
技术摘要:
本发明公开了一种ROV投饵机器人,包括球形饵料器和水下航行器,所述球形饵料器和水下航行器牵连在一起,所述球形饵料器包括船身外壳和圆形料斗,所述圆形料斗安装在船身外壳内,所述船身外壳的上方固定安装有外盖,所述圆形料斗的上端与外盖固定连接,所述圆形料斗的上 全部
背景技术:
饲料是水产养殖中最主要的可变成本,一般占养殖总成本的50%~80%,投饵量 过高,既浪费饲料,增加成本,又增加了局部水域环境恶化的可能性,投饵量过低,会降低养 殖对象的生长速度,延长养殖周期,导致单位渔获及其它可变成本和养殖风险的增加,养殖 对象对饵料的需求量、生长速度及其饲料转化率都是随着环境条件(包括水温、水质、溶解 氧浓度、流速、光照强度和白昼的长度等)的改变而改变的,也与饲料的品质和养殖对象的 生理因素,这些因素使养殖对象的必需饲料量具有不确定性,几乎不可能通过计算而获得 精确数值。 在工业自动化技术还没有普及到传统养殖户的过去,饲料投喂方式基本是以养殖 户的自身经验,按照四定规则即定时、定质、定点、定量,同时根据养殖鱼种、数量、养殖环境 来人工投喂,全程手工操作,随着工业发展,逐渐产生了自动投饵机,自动投饵机根据预编 好的程序或者设置好的机械状态隔一定的时间间隔定点投喂固定的饲料量,逐渐发展到投 饵时间和投饵量均可调,但是诸如投饵速度和饵料抛洒面积是不可调的,这种自动投饵仅 仅只是代替了手工抛洒动作,并不是真正意义上的自动投饵。 为此,我们提出一种ROV投饵机器人解决上述问题。
技术实现要素:
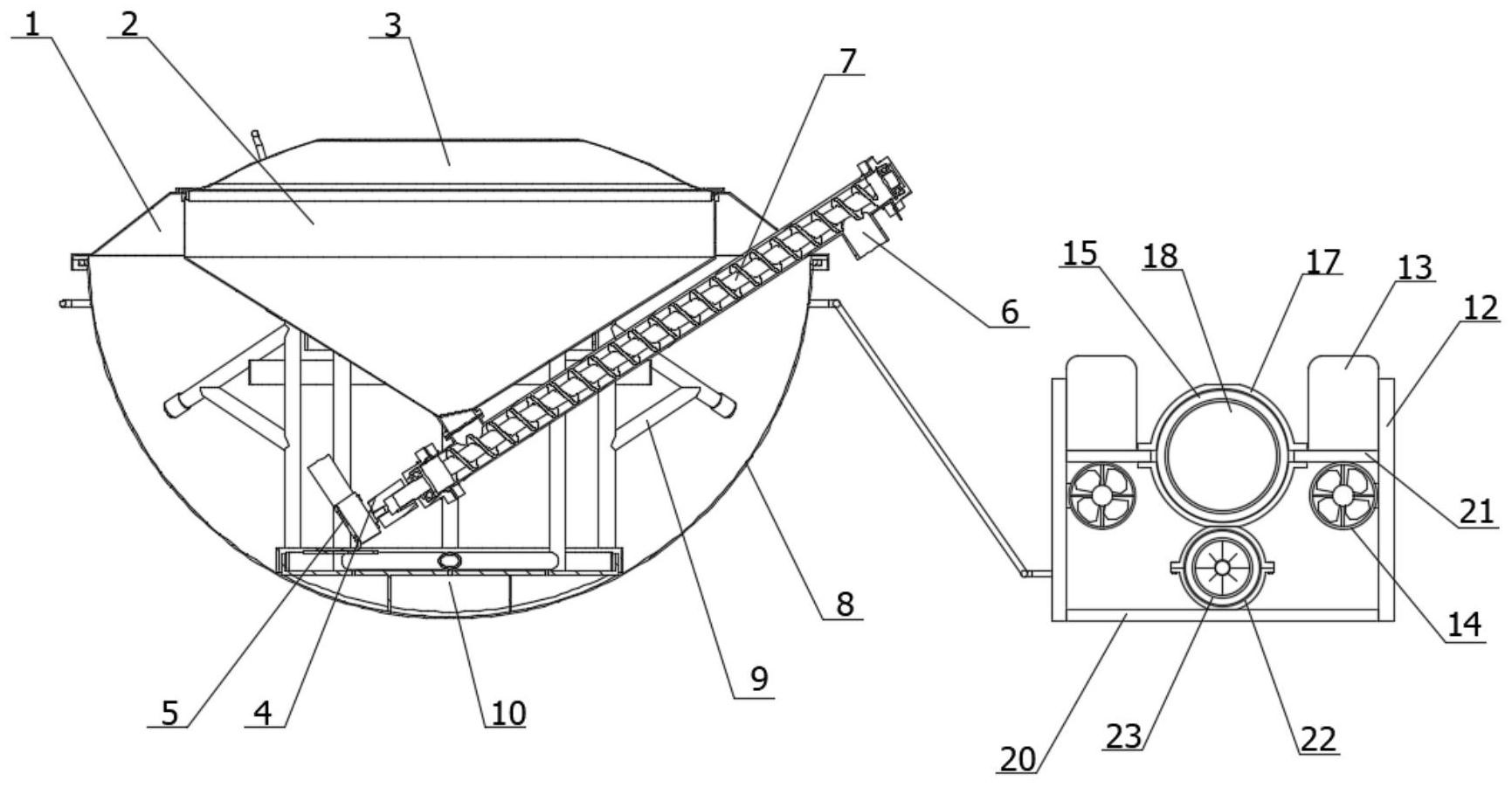
本发明的目的是为了解决现有技术中存在的问题,而提出的一种ROV投饵机器人。 为了实现上述目的,本发明采用了如下技术方案: 一种ROV投饵机器人,包括球形饵料器和水下航行器,所述球形饵料器和水下航行 器牵连在一起,所述球形饵料器包括船身外壳和圆形料斗,所述圆形料斗安装在船身外壳 内,所述船身外壳的上方固定安装有外盖,所述圆形料斗的上端与外盖固定连接,所述圆形 料斗的上方固定安装有盖子,所述船身外壳内的底部安装有支撑架,所述支撑架上固定安 装有骨架,所述圆形料斗卡接在骨架上,所述船身外壳内插设有送料管,所述送料管内转动 安装有螺杆,所述支撑架的一侧固定安装有电机支架,所述电机支架上固定安装有电机,所 述送料管的下端固定连接有联轴器,所述螺杆的下端穿过联轴器与电机的驱动端固定连 接,所述圆形料斗的下端与送料管的一侧连接; 