
技术摘要:
本发明公开了一种基于浅海多径时延的复合码水声测距方法,采用复合测距码作为同步测距序列,对复合测距码进行调制、滤波处理后循环通过水声多径信道发送,对接收信号及本地已知信号各自进行FFT变换,得到对应的接收信号的频域信噪比估计值、接收及本地信号的自功率谱函 全部
背景技术:
目前,水下航行器(Autonomous Underwater Vehicle,AUV)之间的准确测距与定 位对完成一些重要任务具有不可替代的作用,对实现多个航行器的协同作用等具有重要意 义。然而,面对极其复杂的水声信道,尤其是浅水作业的AUV,基于声呐的测距方法易受到水 声多径、快速时变等因素的影响,且实现原理相对复杂。因此,为了合理采用海洋波导信息, 降低水下特殊环境对测距系统的影响以及单发单收测距系统的复杂度,是实现AUV之间准 确测距的重要研究方向之一。 在海洋环境中,多径效应、宽带散射等海洋波导具有许多独特的特性,其中,多径 效应可以被用于声源定位,具有较好的测距效果。但在浅海环境中,基于多径时延的水声测 距方法在水声信号同步、多径时延检测以及多径时延的正确匹配等实现过程中仍然存在较 大的问题和挑战。首先,在水声测距技术中,常用的测距信号有单频脉冲信号、线性调频信 号、双曲调频信号和伪随机扩频信号等。其中,单频脉冲信号具有简单实用的特点,但此类 信号无法兼顾作用距离和测距分辨率,且抗干扰能力差,无法满足更高的应用需求。与线性 调频和双曲调频信号相比,伪随机扩频信号在时延分辨率方面占有优势,是研究的热点问 题。鉴于此,研究者们提出了将Kasami序列作为扩频序列应用于水声定位系统中,并在地中 海进行相关实验,证实了其优良的抗噪声性能,但Kasami序列不具有理想的自相关特性,用 做测距系统的同步发射序列时,将会降低测距系统的性能。随后,研究者们提出将自相关性 较好的m序列作发射序列应用于水声通信,并提出了快速同步算法,解决了同步过算过程中 的瓶颈问题,但是其同步捕获过程中的运算量仍较大,难以跟踪浅海环境快速时变条件下 的信号变化,难以满足实时性的要求。同时,研究者们提出将M元扩频和码元移位键控扩频 相结合应用于水声同步扩频领域,取得较好的效果。但是M序列的相关特性不理想,很少单 独在水声系统中应用。此外,针对m序列和M序列在脉冲位置调制扩频系统中存在的局限性, 研究者们提出将非周期性自相关性良好的NH序列应用于水声通信系统,并将其与传统的基 于m序列的通信系统进行了比较,验证了其优越性能,但是NH序列更适用于窄带水声扩频系 统。然后,在基于浅海多径时延的水声测距系统中,测距误差主要来源于多径时延的检测, 所以实现多径时延的准确检测对提高测距精度具有重要意义。一般来说,常用的多径时延 检测算法主要有自适应法、互相关法和倒谱法等。