
技术摘要:
本发明公开了一种储刀配刀系统,包括刀储物流系统、仓储库位和多个用于配刀到刀盘盒中的取刀配刀机;所述仓储库位设置于所述刀储物流系统的一侧,多个所述取刀配刀机沿所述刀储物流系统设置。本发明的储刀配刀系统通过设置刀储物流系统、仓储库位和取刀配刀机,刀储物 全部
背景技术:
现有技术的钻刀的取放、归类、运输转移及存储位都是分开的,空间利用率低,且 转运需要使用大量的人工,成本高,且人工容易造成误操作,生产效率低。 刀盘取放料通常采用人工或者使用叉车等半自动方式将刀盘放置到刀架上,以上 两种操作方式的自动化程度低,直接影响取放料速度,导致效率低。另外,刀架无法竖向设 置太高,否则难以将刀盘放入或取出,这就导致刀架的占地面积较大。 钻刀在加工完成后,通常需要装配到刀盘盒中,在装配过程中需要抓取、筛选需要 的钻刀和刀盘盒。现有技术的钻刀装配工作通常采用人工进行操作,或者采用半自动化的 方式,这些方式导致生产精准性降低,容易出现装配错乱或者数量不完整的的刀盘盒,且需 要投入大量的人工,严重影响正常效率,增加生产成本。
技术实现要素:
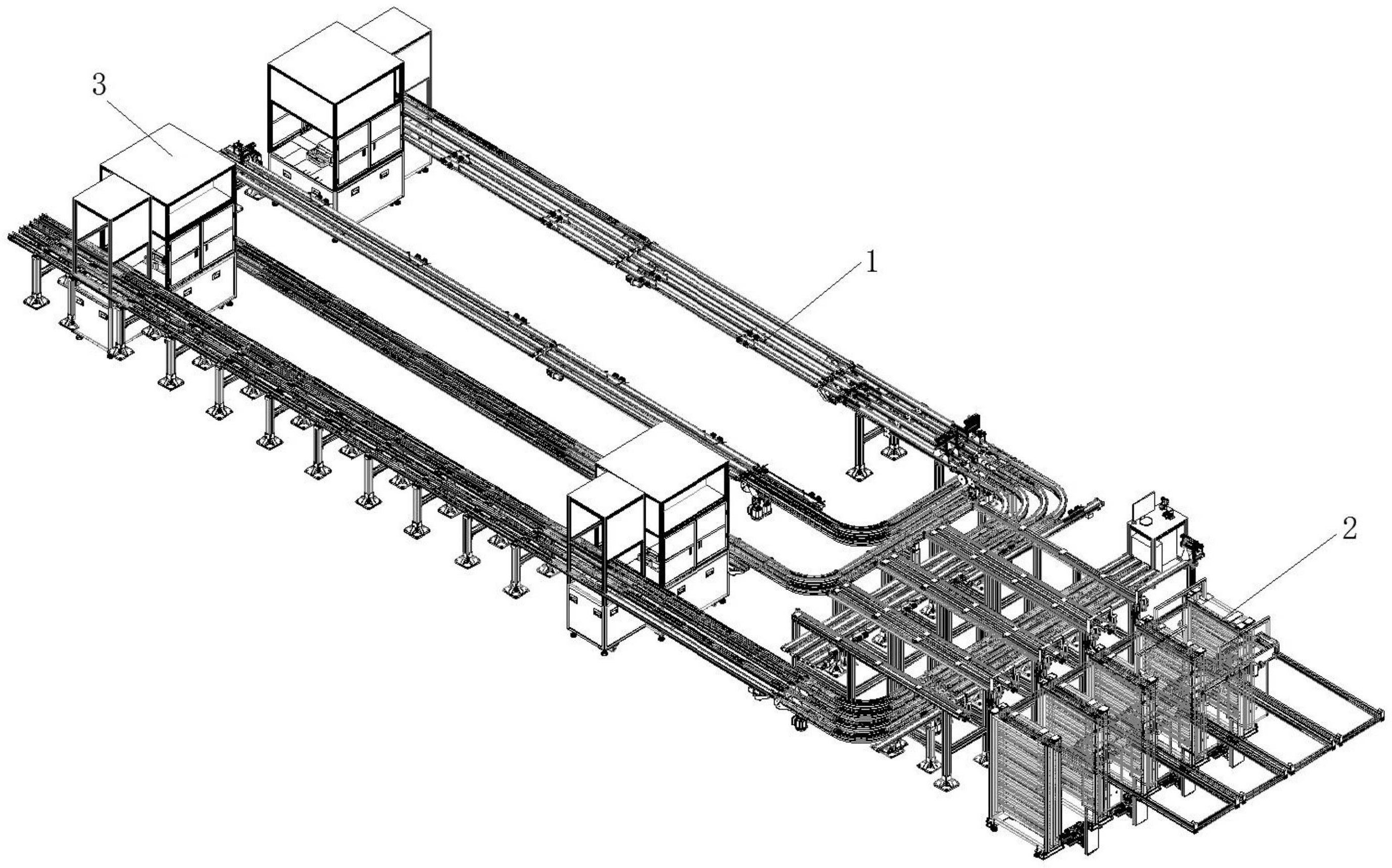
基于此,本发明的目的在于,提供一种一体化、自动化、效率高储刀配刀系统。 本发明的储刀配刀系统,包括刀储物流系统、仓储库位和多个用于配刀到刀盘盒 中的取刀配刀机; 所述仓储库位设置于所述刀储物流系统的一侧,多个所述取刀配刀机沿所述刀储 物流系统设置。 本发明的储刀配刀系统通过设置刀储物流系统、仓储库位和取刀配刀机,刀储物 流系统可从仓储库位取出整盒/非整盒刀盘盒,并送到取刀配刀机进行配刀,配刀完成之 后,再从取刀配刀机取出配置完好钻刀之后的刀整盒/非整盒刀盘盒,非整盒刀盒可再次返 回仓储库位,整盒/非整盒刀盒可直接出库,实现了钻刀的自动存储、自动配刀,代替了人工 操作,减少了人工的使用成本,提高了生产效率。 上述技术方案在一种实施方式中,所述刀储物流系统包括:用于将空的刀盘盒上 料的空盒入料线、用于输出仓储库位中的整盒或非整盒的刀盘盒的出库线、用于将配刀后 的刀盘盒直接输出或将仓储库位的刀盘盒直接输出的直接出库线和用于将非整盒的刀盘 盒输送回仓储库位的回库线; 沿所述空盒入料线设置有多个所述取刀配刀机; 所述出库线与所述直接出库线、所述回库线平行相邻设置,且所述出库线、所述直 接出库线和所述回库线亦沿多个取刀配刀机设置,且所述出库线、所述直接出库线和所述 回库线的一侧设置有所述仓储库位。 