
技术摘要:
本发明公开了一种刀具进给速度控制方法、装置及数控加工终端,该方法包括:在设定的处理区域内,根据刀具轨迹对应直线在预定距离处做平行直线,并确定平行直线与预定数量的子区域的交点;分别判断任意相邻两个交点之间的距离是否达到距离阈值;若是,以距离对应的任一 全部
背景技术:
在数控加工领域中,通常会选择球刀对曲面产品进行加工。通常在加工过程中,球 刀与产品之间是点接触的形式,通过球刀刀刃的高速旋转来切除材料。 如图1所示,Ska为刀具(这里为球刀),Prod为待加工的曲面产品,刀具Ska与待加 工的曲面产品Prod的切点G到轴心OH的距离跟曲面产品在G点的法向量与水平面(将相对于 图1中水平方向的平面作为水平面)的夹角β之间呈反比例的关系:夹角β越小,点G到OH的距 离越大;夹角β越大,点G到OH的距离越小。若刀具Ska的转速Vrot及刀具Ska的进给速度Vf都 为定值时,刀具Ska每齿进给量FZ等于进给速度Vf除以转速Vrot乘以刀具Ska的刃数W,即Fz= Vf/(Vrot·W),刀具Ska每齿进给量FZ就为定值(通常在精细加工中,刀具不变)。那么,进给速 度Vf=FZ·Vrot·W=Vrot·π·U,其中,U为刀具Ska切削直径(即2倍的OP)及2倍G点到OH的距 离。 在夹角β的夹角越小,当刀具Ska的转速Vrot一定的情况下,刀具Ska在G点的速度就 越大,在G点加工出来的曲面产品的表面光洁度就越粗糙。因此,在对产品质量要求比较高 的情况下,往往通过在曲面产品的不同区域利用不同的进给速度进行加工。 然而,由于曲面产品在不同区域的中任意两个相邻的区域对应有不同的进给速 度,导致加工后该两个相邻的区域的交界区域的表面光洁程度不同,大大降低了曲面产品 的表面质量。
技术实现要素:
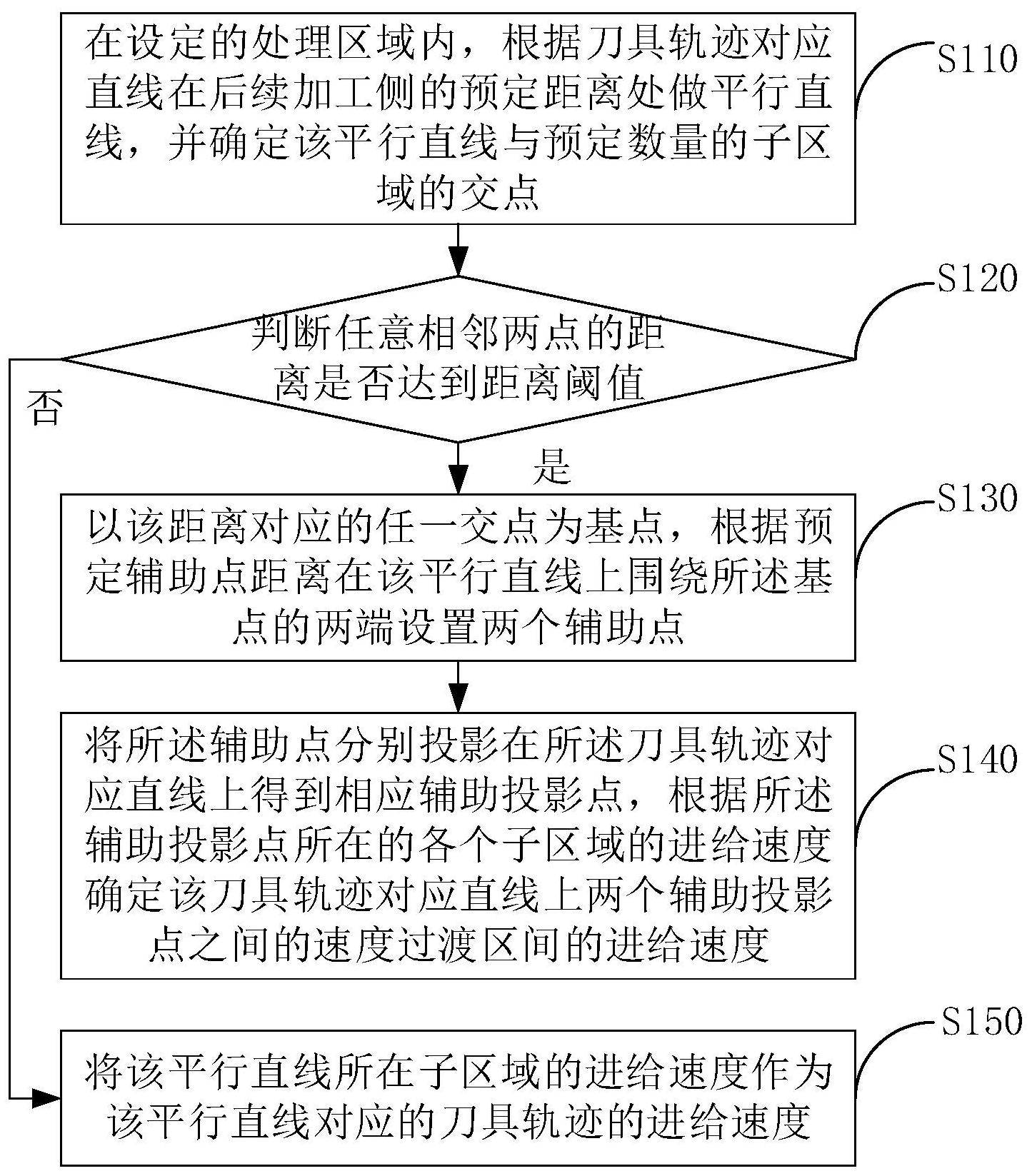
鉴于上述问题,本发明实施例的目的在于提供一种刀具进给速度控制方法、装置 及数控加工终端,以解决现有技术的不足。 根据本发明的一个实施方式,提供一种刀具进给速度控制方法,该方法包括: 在设定的处理区域内,根据刀具轨迹对应直线在后续加工侧的预定距离处做平行 直线,并确定该平行直线与预定数量的子区域的交点,其中,所述预定数量的子区域是通过 预先对待加工产品的表面区域进行划分获得,每一子区域至少包括部分所述待加工产品的 表面区域; 在该平行直线上的所有与子区域的交点及与所述处理区域边缘的交点之中分别 判断任意相邻两点的距离是否达到距离阈值; 若所述距离达到所述距离阈值,以该距离对应的任一交点为基点,根据预定辅助 点距离在该平行直线上围绕所述基点的两端设置两个辅助点; 将所述辅助点分别投影在所述刀具轨迹对应直线上得到相应辅助投影点,根据所 述辅助投影点所在的各个子区域的进给速度确定该刀具轨迹对应直线上两个辅助投影点 4 CN 111552239 A 说 明 书 2/10 页 之间的速度过渡区间的进给速度。 在上述的刀具进给速度控制方法中,所述处理区域的设定方式包括: 分别根据每一子区域在预定坐标系的水平和垂直方向上的最大值及最小值分别 确定每一子区域对应的第一长方形区域; 根据所述待加工产品对应加工程序在所述预定坐标系的水平和垂直方向上的最 大值和最小值确定该加工程序对应的第二长方形区域; 将所有子区域的第一长方形区域与所述第二长方形区域重合的部分作为所述处 理区域。 