
技术摘要:
本发明涉及一种抗遮挡的视觉目标跟踪方法,属于模式识别、计算机视觉领域。该方法根据输入的一段视频和待跟踪目标初始帧的位置参数,在余下的图像帧中找出该目标的所在区域。依据APSR策略结合峰值旁瓣比来判断跟踪质量,以决定是否更新相关滤波器,解决视频中跟踪目标 全部
背景技术:
视频运动目标跟踪作为当前计算机领域较为热门的技术之一,对视频中目标行为 能够进行准确地追踪定位,而且随着算法的不断更新,目标跟踪理论也越来越完善,应用的 领域涉及智能视频监控、无人机侦察、智能驾驶等。简单来说,目标跟踪就是在第一帧时给 出目标的初始位置,利用跟踪算法计算出后续每帧图像中目标的位置信息。理论上来说,目 标跟踪能够进行实时的跟踪,但是在实际应用中,由于光照、遮挡、尺度变化等因素,很容易 导致目标丢失。 通常,从构建目标模型的角度可将目标跟踪算法分为生成式方法和判别式方法。 生成式方法对目标进行特征提取以及模型构建,在下一帧中找到与模型相似的区域即为目 标的预测区域。判别式方法将跟踪问题归结于二分类问题,主要研究如何将目标和背景区 分出来。 比较两种方法,判别式方法更能适应背景变化等复杂问题。判别式方法近年来不 断被改进,在技术方面有了极大的突破,研究人员不断地从特征、尺度等方面改进算法,使 得目标跟踪更加适应复杂多变的环境。 由于目标跟踪过程中目标与环境信息的变化导致目标特征的不断变化,以及目标 跟踪对跟踪速度与精度的要求,导致目标跟踪存在如下几个主要难点: 1)目标外观变化。由于物体活动、非刚体形变(如人跳跃、行走等)导致的目标外形 发生变化,或拍摄角度变化导致的目标外观变化等。 2)尺度变化。由于拍摄距离等因素导致目标在影像中所占区域大小发生变化。 3)环境变化。由于拍摄环境(如光照、天气等)变化导致的目标影像成像特点等的 变化。 4)目标快速运动。由于目标的快速移动导致在影像中的坐标位置发生突变,影响 目标搜索的速度和精度。 5)目标遮挡、出视野。由于拍摄中目标被其他物体遮挡导致的特征部分或全部损 失以及由于拍摄时目标跳出视野重新跟踪导致的跟踪失败问题。 6)成像影响。由于红外摄像仪分辨率较低,目标分辨率低,边缘与目标特征不明 显,有时目标与环境差异较小以及任务设备等对焦问题等都会导致目标跟踪时特征的提取 困难。 上述因素对目标跟踪中的目标特征提取以及目标搜索策略具有重大影响,在实际 跟踪过程中,较为准确地及时处理这些因素所造成的影响才能保证目标跟踪的精确性与鲁 棒性。 4 CN 111583306 A 说 明 书 2/5 页
技术实现要素:
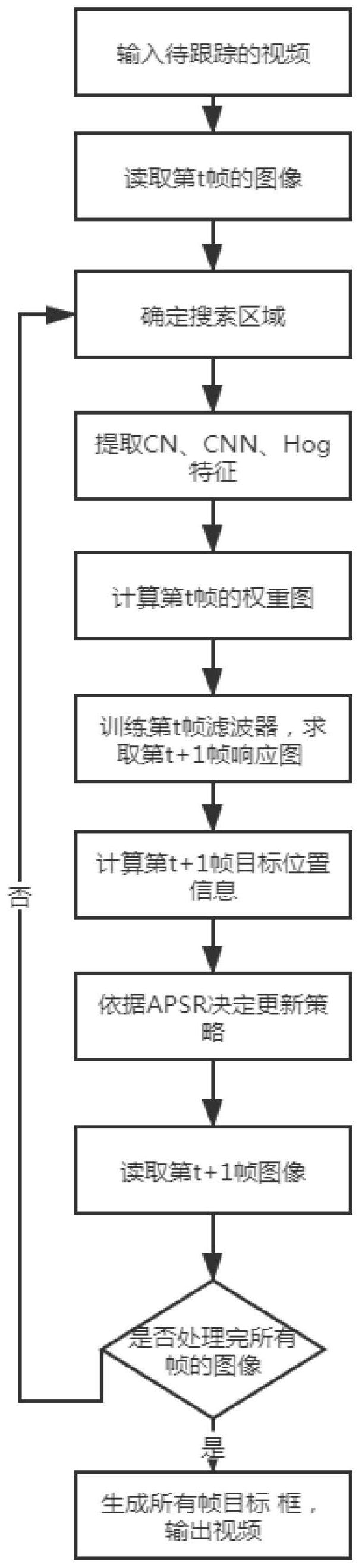
有鉴于此,本发明的目的在于提供一种抗遮挡的视觉目标跟踪方法,解决现有技 术在进行目标跟踪时的精度过差的问题。该方法利用APSR策略,判断跟踪质量,解决目标遮 挡或变形情况下的滤波器的无效更新,从而提高实际跟踪时的跟踪精度。 为达到上述目的,本发明提供如下技术方案: 一种抗遮挡的视觉目标跟踪方法,具体包括以下步骤: S1:读取待跟踪的视频序列,根据给定的初始帧的待跟踪目标,确定待跟踪目标的 位置信息,提取CN、CNN和Hog特征,计算第t帧的权重图Gt; S2:利用提取的目标CN、CNN和Hog特征,训练相关滤波器f; S3:输入第t 1帧图像,在t 1帧内寻找目标位置,并提取CN、CNN和Hog特征,求解第 t帧时的滤波器ft,计算t 1帧的目标响应图Kt 1; S4:第t 1帧的目标响应图Kt 1,采用APSR策略,结合峰值旁瓣比来判断跟踪质量, 决定是否更新相关滤波器; S5:结合所有帧的目标位置信息形成目标位置框,生成标定目标区域的视频,进行 输出,方便后续的分析研究。 