
技术摘要:
本发明公开了一种飞时测距感测系统的控制方法,包括下列步骤:提供具有一特定周期的调变信号,且该调变信号的每一该特定周期被区分为一第一时间区间与一第二时间区间;关闭调变光发射器;于每一个第一时间区间,将光检测器产生的反射信号传递至第一感测电路,使第一感 全部
背景技术:
随着科技的发展,3D感测技术逐渐成熟,并广泛的运用于各种电子产品。飞时测距 (time-of-flight,TOF)为其中一种3D感测技术。举例来说,可将飞时测距感测系统(简称 TOF感测系统)安装于扫地机器人、自驾车、无人搬运车、以及扩增实境(Augmented Reality,AR)游戏的头戴显示器(goggle)等等电子产品中,使电子产品具有3D感测的功能。 请参照图1A与图1B,其所绘示为TOF感测系统的测距及相关信号示意图。TOF感测 系统100包括一调变光发射器(modulated light source)102与一光检测器(photo detector)104。 调变光发射器102根据一调变信号Sm产生一调变光(modulated light)Lm。当调变 光Lm照射至一物件(object)110后会产生一反射光(reflected light)Lr照射至光检测器 104。因此,光检测器104根据接收的反射光Lr产生反射信号Sr。举例来说,反射信号Sr为一 感测电流(sensing current)。 如图1B所示,TOF感测系统100中的调变信号Sm与反射信号Sr会有相同的调变频率 (modulation frequency)与责任周期(duty cycle)。因此,TOF感测系统100即可根据调变 信号Sm与反射信号Sr来计算出相位延迟值Trt,并计算出物件110与TOF感测系统100之间的 距离。基本上,相位延迟值Trt越大时,物件110与TOF感测系统100之间的距离越大。 当然,TOF感测系统中不限定于仅有一个光检测器。TOF感测系统中可包含一光检 测阵列(photo detecting matrix),由M×N(例如240×180)个光检测器排列成。因此,利用 相同的方式,TOF感测系统中的感测电路可计算出M×N个光检测器所对应M×N个相位延迟 值,并且获得物件110表面的3D资讯。 一般来说,在相同的场景下同时存在多个TOF感测系统时,这些TOF感测系统之间 有可能会互相干扰。请参照图2,其所绘示为二个TOF感测系统之间的干扰示意图。其中,第 一TOF感测系统200的第一调变信号Sm与第二TOF感测系统220的第二调变信号Sm'有相同的 调变频率。 