
技术摘要:
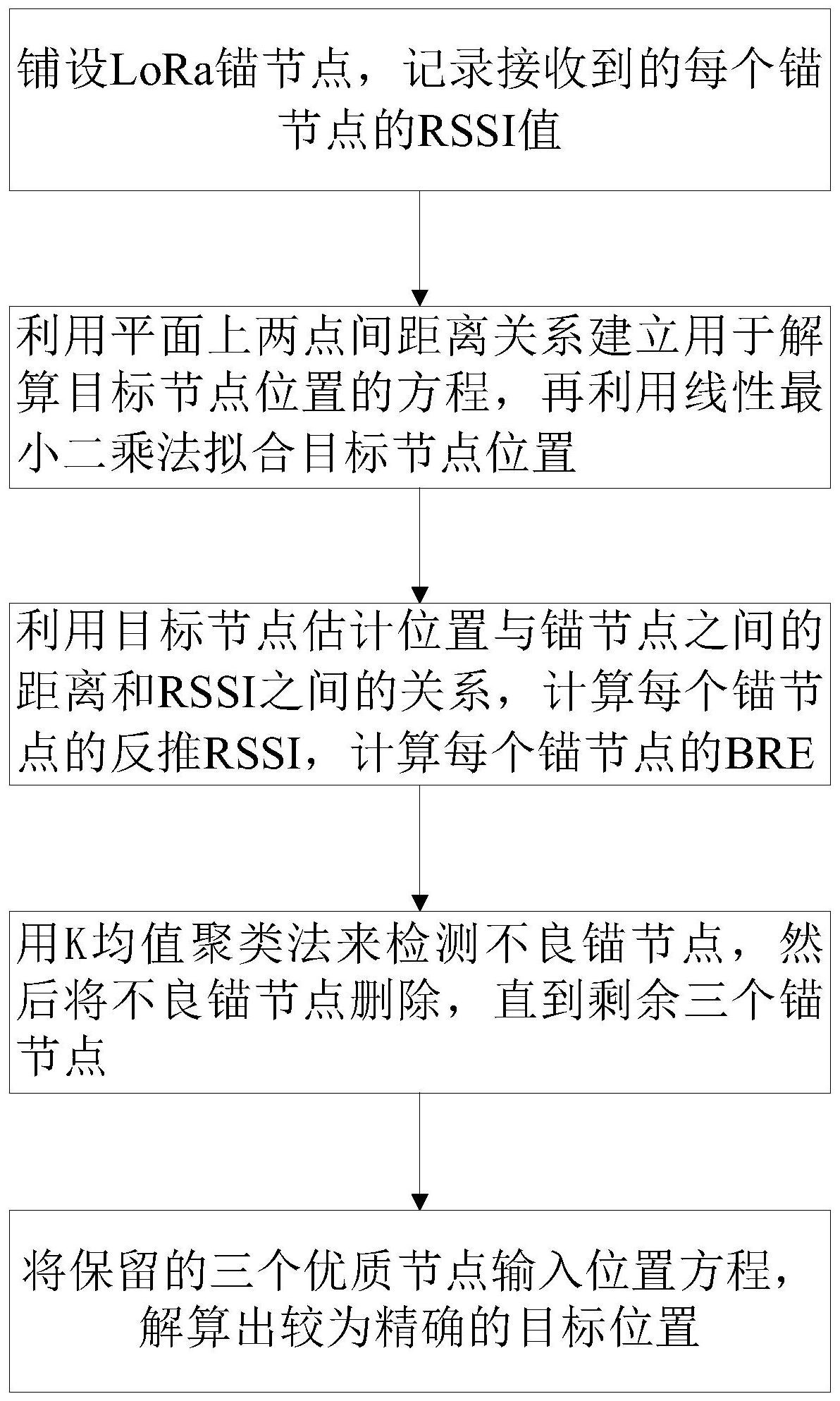
本发明公开一种用于LoRa定位系统的不良锚节点检测与消除方法,步骤如下:1、在地面上铺设锚节点,假设LoRa接收器在当前时刻接收到的锚节点数为N(Γ),记录每个锚节点的RSSI值;2、利用平面上两点间距离关系建立用于解算目标节点位置的方程,再利用线性最小二乘法(LLS) 全部
背景技术:
随着物联网技术的蓬勃发展,基于位置信息的服务(Location Based Services, LBS)已经成为移动终端的必备功能之一。目前,各种不同的无线技术已应用于定位系统,其 中蓝牙、ZigBee、RFID和WiFi是常见的室内定位技术。然而,由于技术的限制,上述几种方法 的有效范围较小,通常只有几米。对于室外环境,蜂窝网络技术和卫星定位系统是常用的定 位技术,后者更加流行,因为蜂窝网络的定位准确性远低于卫星定位系统。此外,基于卫星 的定位系统几乎覆盖了地球的100%,并且经常更新。但是,卫星定位系统不能用于室内环 境,并且功耗很高。 部署大规模物联网要求节点设备价格低廉且功耗较低,这种需求促使研究者们寻 找更适合的定位方式对物联网中的目标设备进行定位。LoRa技术就在这种情况下应运而 生,该技术具有远距离(最长15公里)、低功耗(电池寿命长达5年)和低成本(低成本芯片组) 的优点,现已被广泛用于低功耗广域网的开发和设计以支持物联网应用,因此LoRa技术是 一种具有较大潜力的物联网定位替代解决方案。 虽然LoRa技术具有诸多的优点,但是当LoRa基站接收到的信号强度值RSSI (Received Signal Strength Indication)较小时,无法识别该基站接收信号是否受到非 高斯噪声的影响。如果将被非高斯噪声污染的接收信号用于融合定位,将会导致较大的定 位误差。因此,要使用LoRa技术进行有效的定位,就必须要检测和识别出这些受污染的不良 锚节点,将其从融合算法中剔除,才能提高LoRa定位的精度,为LoRa系统的大规模应用提供 基础。
技术实现要素:
针对现有技术的不足,本发明提供了一种用于LoRa定位系统的不良锚节点检测与 消除方法,并将剩余的“好”锚节点用来融合定位,得到较为精确的位置估计。 为了解决上述问题,本发明采取的技术方案为: 一种用于LoRa定位系统的不良锚节点检测与消除方法,包括如下步骤: 步骤1,在地面上铺设锚节点,假设LoRa接收器在当前时刻接收到的锚节点数为N (Γ),记录每个锚节点的RSSI值; 步骤2,利用平面上两点间平面距离 建立用于解算目标节点位置的方 程,再利用线性最小二乘法(Linear Least Squares,LLS),得到目标节点的估计位置; 步骤3,利用目标节点的估计位置与锚节点之间距离和RSSI之间的关系,反推每个 锚节点的RSSI值,并计算每个锚节点的BRE(Back RSSI Error); 步骤4,用K均值聚类来消除“不良”锚节点,并将删除坏锚节点后剩余的3个实测的 5 CN 111555824 A 说 明 书 2/7 页 RSSI值输入位置方程,得到精确的位置估计。 作为改进的是,步骤1中有一个目标节点,其在平面上的位置用pt表示,其平面坐 标(xt,yt)是未知的,并且在水平地面上铺设一组锚节点 各个锚节 点的位置已知,其中N(Γ)是Γ中锚节点的总数, 是Γ中的第n个锚节点的位置坐标,即 n=1,2,…,N(Γ)。 