上述技术方案在一种实施方式中,所述刀储物料系统还包括用于将所述空盒入料 线上的空盒返回的空盒返回线,所述空盒返回线与所述空盒入料线平行相邻设置; 所述刀储物料系统还包括用于将整盒或非整盒的刀盘盒上料并被转入仓储库位 4 CN 111591658 A 说 明 书 2/10 页 的整盒/非整盒入料线,所述整盒/非整盒入料线设置于所述回库线末端的一侧。 上述技术方案在一种实施方式中,所述仓储库位包括立库和RGV机械手; 所述立库的顶部水平设置有导轨; 所述RGV机械手包括滑动架、升降模组和取料机械手,所述滑动架可滑动架设于所 述立库的导轨上,所述升降模组竖向设置于所述滑动架上,所述取料机械手与所述升降模 组连接并可被所述升降模组带动升降。 上述技术方案在一种实施方式中,所述滑动架的顶部设置有滚轮,所述滑动架通 过所述滚轮可滑动架设于所述立库的导轨上; 所述立库的顶部还水平设置有与所述导轨平行的水平齿条,所述滑动架的顶部设 置有水平驱动电机,所述水平驱动电机的输出端连接有水平驱动齿轮,所述水平驱动齿轮 与所述水平齿条啮合。 上述技术方案在一种实施方式中,所述RGV机械手还包括托架,所述托架可上下滑 动设置于所述滑动架上,所述托架与升降模组连接,所述取料机械手固定于所述托架上。 上述技术方案在一种实施方式中,所述取料机械手包括取料驱动电机和取料托 板; 所述取料驱动电机固定于所述托架上,所述取料驱动电机的输出端与所述取料托 板连接,所述取料驱动电机可驱动所述取料托板向所述立库方向移动。 上述技术方案在一种实施方式中,所述取刀配刀机包括取刀机、配刀机以及设置 于所述取刀机和所述配刀机一侧的多个机械手; 所述取刀机包括取刀旋转平台、取刀转盘和多个取刀夹具;所述取刀旋转平台设 置于所述取刀转盘下方,且所述取刀旋转平台带动所述取刀转盘转动,多个所述取刀夹具 沿所述取刀转盘的周缘设置; 所述配刀机包括配刀旋转平台、配刀转盘和多个配刀夹具;所述配刀旋转平台设 置于所述配刀转盘下方,且所述配刀旋转平台带动所述配刀转盘转动,多个所述配刀夹具 沿所述配刀转盘的周缘设置。 