
技术摘要:
本发明公开了一种基于惯性/天文组合导航应用的折射星优选方法及系统,充分考虑导航星的空间构型,观星时长与星敏感器调姿时长,地球/航天器/恒星的几何关系,强光源规避,星敏感器视场角和折射星光的折射高度等约束影响,观星时间满足设定的观星时长和星敏感器调姿准备 全部
背景技术:
惯性导航技术,即利用加表、陀螺仪等惯性器件测量弹体的视加速度和角速度等 信息,经过弹载计算机积分运算后输出弹体实时的飞行状态。由于惯性导航系统内部存在 陀螺仪漂移,加表零偏、随机游走等误差因素,其导航误差随时间积累。虽然近年来惯性系 统和器件得到了长足发展,但是一方面高精度惯性系统成本高功耗大体积大,另一方面其 误差积累的性质没有改变。尤其在执行高精度、远航程的任务时惯性系统仍需准确的外部 信息校正误差。 惯性/星光折射组合导航技术是指利用惯性导航和星光导航的导航信息,通过融 合处理获取高精度导航信息的导航技术。通俗地讲,此方法是在惯导积分的基础上,引入天 文导航进行量测更新的组合导航技术。该方法的特点是精度高,尤其适用于远程、长航时的 近地空间飞行器。 当前,已有大量的工作聚焦于星敏感器的形图识别,导航算法等方面,但是没有涉 及折射星的优选问题。星光折射导航的定位精度取决于导航星的空间方位构型和折射角的 大小。理论上,观测折射星的理论最优空间构型是观测到三颗方向矢量相互垂直的折射星; 同时,由于星敏感器侧角误差的存在,折射角越大,组合导航定位精度越高。
技术实现要素:
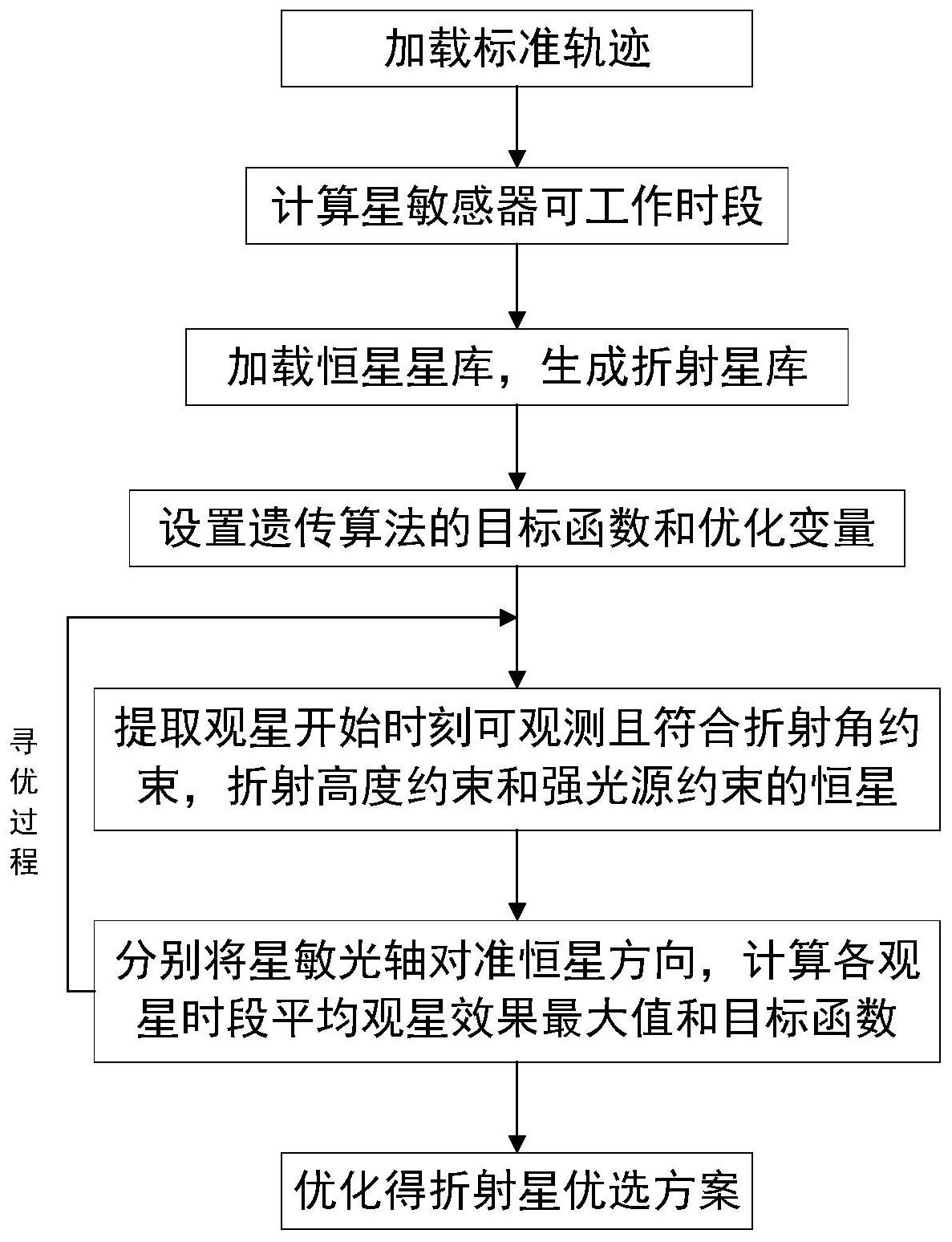
本发明所要解决的技术问题是,针对现有技术不足,提供一种基于惯性/天文组合 导航应用的折射星优选方法及系统,提高组合导航的定位精度。 为解决上述技术问题,本发明所采用的技术方案是:一种基于惯性/天文组合导航 应用的折射星优选方法,包括以下步骤: 1)利用下式生成满足星光折射星等要求的恒星子星库A: 其中,N1~Nn是满足星光折射星等要求的恒星编号,e1~en是与恒星编号相对应的 恒星单位方向矢量; 2)利用恒星子星库A以及下式生成折射星库E: 6 CN 111578934 A 说 明 书 2/14 页 其中,D1~Dn是可观星时段中每一时刻可持续观测Δtl时长的信息矩阵;其中,相 邻时刻之间的间隔为 fr为轨迹信息的采样频率; 3)给出观星时长Δtobs和星敏感器调姿准备时长Δtatti,根据航天器飞行时长设 置观星时段:优化变量设置为2k次观星开始时间为t1、t2、……、t2k,当1≤n≤k第n次观星开 始时间的选择区间是[tua (n-1)·(Δtobs Δtatti) ,tud-(k-n)·Δtatti-(k-n 1)·Δtobs] 当k 1≤n≤2k时,第n次观星开始时间的选择区间是[tda (n-k-1)·(Δtobs Δtatti) ,tdd- (2k-n)·Δtatti-(2k-n 1)·Δtobs],线性约束t1-t2≤-Δtobs-Δtatti、t3-t4≤-Δtobs-Δ tatti;将2k次观星开始时间的选择区间和线性约束作为遗传算法的输入;其中t1、t2、……、 t2k、Δtobs、Δtatti为非负整数;[tua,tud]为升弧段星敏感器可观星时段;[tda,tdd]为降弧段 星敏感器可观星时段;由遗传算法给出一组符合选择区间和线性约束的观星开始时刻,判 