
技术摘要:
本发明公开了一种机器人三维环境的构建方法及系统,属于机器人技术领域,方法包括:步骤S1,采集外部工作环境中目标区域的立体深度图像;步骤S2,采集外部工作环境的雷达扫描图像;步骤S3,对立体深度图像、雷达扫描图像以及采集单元于全局坐标系中的坐标信息进行合并 全部
背景技术:
机器人最早被应用于工业制造技术领域,工业机器人是面向工业领域的多关节机 械手或多自由度的机器装置,它可以自动执行工作并依靠自身动力和控制能力来实现各种 功能,工业机器人可以由操作人员通过相应的控制端进行直接的控制,也可以按照预先编 排的程序自动运行,机器人在执行任务之前先需要通过自身携带的传感器来构建三维环 境,并将三维环境与控制端进行交互,由于其具体工作环境在不断的变化,且由于信号传输 带宽以及机器人自身携带的处理器处理能力的限制,在三维环境的构建过程中,机器人通 常会选择低像素的构建框架,以节约带宽和处理器资源,但在机器人需要通过精细动作来 完成精细任务时,低像素的构建框架不能满足需求,因此,需要一种能够根据操作人员的要 求动态变化的三维环境构建方法。
技术实现要素:
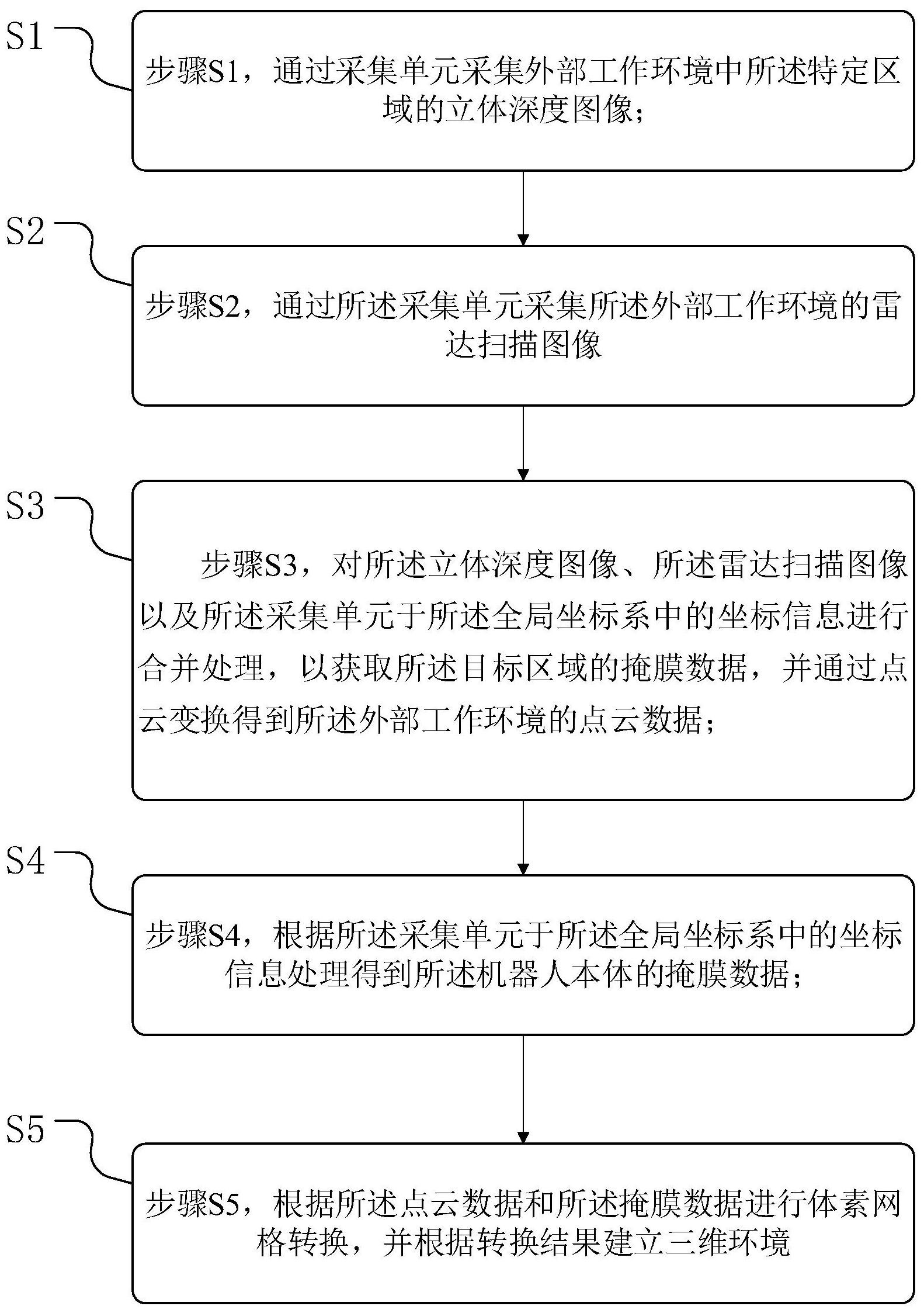
根据现有技术中存在的上述问题,现提供一种机器人三维环境的构建方法及系 统,用户通过选择目标区域进行三维环境的构建,可以有效满足不同应用情况下对三维环 境的不同像素要求。 上述技术方案具体包括: 一种机器人三维环境的构建方法,其中,所述机器人预先构建一全局坐标系,所述 机器人实时采集外部工作环境的视频数据和图像数据,并将所述视频数据和所述图像数据 传输至与所述机器人远程连接的一控制终端中,用户通过所述控制终端选择所述工作环境 中的目标区域; 所述构建方法具体包括: 步骤S1,通过采集单元采集外部工作环境中所述目标区域的立体深度图像; 步骤S2,通过所述采集单元采集所述外部工作环境的雷达扫描图像; 步骤S3,对所述立体深度图像、所述雷达扫描图像以及所述采集单元于所述全局 坐标系中的坐标信息进行合并处理,以获取所述目标区域的掩膜数据,并通过点云变换得 到所述外部工作环境的点云数据; 步骤S4,根据所述采集单元于所述全局坐标系中的坐标信息处理得到所述机器人 本体的掩膜数据; 步骤S5,根据所述点云数据和所述掩膜数据进行体素网格转换,并根据转换结果 建立三维环境。 