
技术摘要:
本发明公开一种人机协作分选系统的作业方法,其包括工件数据发送步骤和接收步骤,在发送步骤中,其在工件移动至相机视野外之后再将工件数据发送给机器人来进行工件抓取,发送前后两次选中的工件数据的时间间隔较长,机器人可以依照发送的先后顺序依次收到工件数据;在 全部
背景技术:
人机协作分选系统一般包括传送带(设有用于记录传送带坐标的编码器)、相机、 处理装置、显示器及机器人,机器人包括机械臂和用于控制机械臂动作的控制系统,相机采 集工件的图像,处理装置对图像进行处理后由显示器显示,显示器接受分选工人的操作并 将选中工件的信息传送至处理装置,而处理装置(工控机)将显示器传送的工件数据进行处 理后需要发送给控制系统,控制系统再依据工件数据控制机械臂进行工件抓取。 现有技术中,处理装置通常是每获取到一工件数据便发送给控制系统,正常情况 下,控制系统会先收到处理装置前一时间发送的工件数据,再收到处理装置后一时间发送 的工件数据。但是,在工件数据的发送频率(选中操作频率)过高时,由于前后两工件数据间 隔时间极短,若机器人的网络硬件或者网络优化设计较差,控制系统可能会同时收到处理 装置前后发送的两个工件数据,将无法正常进行数据解析,导致无法进行工件抓取。 此外,机器人一般都自带传送带跟踪抓取功能,其控制系统在捕捉到相机发送的 拍照完成信号后,记录传送带的当前编码器值,然后等待显示器发送工件数据,具体流程如 图6所示。由图6可知,机器人作业过程中,主要存在等待拍照完成信号及等待显示器发送工 件数据两个耗时等待。等待拍照完成信号的时间极短,相对于一帧图像的时间基本可忽略。 而等待显示器发送工件数据时,由于会受分选工人操作影响,具体耗时长短则变得未知;在 此过程中,控制系统将一直处于等到状态,也就使得相机不会进行下一帧图像的拍摄。这就 导致了显示器上前后两帧图像之间的时间间隔变得随机,造成卡顿现象,导致分选工人难 以适应操作,且作业效率低下。
技术实现要素:
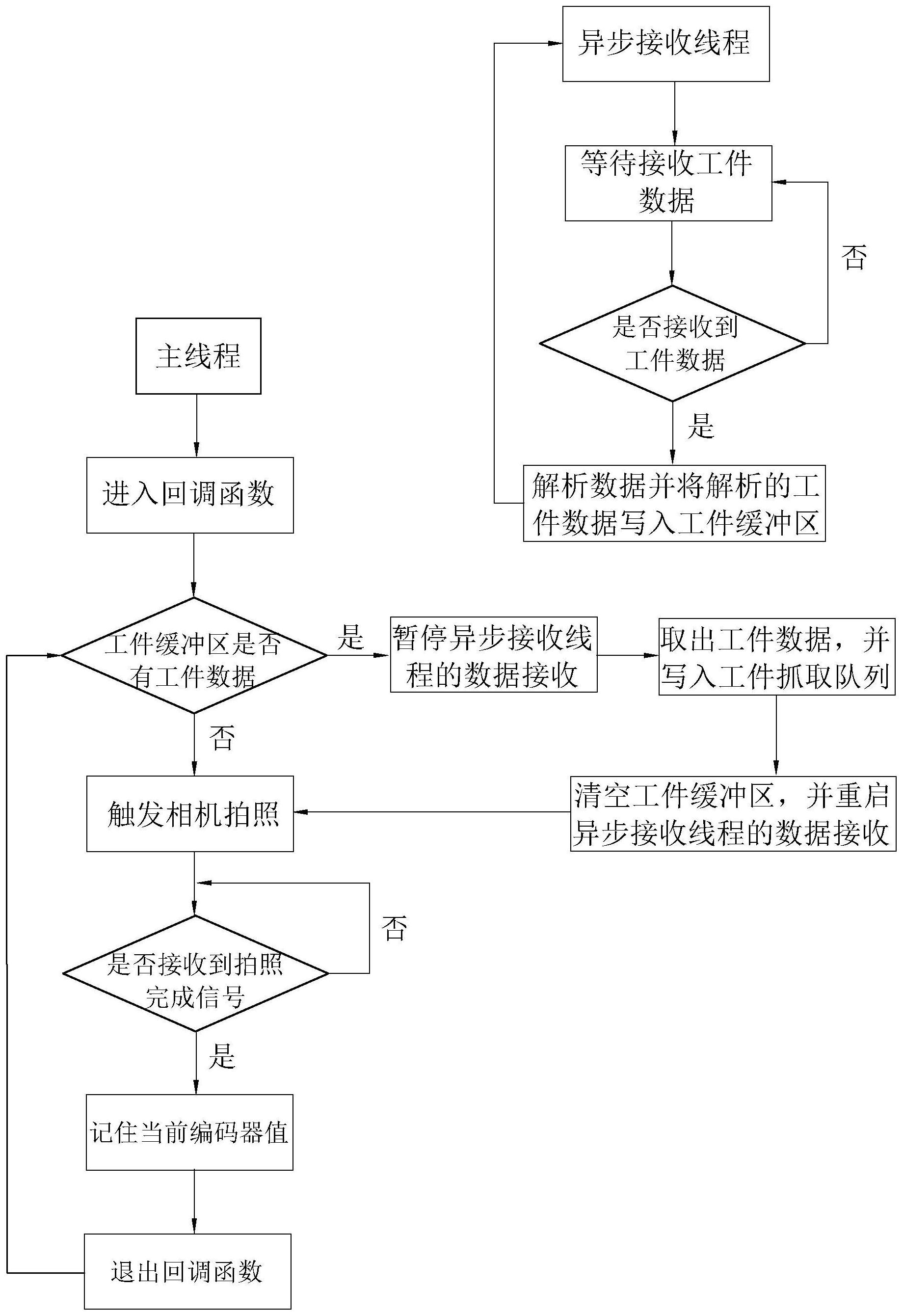
本发明的目的在于提供一种人机协作分选系统的作业方法及人机协作分选系统, 以可以适用于前后两帧图像之间时间间隔非常短时的作业情景,进而可以在显示器以视频 流的方式(高速的图片流)显示图像。 为了实现上述目的,本发明公开了一种人机协作分选系统的作业方法,所述人机 协作分选系统包括用于输送工件的传送带、用于获取工件的图像的相机、用于显示所述图 像并接受选择操作的显示器、处理装置及用于抓取被选中工件的机器人。