进一步,所述步骤S1中,第t帧的权重图Gt,由空间感知权重图Q和目标相似权重图 R叠加构成,即Gt=Q R; 计算空间感知权重图Q,具体包括:任意一个像素pi,其空间感知权重的数值记作Q (pi),计算目标框整体所有像素点的Q(pi),生成最终的Q; 计算目标相似权重图R,具体包括:已知第t帧图像为初始帧,给定目标位置和大 小,构建需要的颜色直方图 和 表达式为: 其中, 表示第t帧的目标, 表示第t帧的背景颜色直方图,γ为固定的更新率, 和 分别为第1帧到第t-1帧的目标和背景颜色直方图,依据下式得到基于颜色直 方图的目标相似权重图R: 其中, 和 分别表示第t帧的目标区域和背景区域的像素值大小占整个给定 搜索区域总像素值的比例。 进一步,所述步骤S2中,利用第t帧的目标区域的CN、CNN和Hog特征,训练出相关滤 波器ft,实际的优化函数为: 其中,xk、yk为满足高斯分布的标签,ω为滤波器的约束;ft=ft ⊙ Gt,其中 ⊙ 表示点 乘;在ε(f)最小时,训练得到第t帧所需的相关滤波器ft。 5 CN 111583306 A 说 明 书 3/5 页 进一步,所述步骤S3具体包括:读取第t 1帧的图像,在t 1帧的给定搜索区域内找 到目标位置,以上一帧目标位置做中心剪裁搜索区域,并提取其CN、CNN和Hog特征,定为 zt 1,结合ft来计算出最终的第t 1帧的目标响应图Kt 1,表达式为: K =F-1(f︿t ⊙ z︿t 1t 1 ) 其中,f︿t和z︿t 1表示对ft和zt 1进行傅里叶变换,F-1表示逆傅里叶变换; 依据目标响应图Kt 1,得出第t 1帧的实际目标位置。 进一步,所述步骤S4具体包括:对于第t 1帧的目标响应图Kt 1,依据APSR策略和峰 值旁瓣比跟踪质量;其中,APSR定义如下式: 其中,Kmax和Kmin分别是Kt 1的最大值和最小值,峰值附近区域 的平均值和标准差 分别是μ1和σ1;其中,Kt 1非 的范围都记作 τ是给定的参数(τ≈1.0),w和h分别是Kt 1中 像素的横纵坐标,Kw,h是Kt 1的坐标(w,h)的对应数值,mean是求均值函数; 计算APSR的数值,代表跟踪质量,结合峰值旁瓣比,影响第t帧的相关滤波器是否 进行更新。 本发明的有益效果在于: (1)本发明能有效处理目标被遮挡、变形等复杂场景下的跟踪。在实际场景下的视 觉目标跟踪,本发明利用空间惩罚机制来训练相关滤波器,可以得到能有效锁定正确目标 像素的滤波器,也在一定程度上削弱了背景像素的影响。从而所学习到的滤波器就具有了 一定的记忆性,遇到跟踪目标在视线内短暂消失,跟踪器可以确认跟踪对象不再目前的搜 索区域内,将停止更新这个时候的训练模型(避免受背景像素污染),保留了目标正确特征 信息的跟踪器,仍可以在后续帧等待目标重新出现并进行跟踪。 (2)本发明的跟踪算法耗时少。本发明的跟踪速度较快,这既得益于相关滤波算法 的速度优势,也是因为本发明方法优化过程简单直接,基于循环迭代的思路就能快速训练 出理想的滤波模板。 本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并 且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可 以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和 获得。 附图说明 为了使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明作优 选的详细描述,其中: 图1为本发明所述抗遮挡目标跟踪方法的整体工作流程图; 图2为计算第t帧权重图的工作流程图。