断给出的观星开始时刻t1是否可以匹配到E中有折射星的时刻,若否,则令第一个观星时段 观星权重J1=M1;若是,则提取t1时刻的折射星单位方向矢量ei,i=1,2...n且i∈N ,其中N 为正整数集合;将星敏感器主光轴n分别对准恒星方向ei,即令n=ei; 4)分别计算2k次观星得到的权重J1、J2、……、J2k,令目标函数J=J1 J2 …… J2k; 5)将目标函数J作为遗传算法的输入,得到一组优化结果[T1T2……T2k],找到时刻 T1、T2、……、T2k观测到的最大折射角对应的折射星方向矢量 2k个观 星开始时刻的姿态即为n1、n2、……、n2k。 本发明中,M1=10~60。无可观测折射星情况下的惩罚函数M1可以使观星方案向着 提高导航精度的方向优化。 将每一历元可持续观测的折射星筛选出来,避免重复计算,便于折射星方案的选 择,步骤2)的具体实现过程包括: 1)间隔 遍历可观星时段[tua,tud]和[tda,tdd],计算恒星子星库A中恒星反方向 的单位方向矢量-e与当前时刻航天器的位置矢量rn的地心夹角θ,以及地心夹角θ的极大值 θmax和极小值θmin;筛选出恒星子星库A中地心夹角θ满足以下要求的恒星:θmin≤θ≤θmax;对 于地心夹角θ满足要求的恒星,筛选出恒星星光折射高度hg满足以下条件的恒星:hmax,0≥hg ≥hmin,0;其中,hmax,0、hmin,0分别为折射高度上限和折射高度下限;将满足恒星星光折射高度 要求的恒星的轨迹时刻、星号、单位方向矢量、折射高度记录写入信息矩阵B: 其中tn是当前计算的轨迹时刻;Nn1~Nnm是tn时刻满足hg=|rn|sin θ-Re的恒星编号,en1~enm和hn1~hnm是与恒星编号Nn1~Nnm对应的恒星单位方向矢量和折射 7 CN 111578934 A 说 明 书 3/14 页 高度;Re为地球平均半径; 2)提取信息矩阵B中恒星的方向矢量e,根据下式计算恒星与太阳、月球的夹角是 否满足强光源规避条件: 其中θsun是太阳规避角,θmoon是月球规避角,esun 是太阳的地心矢径,emoon是月球的地心矢径;将B中符合强光源规避条件的恒星信息写入信 息矩阵C: 其中,Na1~Nab是tn时刻符合强光源规避条件的恒星编 号,ea1~eab和ha1~hab分别是与恒星编号Na1~Nab对应的恒星单位方向矢量和折射高度; 3)给出观星持续时间Δtl,判断信息矩阵C中tn对应的折射星编号集合S0和tn Δtl 时刻的恒星编号集合 是否相同:相同则tn时刻折射星信息不变,写入信息矩阵D;不相同 则计算 将Sl中恒星编号对应的恒星信息写入D: 其 中,D是tn时刻可持续观测Δtl时长的折射星信息矩阵,Nn1~Nnm、en1~enm和hn1~hnm分别是D 内的折射星编号、恒星单位方向矢量和折射高度; 4)以 为间隔,遍历[tua,tud-Δtl]和[tda,tdd-Δtl]时段的所有时刻,将折射星 信息写入折射星库E: D1~Dn是可观星时段中每一时刻可持续观测Δtl时长的折 射星信息矩阵。 星敏感器在一定的高度范围可以精确工作,超出此范围则精度降低,因此本发明 设定可观星时段[tua,tud]和[tda,tdd]符合Hmin≤H≤Hmax;其中,Hmax、Hmin分别为星敏感器工作 的高度上限和下限。 