作为改进的是,步骤2中的具体步骤如下,设目标节点与锚节点之间的平面距离为 即 其中 表示目标节点pt与第n个锚点之间的平面距离,n=1,2,…,N(Γ); 目标节点与锚节点之间平面距离 和RSSI值 之间的关系为 式中, 是测得的路径损耗指数, 是在参考距离处测得的参考RSSI值,且 和 的取值和LoRa芯片的参数有关, 表示第n个锚节点处接收到的目标节点pt的信号 强度RSSI值,n=1,2,…,N(Γ); 将式(1)至式(2)结合起来以得到矢量形式的一组方程,即 Aθ=b (3) 6 CN 111555824 A 说 明 书 3/7 页 通过应用LLS方法,可以得到 A =(ATA-1AT (10) 式中上标“^”表示对应变量的估计值,上标“T”是矩阵的转置运算,上标“-1”表示 矩阵的求逆运算, 表示通过使用具有Γ和 的LLS估计得到的目标节点的位置。 作为改进的是,步骤3中,利用公式(11)计算目标节点的估计位置 与锚节点 之间的反推RSSI值 即 其中 表示上一步估计得到的目标节点位置,其坐标为 将目标节点pt实测接收到的锚节点pn的RSSI值 与目标节点估计位置 与锚节点pn之间的反推RSSI值 做差取绝对值定义为锚节点 的后向接收信号 强度误差(Backward RSSI Error,BRE),即 定义后向接收信号强度误差的平均值为MBRE(Mean Backward RSSI Error,),由 于可以接收到N(Γ)个锚节点,所以可以得到N(Γ)个BRE,将这N(Γ)个BRE做平均就得到此 时的MBRE,即 作为改进的是,步骤4中使用K均值聚类来消除“不良”锚节点,并使用其余“好”锚 节点来计算目标节点的位置,具体步骤如下: 步骤4.1,将接受器接收到的N(Γ)个锚节点实测的RSSI值用R表示 7 CN 111555824 A 说 明 书 4/7 页 步骤4.2,每次从N(Γ)个锚节点中取出3个,共计 种组合,取出的点带 入矢量方程(3)中,得到目标节点的M个估计的位置; 步骤4.3,将M个估计的位置,利用K均值法进行聚类,假设分为K类,然后再计算每 类的质心位置; 步骤4.4,通过检查每个群集中心的MBRE来找到最佳群集,并通过检查“其他群集” 中所有锚节点的出现次数来找到“坏”锚节点,计算每类的MBRE,比较大小,最小的MBRE认为 这一组定位是最准确的,假设最小MBRE的类为Kmin; 步骤4.5,将Kmin组排除,统计其余K-1类中每个锚节点出现的次数,出现最多的锚 点就认为是坏锚节点,将其排除; 步骤4.6,将R清空,再将剩余的锚节点的RRSI放入R中,此时跳转到步骤4.1,直到 删除坏点后剩余锚节点的个数为3; 步骤4.7,将保持下来的3个优质锚节点输入位置方程(3),解算出准确的目标位 置。 有益效果: 本发明提供了一种用于LoRa定位系统的不良锚节点检测与消除方法,在定位过程 中删除不良锚节点以降低LoRa网络中高斯噪声和非高斯噪声的影响。本发明提出的方法可 以大幅度提高基于RSSI的LoRa定位系统的精度,并且在大型室内外环境中均能正常使用, 具有成本低、方便快捷、鲁棒性高的优点。 附图说明 图1为本发明一种用于LoRa定位系统的不良锚节点检测与消除方法的流程图。