其中,自适应法无需发射信号的先验知 识,但为达到高精度的时延估计,需要较长的适应时间,难以满足实时性。倒谱法在理论上 分辨率优于自相关法,但如果信道发生畸变,不同路径之间的相关性下降,倒谱法性能差于 自相关法。为提高多径时延检测的精度,研究者们提出了广义互相关(Generalized Cross- Correlation,GCC)时延估计算法。该算法将权重或窗函数应用于交叉功率谱,抑制噪声功 率。权重主要包括Roth处理器,平滑相干变换(SCOT),相位变换(PHAT)等。GCC算法鲁棒性 5 CN 111580110 A 说 明 书 2/13 页 好、计算量较小且易于实时实现,但其易受浅海环境噪声的影响。针对这个问题,近年来,国 内外学者提出了很多改进的方法。研究者提出了一种基于改进小波阈值函数的GCC时延估 计算法,能有效抑制噪声,减小广义互相关函数的波动,使峰值更加尖锐,但信号的去噪受 小波基选取、分解尺度的限制。同时,研究者提出通过希尔伯特差分方法进一步改善了相关 峰值,但希尔伯特变换需要复杂的递回,运算时间比短时傅里叶变换要长,不利于进行实时 多径时延估计。此外,在基于多径时延的水声测距方法中,正确的将多径时延与传播路径进 行匹配是实现准确测距的前提条件,但是,上述多径时延检测算法均无法确定多径时延是 由海面反射还是由海底反射造成的。
技术实现要素:
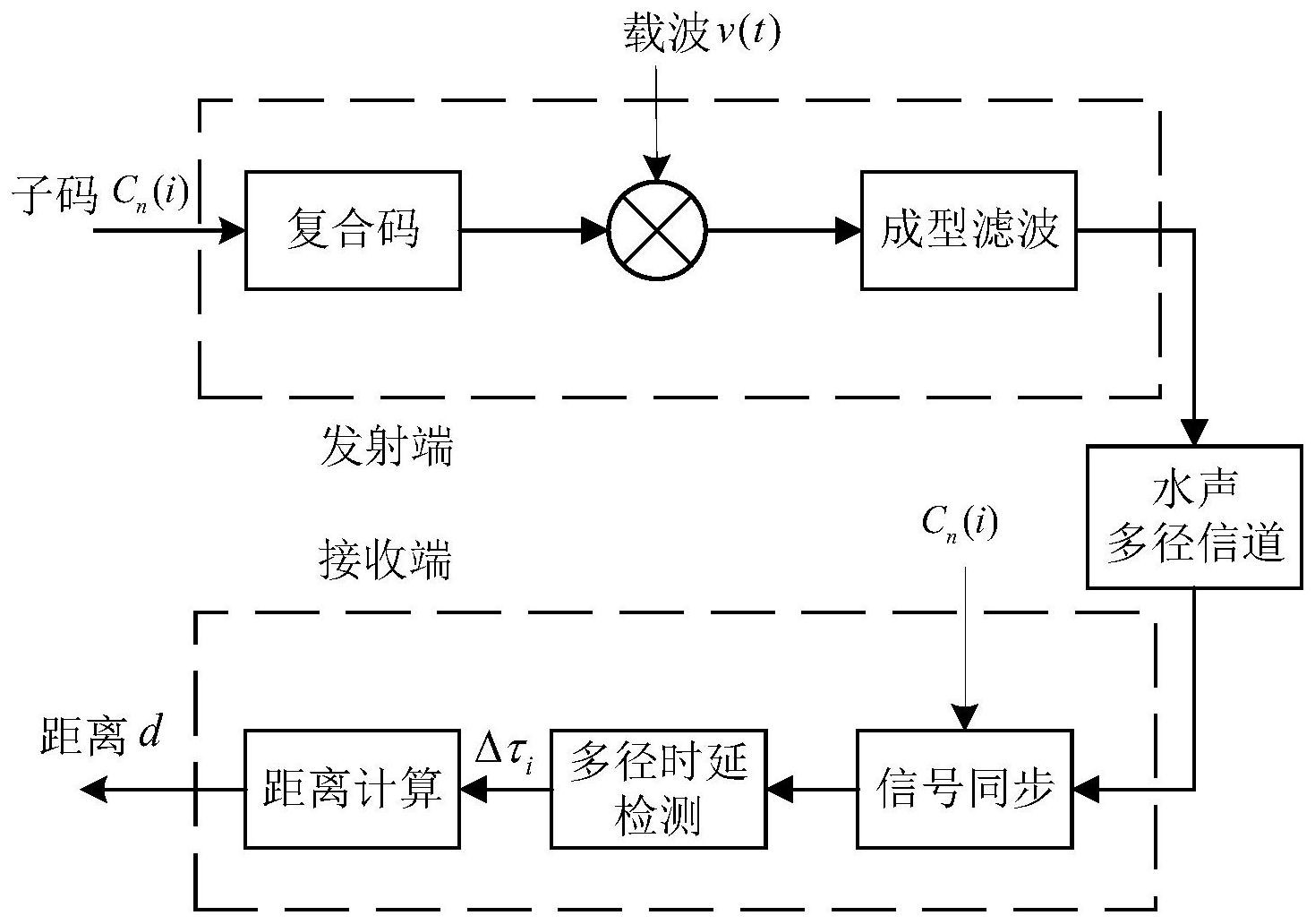
本发明为解决公知技术中存在的技术问题而提供一种抗干扰能力强且准确度高 的基于浅海多径时延的复合码水声测距方法。 本发明为解决公知技术中存在的技术问题所采取的技术方案是:一种基于浅海多 径时延的复合码水声测距方法,采用复合测距码作为同步测距序列,对复合测距码进行调 制、滤波处理后得到测距发射信号,将测距发射信号从发射端循环通过水声多径信道发送 到接收端,在接收端将接收信号解调为复合码水声同步信号;对接收信号及本地信号各自 进行FFT变换,并计算得到对应的接收信号的频域信噪比估计值、接收信号的自功率谱函数 及本地信号的自功率谱函数,由接收信号及本地信号得到两者的互功率谱函数;由频域信 噪比估计值、接收信号的自功率谱函数及本地信号的自功率谱函数建立加权函数,采用加 权函数对互功率谱函数进行频域加权处理,对加权处理后的互功率谱函数进行反傅里叶变 换,对变换后的互功率谱函数的实部进行峰值检测,进而提取多径时延;根据多径时延与不 同传播路径之间的几何关系,由多径时延和已知的地理环境数据计算发射端与接收端之间 的直线距离。 进一步地,设接收信号的自功率谱函数为Gyy(ω),设本地信号的自功率谱函数为 Gxx(ω),设频域信噪比估计值为 建立如下加权函数: 其中,0≤γ≤1,γ的取值与频域信噪比估计值之间的函数关系如下: 其中: γ0、γ1为常数,且γ1>γ0、 具体表达式如下: 6 CN 111580110 A 说 明 书 3/13 页 其中,在浅海环境中应用时,θ0和θ1的具体数值取θ0=0dB,θ1=5dB。 