所述水下航行器包括装配体和主仓体,所述装配体上安装有六个推进器,所述装 配体包括底部支架和一对侧框架,两个所述侧框架通过底部支架固定连接,两个所述侧框 架相面对的一侧均对称固定连接有一对安装板,每个所述安装板上均固定安装有浮阀,所 述主仓体设置在两个侧框架之间,所述安装板之间设置有一对第一固定机构,所述底部支 架上安装有第二固定机构,所述第二固定机构内固定安装有水下探照灯,所述主仓体固定 安装在两个第一固定机构内,所述主仓体的一端安装有亚克力半球罩,所述亚克力半球罩 4 CN 111587831 A 说 明 书 2/6 页 内安装有摄像头,所述主仓体内安装有蓄电池和ARM主控板。 优选地,所述ARM主控板上设置有温度传感器、深度压力传感器、九轴陀螺仪芯片、 电源管理芯片、水质传感器、声波传感系统、电力猫模块和两个继电器,所述主仓体内设置 有微型计算机,所述微型计算机与ARM主控板电连接,所述微型计算机通过以太网与电力猫 模块电连接,每个所述推进器上均密封安装有无刷电机驱动板,所述无刷电机驱动板与推 进器电连接,所述电源管理芯片与蓄电池电连接,两个所述继电器分别与球形饵料器、水下 探照灯电连接,所述摄像头通过DCMI电连接有水上通讯模块,所述水上通讯模块通过以太 网与ARM主控板电连接,所述水上通讯模块通过无线通讯模块电连接有陆地通讯模块,所述 陆地通讯模块通过无线通讯模块电连接有用户端,所述无线通讯模块与电力猫模块电连 接。 优选地,所述RM主控板采用以Cortex-M4内核的嵌入式ARM芯片STM32F429IGT6作 为MPU的阿波罗开发板并配OV5640摄像模组,所述九轴陀螺仪芯片采用MPU9250实现姿态感 知功能,所述摄像头采用OV5640模组。 优选地,所述第一固定机构包括两个仓体卡环,两个所述仓体卡环分别固定连接 在两个安装板上,所述主仓体固定卡接在仓体卡环之间。 优选地,所述第二固定机构包括两个链接板,两个所述链接板的两端分别固定连 接,其中一个所述链接板与底部支架固定连接,所述水下探照灯固定卡接在两个链接板之 间。 优选地,其中两个所述推进器安装在相邻的两个浮阀之间,剩下的四个所述推进 器分别安装在各个安装板的底部,六个所述推进器均与侧框架固定连接。 优选的,所述骨架上安装有多个橡胶垫,所述橡胶垫与船身外壳的内壁相抵,所述 骨架上设置有五个支撑片,所述圆形料斗通过支撑片与骨架固定连接。 