在上述的刀具进给速度控制方法中,还包括: 若所述平行直线与所述预定数量的子区域无交点,将该平行直线所在子区域的进 给速度作为该平行直线对应的刀具轨迹的进给速度。 在上述的刀具进给速度控制方法中,所述“以该距离对应的任一交点为基点,根据 预定辅助点距离在该平行直线上围绕所述基点的两端设置两个辅助点”包括: 将所述平行直线上与所述基点之间距离二分之一所述预定辅助点距离的两个点 作为两个辅助点。 在上述的刀具进给速度控制方法中,所述“根据所述辅助投影点所在的子区域的 进给速度确定该刀具轨迹对应直线上两个辅助投影点之间的速度过渡区间的进给速度”包 括: 计算两个所述辅助投影点所在子区域的进给速度的均值,将所述均值作为该速度 过渡区间的进给速度。 在上述的刀具进给速度控制方法中,所述“根据所述辅助投影点所在的子区域的 进给速度确定该刀具轨迹对应直线上两个辅助投影点之间的速度过渡区间的进给速度”包 括: 根据所述基点投影在所述刀具轨迹对应直线上的基点投影点将所述速度过渡区 间划分为第一过渡区间及第二过渡区间,其中,第一过渡区间为第一辅助投影点与所述基 点投影点之间的区间,第二过渡区间为所述基点投影点与第二辅助投影点之间的区间; 将两个所述辅助投影点所在子区域的进给速度的均值作为该基点投影点的进给 速度; 在所述第一过渡区间内,将所述第一辅助投影点所在子区域的进给速度及所述基 点投影点的进给速度作为第一过渡区间的最大值及最小值,根据所述第一过渡区间的最大 值及最小值计算第一增量值,并从所述第一辅助投影点到所述基点投影点之间依次将所述 进给速度按照所述第一增量值进行递增或递减; 在所述第二过渡区间内,将所述第二辅助投影点所在子区域的进给速度及所述基 点投影点的进给速度作为第二过渡区间的最大值及最小值,根据所述第二过渡区间的最大 值及最小值计算第二增量值,并从所述基点投影点到所述第一辅助投影点之间依次将所述 进给速度按照所述第二增量值进行递增或递减。 在上述的刀具进给速度控制方法中,所述“根据所述辅助投影点所在的子区域的 进给速度确定该刀具轨迹对应直线上两个辅助投影点之间的速度过渡区间的进给速度”包 括: 5 CN 111552239 A 说 明 书 3/10 页 将所述速度过渡区间划分为预定个数的子区间; 将第一辅助投影点所在子区间的进给速度及第二辅助投影点所在子区间的进给 速度作为该速度过渡区间的最大值及最小值; 根据该速度过渡区间的最大值及最小值计算每一子区间对应的第三增量值; 在所述速度过渡区间内,将第一辅助投影点的进给速度增加或减少第三增量值后 得到第一子区间的进给速度,后续每一子区间均将前一子区间的进给速度增加或减少第三 增量值得到该子区间对应的进给速度。 