上述技术方案在一种实施方式中,多个所述取刀夹具和多个所述配刀夹具均包括 底板、挡板和压板;所述底板固定于所述取刀转盘上,所述挡板沿所述底板的侧边固定,所 述压板可移动设置于所述底板上并位于所述挡板相对的一侧。 上述技术方案在一种实施方式中,多个所述机械手均包括支架、导轨、滑动架、水 平驱动器、竖向驱动器和夹爪气缸; 所述支架设置于所述取刀机或所述配刀机的一侧,所述导轨水平固定于所述支架 的上部,所述滑动架可滑动设置于所述导轨上,所述水平驱动器固定于所述支架上且其动 力输出端与所述滑动架传动连接,所述竖向驱动器固定于所述滑动架上且其动力输出端可 带动所述夹爪气缸升降,所述夹爪气缸设置于所述取刀转盘或所述配刀转盘上方。 相对于现有技术,本发明的储刀配刀系统通过设置刀储物流系统、仓储库位和取 刀配刀机,刀储物流系统可从仓储库位取出整盒/非整盒刀盘盒,并送到取刀配刀机进行配 刀,配刀完成之后,再从取刀配刀机取出配置完好钻刀之后的刀整盒/非整盒刀盘盒,非整 盒刀盒可再次返回仓储库位,整盒/非整盒刀盒可直接出库,实现了钻刀的自动存储、自动 配刀,代替了人工操作,减少了人工的使用成本,提高了生产效率。本发明的储刀配刀系统 5 CN 111591658 A 说 明 书 3/10 页 具有一体化、自动化、效率高等特点。 为了更好地理解和实施,下面结合附图详细说明本发明。 附图说明 图1是本发明的储刀配刀系统优选结构的立体结构示意图。 图2是刀储物流系统优选结构的结构示意图。 图3是图2中I处的局部放大图。 图4是图2中II处的局部放大图。 图5是仓储库位优选结构的立体结构示意图。 图6是RGV机械手优选结构的局部放大图。 图7是取料机械手优选结构的结构示意图。 图8是取刀配刀机优选结构的立体结构示意图。 图9是取刀配刀机优选结构另一角度的立体结构示意图。 图10是取刀机优选结构的立体结构示意图。 图11是取刀机优选结构另一角度的立体结构示意图。 图12是取刀机优选结构的侧视图。 图13是取刀夹具和配刀夹具优选结构的立体结构示意图。 图14是多个机械手设置于取刀机及配刀机周围的示意图。