优选地,其中,于执行所述步骤S5前,还包括: 步骤S50,通过第三采集单元采集所述外部工作环境中的颜色信息,并根据所述颜 色信息为所述点云数据中对应的点添加用于表示颜色的数据信息。 4 CN 111590573 A 说 明 书 2/5 页 优选地,其中,所述步骤S5中,预先构建一三维体素框架,所述点云数据于所述三 维体素框架中进行体素网格转换。 优选地,其中,所述三维体素框架中的数据存储结构为八叉树结构。 优选地,其中,所述三维体素框架分为高分辨率框架、粗分辨率框架和用户自定义 分别率框架三种类型。 一种机器人三维环境的构建系统,其中,所述机器人预先构建一全局坐标系,所述 机器人实时采集外部工作环境的视频数据和图像数据,并将所述视频数据和所述图像数据 传输至与所述机器人远程连接的一控制终端中,用户通过所述控制终端选择所述工作环境 中的目标区域; 所述构建系统具体包括: 图像采集单元,用于采集外部工作环境中所述目标区域的立体深度图像并采集所 述外部工作环境的雷达扫描图像; 变换单元,连接所述图像采集单元,用于对所述立体深度图像、所述雷达扫描图像 以及所述采集单元于所述全局坐标系中的坐标信息进行合并处理,以获取所述目标区域的 掩膜数据,并通过点云变换得到所述外部工作环境的点云数据; 三维转换单元,连接所述变换单元,用于根据所述点云数据和所述掩膜数据进行 体素网格转换,生成一转换结果; 掩膜获取单元,用于根据所述采集单元于所述全局坐标系中的坐标信息处理得到 所述机器人本体的掩膜数据; 构建单元,连接所述三维转换单元,用于根据所述转换结果构建所述三维环境。 优选地,其中,还包括: 所述图像采集单元还用于采集所述外部工作环境中的颜色信息; 处理单元,连接所述图像采集单元和所述变换单元,用于根据所述颜色信息为所 述点云数据中对应的点添加用于表示的颜色的数据信息。 优选地,其中,所述三维转换单元中预先构建一三维体素框架,所述点云数据于所 述三维体素框架中进行体素网格转换。 优选地,其中,所述三维体素框架中的数据存储结构为八叉树结构。 优选地,其中,所述三维体素框架分为高分辨率框架、粗分辨率框架和用于自定义 分别率框架三种类型。 上述技术方案的有益效果在于: 提供一种机器人三维环境的构建方法及系统,用户通过选择目标区域进行三维环 境的构建,可以有效满足不同应用情况下对三维环境的不同像素要求。 附图说明 图1是本发明的较佳实施例中,一种机器人三维环境的构建方法的流程示意图; 图2是本发明的较佳实施例中,一种机器人三维环境的构建系统的结构示意图。