根据本发明的另一个实施方式,提供一种刀具进给速度控制装置,该装置包括: 交点确定模块,用于在设定的处理区域内,根据刀具轨迹对应直线在后续加工侧 的预定距离处做平行直线,并确定该平行直线与预定数量的子区域的交点,其中,所述预定 数量的子区域是通过预先对待加工产品的表面区域进行划分获得,每一子区域至少包括部 分所述待加工产品的表面区域; 判断模块,用于在该平行直线上的所有与子区域的交点及与所述处理区域边缘的 交点之中分别判断任意相邻两点的距离是否达到距离阈值; 辅助点设置模块,用于若所述距离达到所述距离阈值,以该距离对应的任一交点 为基点,根据预定辅助点距离在该平行直线上围绕所述基点的两端设置两个辅助点; 进给速度确定模块,用于将所述辅助点分别投影在所述刀具轨迹对应直线上得到 相应辅助投影点,根据所述辅助投影点所在的各个子区域的进给速度确定该刀具轨迹对应 直线上两个辅助投影点之间的速度过渡区间的进给速度。 根据本发明的又一个实施方式,提供一种数控加工终端,所述数控加工终端包括 存储器以及处理器,所述存储器用于存储计算机程序,所述处理器运行所述计算机程序以 使所述数控加工终端执行上述的刀具进给速度控制方法。 根据本发明的再一个实施方式,提供一种计算机可读存储介质,其存储有上述的 数控加工终端中所使用的所述计算机程序。 本公开的实施例提供的技术方案可以包括如下有益效果: 本发明中一种刀具进给速度控制方法、装置及数控加工终端,在不改变加工过程 中其他硬件成本的条件下,在任意不同的相邻子区域之间设置速度过渡区间,并根据该相 邻子区域的进给速度确定该速度过渡区间内的进给速度,避免不同相邻子区域之间由于进 给速度不同造成的曲面产品表面光洁度不均匀,提高曲面产品的表面加工质量,增加曲面 产品加工行业的竞争力。 为使本发明的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合 所附附图,作详细说明如下。 附图说明 为了更清楚地说明本发明的技术方案,下面将对实施例中所需要使用的附图作简 单地介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对本发明 保护范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根 据这些附图获得其他相关的附图。 图1示出了现有的曲面产品加工示意图。 6 CN 111552239 A 说 明 书 4/10 页 图2示出了本发明第一实施例提供的一种刀具进给速度控制方法的流程示意图。 图3示出了本发明第一实施例提供的一种待加工产品划分的子区域的结构示意 图。 图4示出了本发明第一实施例提供的一种子区域对应第一长方形区域的结构示意 图。 图5示出了本发明第一实施例提供的一种加工程序对应的第二长方形区域的结构 示意图。 图6示出了本发明第一实施例提供的一种处理区域的结构示意图。 图7示出了本发明第一实施例提供的一种相邻子区域之间速度过渡区间的进给速 度的分析结构示意图。 图8示出了本发明第一实施例提供的一种确定速度过渡区间的进给速度示意图。 图9示出了本发明第一实施例提供的另一种确定速度过渡区间的进给速度示意 图。 图10示出了本发明第四实施例提供的一种刀具进给速度控制装置的结构示意图。 主要元件符号说明: 400-刀具进给速度控制装置;410-交点确定模块;420-判断模块;430-辅助点设置 模块;440-进给速度确定模块。











