况下的驾驶平顺性要求。
技术实现要素:
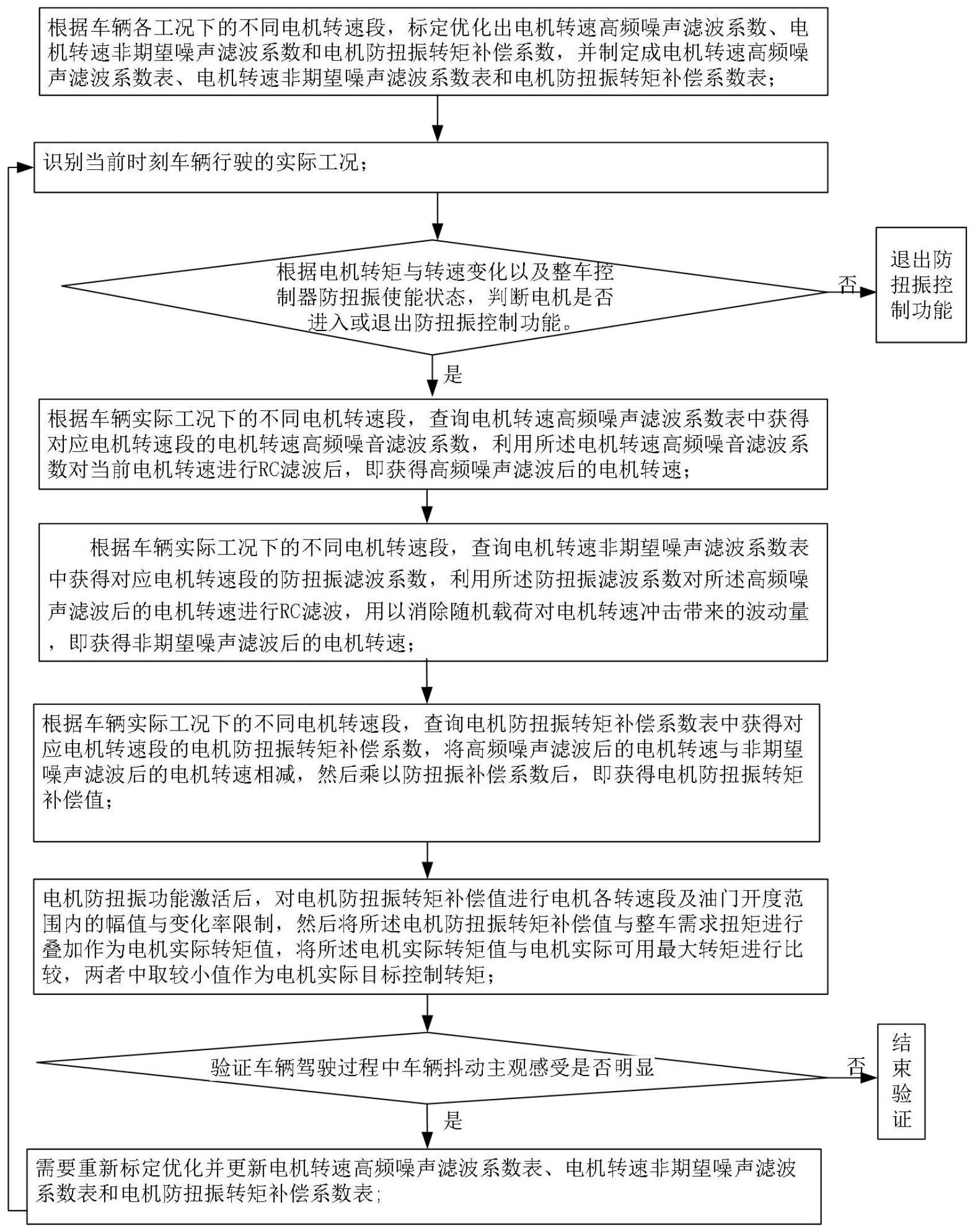
本发明的目的是提供一种减小电动车用电机输出扭矩振动的控制方法,能抑制扭 矩振动,使得整车驾驶更平顺、安全。 为实现上述目的,本发明提供了一种减小电动车用电机输出扭矩振动的控制方 法,其特征在于,包括以下步骤: (S1)根据车辆各工况下的不同电机转速段,标定优化出用于抑制扭矩振动的电机 转速高频噪声滤波系数、电机转速非期望噪声滤波系数和电机防扭振转矩补偿系数,并制 定成电机转速高频噪声滤波系数表、电机转速非期望噪声滤波系数表和电机防扭振转矩补 偿系数表; (S2)识别当前时刻车辆行驶的实际工况; (S3)根据电机转矩与转速变化以及整车控制器防扭振使能状态,判断电机是否进 入或退出防扭振控制功能,若进入防扭振控制功能,则继续执行步骤(S4)-(S8);否则,退出 防扭振控制功能; (S4)根据车辆实际工况下的不同电机转速段,查询电机转速高频噪声滤波系数表 中获得对应电机转速段的电机转速高频噪音滤波系数,利用所述电机转速高频噪音滤波系 数对当前电机转速进行RC滤波后,即获得高频噪声滤波后的电机转速; (S5)根据车辆实际工况下的不同电机转速段,查询电机转速非期望噪声滤波系数 表中获得对应电机转速段的防扭振滤波系数,利用所述防扭振滤波系数对所述高频噪声滤 4 CN 111591144 A 说 明 书 2/6 页 波后的电机转速进行RC滤波,用以消除随机载荷对电机转速冲击带来的波动量,即获得非 期望噪声滤波后的电机转速; (S6)根据车辆实际工况下的不同电机转速段,查询电机防扭振转矩补偿系数表中 获得对应电机转速段的电机防扭振转矩补偿系数,将高频噪声滤波后的电机转速与非期望 噪声滤波后的电机转速相减,然后乘以防扭振补偿系数后,即获得电机防扭振转矩补偿值; (S7)电机防扭振功能激活后,对电机防扭振转矩补偿值进行电机各转速段及油门 开度范围内的幅值与变化率限制,然后将所述电机防扭振转矩补偿值与整车需求扭矩进行 叠加作为电机实际转矩值,将所述电机实际转矩值与电机实际可用最大转矩进行比较,两 者中取较小值作为电机实际目标控制转矩; (S8)验证车辆驾驶过程中车辆抖动主观感受是否明显,若抖动明显,则需要重新 标定优化电机转速高频噪声滤波系数表、电机转速非期望噪声滤波系数表和电机防扭振转 矩补偿系数表,更新后返回步骤(S2);若抖动不明显,结束验证。 进一步,识别当前时刻车辆行驶的实际运行工况,具体步骤包括:电机控制器采集 至少包括电机转矩、电机转速、车速、油门踏板开度、制动开关状态和档位作为输入信号,并 计算出电机转矩变化率、电机转速变化率和车速变化率,然后分析判定出电机控制器运行 任务周期内车辆的实际工况并输出识别结果。 