如图2所示,第一TOF感测系统200中的调变光发射器202根据第一调变信号Sm产生 第一调变光Lm,而第一调变光Lm照射至物件210后产生第一反射光Lr照射至第一TOF感测系 统200中的光检测器204。同时,第二TOF感测系统220中的调变光发射器222根据第二调变信 号Sm'产生第二调变光Lm'照射至物件210后,除了产生反射光(未绘示)照射至第二TOF感测 系统220中的光检测器224之外,也会产生第二反射光Lr'照射至第一TOF感测系统200中的 光检测器204。 以第一TOF感测系统200的光检测器204为例,光检测器204会同时收到第一反射光 Lr与第二反射光Lr',并据而产生第一反射信号Sr。由于第一调变信号Sm与第二调变信号 4 CN 111580117 A 说 明 书 2/7 页 Sm '具有相同的调变频率,所以光检测器204所产生的第一反射信号Sr会受到第二反射光 Lr'的影响,导致第一TOF感测系统200计算出错误的相位延迟值Trt,而无法正确地得出物 件210与第一TOF感测系统200之间的距离。 同理,第二TOF感测系统220中的光检测器224也会接收到二个反射光(未绘示),所 以第二TOF感测系统220的光检测器224所产生的第二反射信号Sr'也会受到影响,导致第二 TOF感测系统220计算出错误的相位延迟值Trt,而无法正确地得出物件210与第二TOF感测 系统220之间的距离。 一般来说,当多个TOF感测系统发生互相干扰的情况时,可通过改变TOF感测系统 中调变信号的调变频率,使各TOF感测系统中调变信号的调变频率彼此相异,则可避免TOF 感测系统之间发生互相干扰的情况。 以图2为例,假设图2中的第一调变信号Sm与第二调变信号Sm'的调变频率相异时, 在第一TOF感测系统200的光检测器204所产生的第一反射信号Sr中,由第二调变光Lm'所造 成的第二反射光Lr '而产生的反射信号,将被视为恒亮的环境光源(ambient light source)。如此,第一TOF系统200的光检测器204所产生的第一反射信号Sr将不会受到第二 反射光Lr'的影响,而第一TOF感测系统200即可计算出正确的相位延迟值Trt。 同理,第二TOF感测系统220的光检测器224所产生的第二反射信号Sr'也不会受到 第一反射光Lr的影响,而第二TOF感测系统220即可计算出正确的相位延迟值Trt。 然而,在实际的运作时,多个TOF感测系统之间并未进行交握动作(handshaking) 以确认彼此的调变频率是否相异。因此,多个TOF感测系统发生互相干扰的情况还是会发 生。 举例来说,在多人的AR游戏中,多个使用者同时戴上头戴显示器时,头戴显示器上 的TOF感测系统可能会发生互相干扰的情况。或者,在仓库中多台无人搬运车同时运行时, 无人搬运车上的TOF感测系统也可能会发生互相干扰的情况。