所述人机协作分 选系统的作业方法包括工件数据发送步骤和工件数据接收步骤。其中,所述工件数据发送 步骤具体为:将在所述显示器中被选中且位于相机视野内的工件数据写入预先定义的视野 内工件队列;实时计算所述视野内工件队列中各工件的坐标,将实时坐标处于相机视野外 的工件数据从所述视野内工件队列中移除并写入预先定义的视野外工件队列;将所述视野 外工件队列中的工件数据发送给所述机器人进行工件抓取。所述工件数据接收步骤具体 4 CN 111570332 A 说 明 书 2/6 页 为:通过异步接收线程接收所述工件数据,并将所述工件数据解析后写入工件缓冲区;通过 主线程判断所述工件缓冲区中是否存在工件数据,若是,执行:暂停所述异步接收线程的工 件数据接收,取出所述工件缓冲区中的工件数据并写入工件抓取队列以抓取工件;若否,触 发所述相机拍照。 具体地,所述工件数据发送步骤中,在将所述视野外工件队列的工件数据发送给 所述机器人之后,还执行:清空所述视野外工件队列。 具体地,所述工件数据发送步骤还包括:预先定义一所述视野内工件队列和一所 述视野外工件队列。 具体地,所述工件数据接收步骤中,在取出所述工件缓冲区中的工件数据之后,还 包括:重启所述异步接收线程的工件数据接收。 较佳地,所述人机协作分选系统的作业方法还包括:实时跟踪被选中的工件在每 一帧图像中的坐标,并标记该被选中的工件。 具体地,所述“标记所述工件”具体为:在每一帧图像圈中该被选中的工件。 具体地,所述“实时跟踪被选中的工件在每一帧图像中的坐标”具体为:标定机器 人和传送带,获得传送带坐标转换成机器人坐标的第一转换矩阵M0,其中,传送带上设有用 于记录传送带坐标的编码器;标定相机和传送带,获得相机像素坐标转换成传送带坐标的 第二转换矩阵M1及传送带坐标转换成相机像素坐标的第三转换矩阵M2;依据下式获得工件 在当前帧图像的坐标P:P=(P’*M1 △d)*M2;其中,P’为工件在上一帧图像中被选中时的对 应坐标,△d为当前编码器值与上一帧图像锁存的编码器值的平移矩阵,所述编码器值由第 一转换矩阵M0和编码器发送的传送带坐标获得。 