与现有技术相比,本发明的有益效果是: 1、水质监测:PH值、含氧量、氨氮比、亚硝酸盐等水质参数对水产生物的重要性不 言而喻,水清水浊已不能仅仅代表水质的优良,时时地了解水质对养殖户来说几乎是必须 的; 2、水产生物群观察监测:有效寻找、跟踪到水产生物集群区域,实现对生物的有效 观察,如有疾病风险可及时施加手段予以控制; 3、养殖幼苗投放:幼苗投放有一定的风险行,成活率是关键,利用投饵机器人的机 动性能,使幼苗生物能够逐步适应环境水温,分批投放,投放部分后可持续水下跟踪观察, 无危险后继续投放,将大大提高幼苗成活率; 4、渔场或岛礁的检查:可定期巡航养殖渔场或岛礁的环境,对于危害生物进行报 警、驱逐,以免外来种群的蔓延使水产生物团灭; 5、精准投饵投药:对于鱼病防治,使用投饵机器人可以将鱼饵替换成鱼药,同样可 进行精准化鱼药投放; 6、远程操控:使养殖户可随时在家、在办公场所或任何养殖区域对投饵机器人进 行操控,做到全天候无缝衔接。 5 CN 111587831 A 说 明 书 3/6 页 附图说明 图1为本发明提出的一种ROV投饵机器人的结构示意图; 图2为本发明提出的一种ROV投饵机器人中骨架的结构示意图; 图3为本发明提出的一种ROV投饵机器人中水下航行器的俯视的结构示意图; 图4为本发明提出的一种ROV投饵机器人中水下航行器的装配体的结构示意图; 图5为本发明提出的一种ROV投饵机器人的系统框图; 图6为本发明提出的一种ROV投饵机器人中水下航行器硬件设计结构框图; 图7为本发明提出的一种ROV投饵机器人中ARM芯片连接图; 图8为本发明提出的一种ROV投饵机器人中推进器14PWM波输出及摄像头19接口原 理图; 图9为本发明提出的一种ROV投饵机器人中九轴陀螺芯片原理图; 图10为本发明提出的一种ROV投饵机器人中以太网接口原理图; 图11为本发明提出的一种ROV投饵机器人中I2C接口扩展电路; 图12为本发明提出的一种ROV投饵机器人中DRAM芯片电路图; 图13为本发明提出的一种ROV投饵机器人中电源电路; 图14为本发明提出的一种ROV投饵机器人中USB转串口电路。 图中:1、外盖;2、圆形料斗;3、盖子;4、联轴器;5、电机支架;6、送料管;7、螺杆;8、 船身外壳;9、骨架;10、支撑架;11、支撑片;12、侧框架;13、浮阀;14、推进器;15、主仓体;16、 ARM主控板;17、仓体卡环;18、亚克力半球罩;19、摄像头;20、底部支架;21、安装板;22、链接 板;23、水下探照灯。