进一步,对车辆的实际工况的判定包括以下内容: 若车速等于0、电机转矩和电机转速均为0,且档位为空挡,此时为停车工况; 若车速不等于0,电机转速小于等于第一预设值,油门踏板开度为关闭,制动开关 状态为关闭,此时工况为蠕行起步工况; 若车速不等于0,电机转速小于等于第一预设值,油门踏板开度为关闭,制动开关 状态为开启,此时工况为蠕行制动工况; 若油门踏板开度为开启,车速变化率大于0,此时工况为加速行驶工况; 若油门踏板开度为开启,车速变化率小于等于第一预设车速变化率波动范围,此 时工况为匀速行驶工况; 若制动开关状态为关闭或开启,车速变化率小于0,此时工况为减速制动工况。 进一步,将各工况分为三大类工况,电机转速高频噪声滤波系数和非期望噪声滤 波系数是根据这三大类工况对应不同电机转速段下标定出的,三大类工况分别为:第一类 工况包括停车、蠕行起步和蠕行制动;第二类工况包括加速、减速和制动;第三类工况包括 匀速行驶。 进一步,电机是否进入或退出防扭振控制功能的判定需执行以下步骤: (S21)判断当前时刻电机转矩与前一时刻电机转矩之差的绝对值是否小于第二预 设值,若是,则执行步骤(S22),否则,则执行步骤(S23); (S22)判断根据当前时刻电机转矩与前一时刻电机转矩的时间之差的绝对值得出 的时间周期是否大于第一预设时长值,若是,则整车控制器向电机发出电机防扭振控制使 能信号,进而电机进入防扭振控制功能;否则,电机退出防扭振控制功能; (S23)判断当前时刻电机转矩与前一时刻电机转矩之差的绝对值是否大于等于第 二预设值且电机转速不等于0,若是,则电机退出防扭振控制功能;否则,整车控制器向电机 发出电机防扭振控制使能信号,进而电机进入防扭振控制功能。 5 CN 111591144 A 说 明 书 3/6 页 进一步,所述高频噪声滤波后的电机转速的公式为:VG=(1-H)×V'G-(nmot×H);其 中,设定H为高频噪声滤波系数,VG为当前通过高频噪声滤波后的电机转速,V'G为前一时刻 通过高频噪声滤波后的电机转速值,nmot为当前电机转速,H系数需限制在0-1之间; 所述非期望噪声滤波后的电机转速的公式为:VF=(1-M)×V'F-(VG×M);其中,设 定M为非期望噪声滤波系数,VF为通过非期望噪声滤波后的电机转速,V'F为前一时刻通过通 过非期望噪声滤波后的电机转速。 进一步,所述电机防扭振转矩补偿系数表、电机转速高频噪声滤波系数表和非期 望噪声滤波系数表是车辆行驶在不同工况条件下通过实车驾评以消除电机转速抖动对驾 驶主观感受的不平顺影响而不断优化得出的。 进一步,在车辆抖动明显的情况下,应先标定优化电机防扭振转矩补偿系数,优化 后如果无明显抖动,更新电机防扭振转矩补偿系数表;如果优化后还存在明显抖动,再标定 优化电机转速高频噪声滤波系数和非期望噪声滤波系数,优化后无明显抖动,更新电机转 速高频噪声滤波系数表和非期望噪声滤波系数表,如果还存在明显抖动,按照前述标定优 化顺序重复。 本发明与现有技术相比较具有以下优点: 本发明提供的电机防扭振的控制方法,通过判断车辆实际工况来制定不同电机转 速段下的高频滤波系数、防扭振滤波系数以及防扭振转矩补偿系数,根据影响整车驾驶平 顺性的电机转速波动来补偿电机防扭振转矩值,并通过对所补偿转矩的幅值及其变化率进 行限制来抑制电机扭矩,从而实现整车驾驶更平顺、安全。 附图说明 图1为本发明减小电动车用电机输出扭矩振动的控制方法的流程图。