技术实现要素:
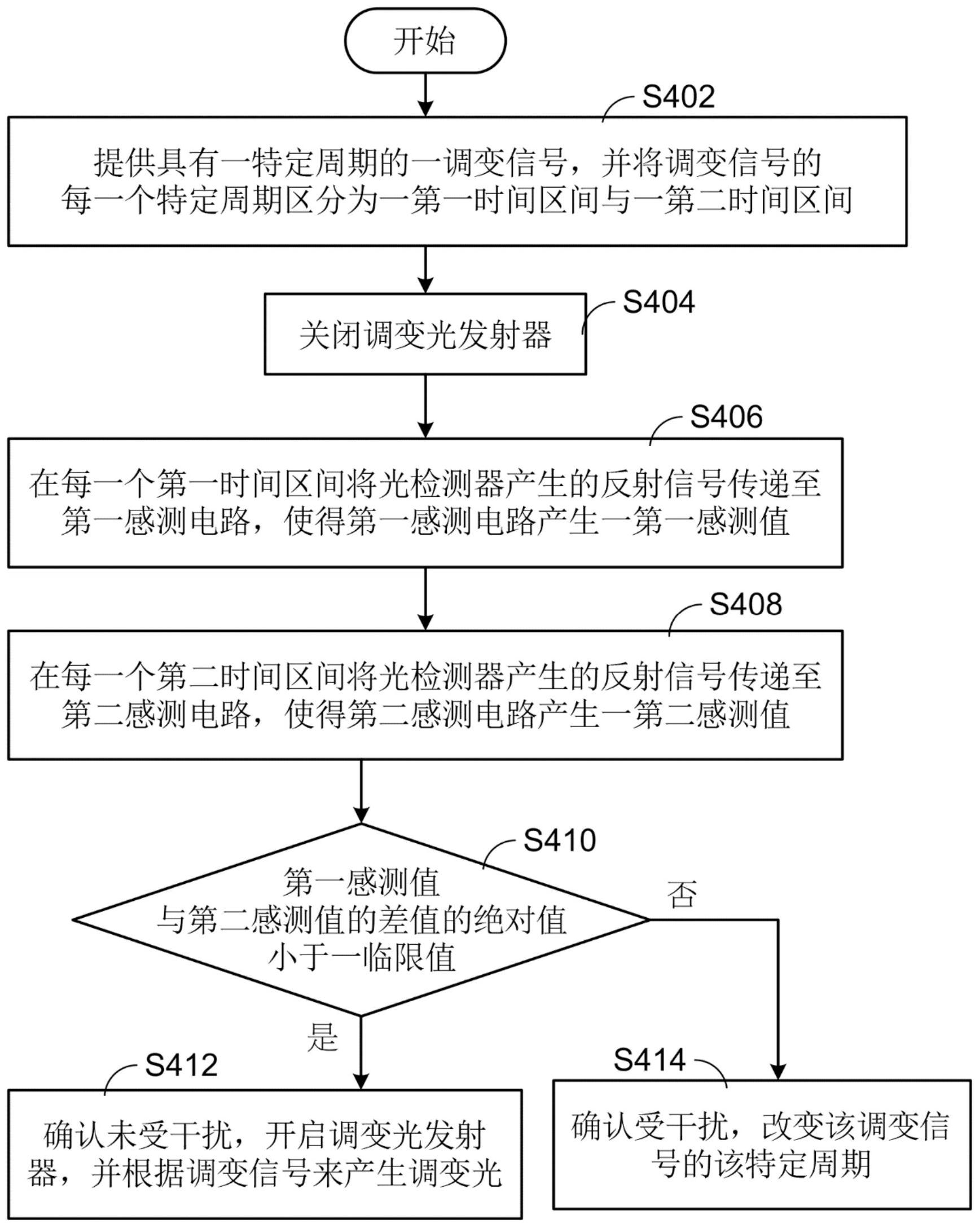
本发明有关于一种飞时测距系统的控制方法,该飞时测距系统具有一调变光发射 器与一光检测器,该控制方法包括下列步骤:提供具有一特定周期的一调变信号,且该调变 信号的每一该特定周期被区分为一第一时间区间与一第二时间区间;关闭该调变光发射 器;于每一该第一时间区间,将该光检测器产生的一反射信号传递至一第一感测电路,使该 第一感测电路产生一第一感测值;于每一该第二时间区间,将该光检测器产生的该反射信 号传递至一第二感测电路,使该第二感测电路产生一第二感测值;根据该第一感测值与该 第二感测值,判断该飞时测距系统是否受到干扰;于确认未受到干扰时,开启该调变光发射 器,使该调变光发射器根据该调变信号产生一调变光;以及于确认受到干扰时,改变该调变 信号的该特定周期。 本发明有关于一种飞时测距系统的控制方法,该飞时测距系统具有一调变光发射 器与一光检测阵列,且该光检测阵列包括多个光检测器连接至对应的多个感测模块,该控 制方法包括下列步骤:提供具有一特定周期的一调变信号,且该调变信号的每一该特定周 期被区分为一第一时间区间与一第二时间区间;关闭该调变光发射器;于每一该第一时间 区间,将该些光检测器产生的反射信号传递至对应感测模块中的一第一感测电路,使对应 5 CN 111580117 A 说 明 书 3/7 页 感测模块中的该第一感测电路产生一第一感测值;于每一该第二时间区间,将该些光检测 器产生的反射信号传递至对应感测模块中的一第二感测电路,使对应感测模块中的该第二 感测电路产生一第二感测值;每一该感测模块根据该第一感测值与该第二感测值,判断是 否受到干扰;判断受到干扰的感测模块的总数是否小于一临限数目;当受到干扰的感测模 块的总数是小于该临限数目时,开启该调变光发射器,使该调变光发射器根据该调变信号 产生一调变光;以及当受到干扰的感测电路的总数是大于该临限数目时,改变该调变信号 的该特定周期。 为了对本发明的上述及其他方面有更佳的了解,下文特举实施例,并配合所附图 式详细说明如下。 附图说明 图1A与图1B为TOF感测系统的测距及相关信号示意图。 图2为二个TOF感测系统之间的干扰示意图。 图3A为TOF感测系统的电路方块示意图。 图3B为TOF感测系统的运作示意图。 图4为本发明第一实施例TOF感测系统的控制方法。 图5为本发明第二实施例TOF感测系统的控制方法。











