
技术摘要:
本发明公开了一种施工用机器人脚手架重心控制装置,属于建筑施工领域,脚手架设有四个和地面接触的滚轮,所述的重心控制装置包括:分别检测四个滚轮所受压力的传感器;控制器,其接收四个传感器的压力信号;稳定单元(400),其稳定单元设有一个重物件(433),稳定单元 全部
背景技术:
脚手架指施工现场为工人操作并解决垂直和水平运输而搭设的各种支架。建筑界 的通用术语,指建筑工地上用在外墙、内部装修或层高较高无法直接施工的地方。主要为了 施工人员上下干活或外围安全网围护及高空安装构件等,说白了就是搭架子,脚手架制作 材料通常有:竹、木、钢管或合成材料等。有些工程也用脚手架当模板使用,此外在广告业、 市政、交通路桥、矿山等部门也广泛被使用。 脚手架有固定型的和移动型的,移动的脚手架能够根据需要移动位置,现在的移 动脚手架只能操作人员占在工作台上,在需要操作一些底部施工的时候,操作不方便。
技术实现要素:
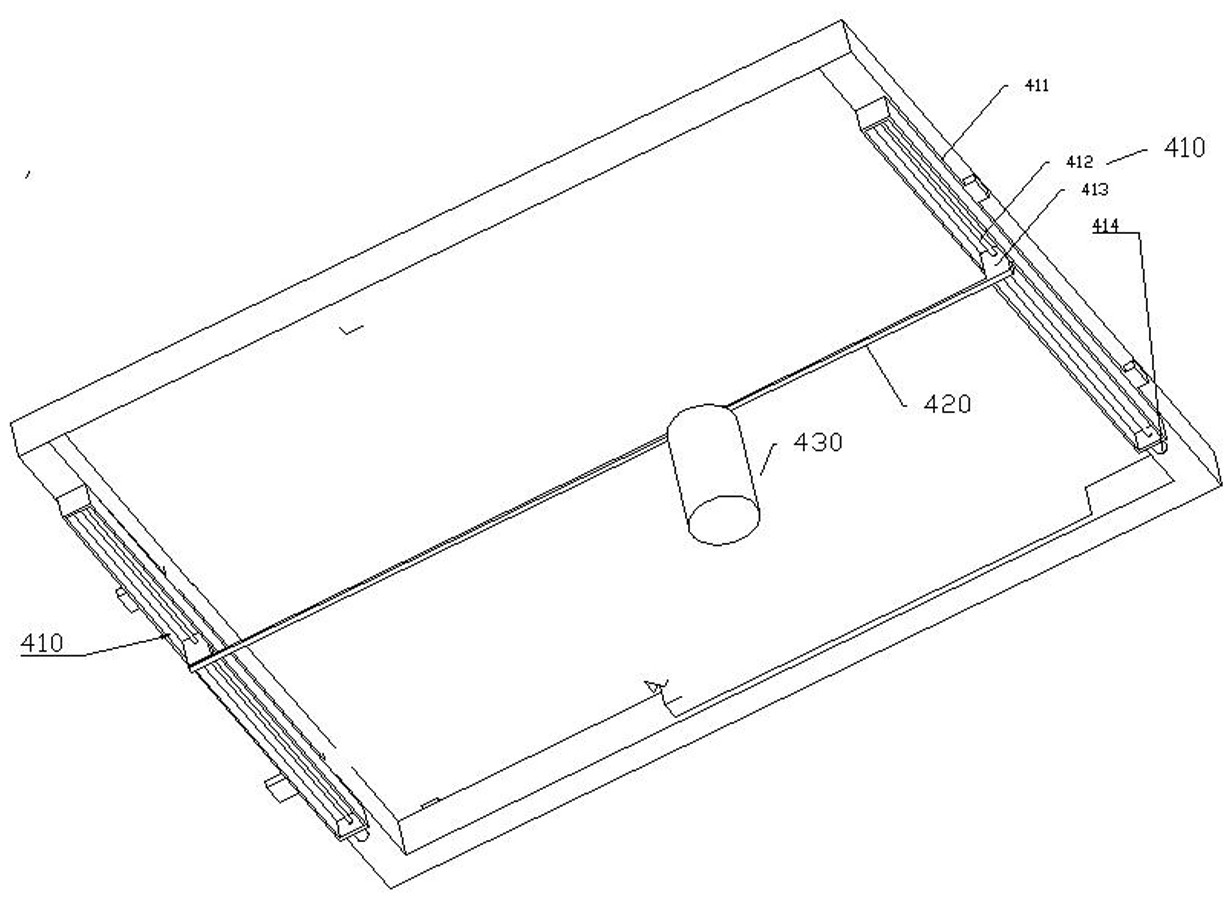
本发明的目的在于:一种施工用机器人脚手架重心控制装置,脚手架设有四个和 地面接触的滚轮,所述的重心控制装置包括: 分别检测四个滚轮所受压力的传感器; 控制器,其接收四个传感器的压力信号; 稳定单元,其稳定单元设有一个重物件,稳定单元能够被控制器控制,以根据四个传感 器的压力信号改变重物件的位置以抑制四个滚轮所受压力的不均衡。 作为改进,所述的稳定单元包括两个对应设置的驱动组件以及连接两个驱动组件 的连接杆,连接杆的轴向为第一方向,连接杆上设有活动物,活动物能够被控制器控制在连 接杆上沿着第一方向移动,驱动组件能够被控制器控制使得连接杆沿着第二方向移动,第 二方向和第一方向垂直。 作为改进,所述的驱动组件包括壳体、位于壳体内的第三螺杆、和第三螺杆螺纹连 接的第四滑动件、驱动第三螺杆转动的第三电机,连接杆的两端分别固定在两个驱动组件 的两个第四滑动件上。 