地心夹角 地心夹角θ的极大值θmax和极小值θmin的计算公式为: 通过以上步骤可以判断可观测的恒星星光是否经过地 8 CN 111578934 A 说 明 书 4/14 页 球大气的折射。 为了进一步确保全程观星效果,有效提高组合导航的定位精度,本发明步骤4)的 具体实现过程包括: a)给出星敏感器视场角θc,将t1时刻满足条件 的恒星信息写入信息矩 阵F: 其中,N1~Nn是t1时刻满足 的恒星编号,e1~en是与N1~ Nn恒星编号对应的恒星单位方向矢量; b)计算F中折射星的地心夹角θ,判断θmin≤θ≤θmax是否成立,成立则保留F中的折 射星信息,并计算折射高度hg=rsinθ-Re;判断折射高度是否满足hmax≥hg≥hmin,将F中同时 符合折射高度和地心夹 角约束的 恒星编号、单位方向矢量记入信息矩阵 G : 其中,N1~Nm是t1时刻满足θmin≤θ≤θmax的恒星编号,e1~em和hg1~ hgm分别是恒星编号N1~Nm对应的恒星单位方向矢量和折射高度; c)判断G中恒星的方向矢量与强光源地心矢径的夹角是否满足强光源规避条件, 计算符合强光源规避约束的恒星星光折射角: 其中ρ0是高度h0处的标准密度,H是密度标尺高度;将G中符合强光源规避约束的恒星编号, 单位方向矢量和折射角写入信息矩阵I: 其中,N1~Nk是t1时刻满足 的恒星编号,e1~ek和ar1~ark分别是恒星编号对应的恒星单位方向矢量 和折射角;c为大气密度模型的比例系数;k(γ)为折射因子, λ是星敏感器观测折射 星光的波长。 d)提取I中折射角的最大值ar,max,根据下式判断t1时刻观星权重值At1: 9 CN 111578934 A 说 明 书 5/14 页 e)以 为间隔,计算第一个观星时段[t1 t1 Δtobs]内所有时刻的观星权重值At, 其中t∈N ,且t∈[t1 t1 Δtobs],则第一个观星时段平均观星效果 找到观星 权重最大值A1,max和其对应的t1时刻星敏主光轴单位方向矢量n1,判断A1,max是否等于0:若 是,则J1=M1;否则, f)计算第二个观星时段时,写入F矩阵的恒星方向矢量e,在满足 的同 时,还满足e·n1≤0,重复步骤a)~e),得到观星权重J2和t2时刻星敏主光轴的单位方向矢 量n2; 计算第三个观星时段时,写入F矩阵的恒星方向矢量e,在满足 的同时, 还满足 重复步骤a)~e),计算得到观星权重J3和t3时刻星敏主光轴的单位方向矢 量n3; 依此类推,计算第k个观星时段时,重复前述步骤,得到观星权重Jk和tk时刻星敏主 光轴的单位方向矢量nk;则目标函数J=J1 J2 …… Jk;k个观星开始时刻的姿态即为n1、 n2、……、n4。 本发明还提供了一种基于惯性/天文组合导航应用的折射星优选系统,包括计算 机设备;所述计算机设备被编程或配置为执行上述方法的步骤。 与现有技术相比,本发明所具有的有益效果为: 1、本发明考虑了强光源,地球/飞行器/恒星的几何关系,折射高度,星敏感器视场 角等约束条件,计算速度快,导航精度高且完全自动寻优; 2、根据飞行轨迹和恒星星表生成折射星库,在星敏感器工作时段内择优选择观星 时段和观星姿态,确保其全程观星效果,有效提高了组合导航的定位精度。 附图说明 图1星敏的观测位置与折射星之间的几何关系; 图2(a)末端定位误差均方差;图2(b)末端定速误差均方差; 图3为本发明方法流程图。