为了实现上述目的,本发明还公开了一种人机协作分选系统,包括传送带、相机、 显示器、处理装置及机器人,其中,所述传送带用于承载和输送工件;所述相机用于采集工 件的图像;所述显示器用于显示所述图像和接受选择操作,并将选中的工件数据发送至所 述处理装置;所述处理装置执行:接收所述显示器发送的工件数据;将位于相机视野内的所 述工件数据写入预先定义的视野内工件队列;实时计算所述视野内工件队列中各工件的坐 标,将实时坐标处于相机视野外的工件数据从所述视野内工件队列中移除并写入预先定义 的视野外工件队列;将所述视野外工件队列中的工件数据发送给所述机器人进行工件抓 取;所述机器人包括控制系统和机械臂,所述控制系统执行:通过异步接收线程接收所述工 件数据,并将所述工件数据解析后写入工件缓冲区;通过主线程判断所述工件缓冲区中是 否存在工件数据,若是,执行:暂停所述异步接收线程的工件数据接收,取出所述工件缓冲 区中的工件数据并写入工件抓取队列;若否,触发所述相机拍照;所述机械臂依据所述工件 抓取队列抓取对应的工件。 较佳地,所述处理装置还实时跟踪被选中的工件在每一帧图像中的坐标,并标记 该被选中的工件。 具体地,所述“标记所述工件”具体为:在每一帧图像圈中该被选中的工件。 与现有技术相比,本发明的处理装置是待工件移动至相机视野外才将工件数据发 送给机器人来进行工件抓取,由于工件从相机视野内移动到相机视野外需要耗费的时间较 长,因此发送前后两次选中的工件数据的时间间隔较长,这就使得机器人的控制系统可以 依照工件数据发送的先后顺序依次收到工件数据,进而确保了控制系统能够正常进行工件 5 CN 111570332 A 说 明 书 3/6 页 数据解析以进行工件抓取,能够适应于选中操作比较频繁的情形;同时,也有效减轻了以太 网网卡的负担。而机器人的控制系统接收处理装置发送的工件数据时,是采用异步接收线 程进行接收,主线程再读取异步接收线程的数据,大大减少了主线程的等待时间,进而也减 少了相机的等待时间,提高了作业效率。即是,本发明的工件数据发送方式和接收方式使得 处理装置和机器人可以适应前后两帧图像之间时间间隔非常短的作业需求,从而可以在显 示器以视频流的方式(高速的图片流)显示图像,更好地模拟工件在现场的真实环境,图像 显示也更加顺畅,分选工人可以更好地进行操作。 附图说明 图1是本发明人机协作分选系统的组成结构框图。 图2是本发明人机协作分选系统一实施例的结构示意图。 图3是本发明人机协作分选系统另一实施例的结构示意图。 图4是本发明人机协作分选系统又一实施例的结构示意图。 图5是本发明处理装置发送工件数据的流程图。 图6是现有技术中机器人接收工件数据的流程图。 图7是本发明机器人接收工件数据的流程图。