作为改进,所述的活动物包括能够沿着连接杆移动的活动件、重物件以及连接活 动件和重物件的连接件。 作为改进,所述的活动件包括活动壳、位于活动壳内部的齿轮、以及固定在活动壳 上的第四电机,第四电机驱动齿轮转动,连接杆上设有齿部,齿轮和齿部配合以使得齿轮被 驱动转动的时候活动件在连接杆上能够移动。 作为改进,所述的重物件为金属圆柱体。 作为改进,所述的连接件为绳子、金属杆的一种。 本发明还公开了一种施工用机器人脚手架重心控制方法,根据底盘四个滚轮所述 3 CN 111593872 A 说 明 书 2/4 页 的压力,控制权利要求1-7任一项所述的稳定单元改变重物件的水平位置。 附图说明 图1是本发明的结构示意图; 图2框架的示意图; 图3是第二腔体的示意图; 图4是第一工作板和第二工作板的示意图; 图5是升降架的示意图; 图6是升降架的示意图; 图7是稳定单元示意图; 图8是驱动组件示意图; 图9是驱动组件示意图; 图10是活动物的示意图; 图11是活动件示意图; 图12是重物件示意图; 图中标记:100-工作台,110-框架,111-第一腔体,112-第二腔体,113-第三腔体,114- 第一螺杆,115-第一电机,120-第一工作板,121-第一工作板体,122-第一滑动件,123-第二 滑动件,130-第二工作板,131-第二工作板体,132-杆件,133-第三滑动件,200-升降架, 210-第一升降杆,220-第二升降杆,230-第三升降杆,240-第四升降杆,250-活动块,260-固 定块,270-第二螺杆,280-第二电机, 300-底盘,400-稳定单元,410-驱动组件,411-壳体, 412-第三螺杆,413-第四滑动件,414-第三电机,420-连接杆,430-活动物,431-活动件, 4311-齿轮,4312-活动壳,4313-第四电机,432-连接件,433-重物件。