进一步地,根据多径时延与不同传播路径之间的所有匹配情况建立匹配矩阵,由 匹配矩阵得到多径时延与传播路径之间的关系方程组,由关系方程组建立匹配函数,并计 算不同匹配情况下匹配函数值的大小,取匹配函数值为最小值时所对应的多径时延与传播 路径匹配为最佳匹配,根据提取的多径时延以及不同传播路径之间存在的几何关系,由最 佳匹配的多径时延和地理环境数据计算发射端与接收端之间的直线距离。 进一步地,计算发射端与接收端之间的直线距离的具体步骤包括: 步骤A-1,根据提取的多径时延,计算得到多径时延与传播路径之间所有对应的匹 配情况; 步骤A-2,根据多径时延与传播路径之间所有对应的匹配情况建立匹配矩阵,匹配 矩阵中每一行代表一种多径时延与传播路径的匹配情况; 步骤A-3,当多径时延与传播路径相互匹配的时候,根据匹配矩阵写出多径时延与 传播路径之间的关系方程组,设k1~ki表示关系方程组中第1至i个方程; 步骤A-4,采用k1~ki构造匹配函数ε,表述为: 式中,M为多径时延的个数; 步骤A-5,计算不同匹配情况下匹配函数值,所有匹配情况下匹配函数值为最小值 所对应的匹配情况为多径时延与传播路径的正确匹配情况; 步骤A-6,结合提取的多径时延以及不同传播路径之间存在的几何关系,采用正确 匹配的多径时延Δτi和已知的地理环境信息计算收发端之间的直线距离。 进一步地,在发射端对子码进行布尔逻辑组合生成复合测距码;将复合测距码与 正弦载波信号相乘,然后进行二进制相移键控调制,将调制后的复合测距码经成型滤波器 处理得到测距发射信号。 进一步地,在接收端,将解调后的接收信号与本地子码进行滑动相关运算,得到接 收信号与本地子码的相关值实现信号同步,然后对实现信号同步的接收信号做离散傅里叶 变换,将信道带宽平均分成n段,设第i段信道接收信号的平均幅度平方为Ai,i=1,2…n;设 n段的平均幅度平方的平均值为A0;将平均幅度平方值大于A0的若干段作为复合码测距信号 的主频率段,计算其均值,并将该均值作为复合测距码信号功率;将平均幅度平方值小于A0 的若干段作为只包含噪声信号的频率段,计算其均值,并将该均值作为信道环境的噪声功 率;由复合测距码信号功率和信道环境的噪声功率得到接收信号的频域信噪比估计值。 进一步地,由多径时延和已知的地理环境数据计算发射端与接收端之间的直线距 离的方法包括:DS方法、DB方法及DSB方法,设直达路径和一次海面反射路径之间的时延差 为Δτ1,设直达路径和一次海底反射路径之间的时延差为Δτ2,设发射端与接收端之间的直 7 CN 111580110 A 说 明 书 4/13 页 线距离为d; 由Δτ1计算d的方法为DS方法,计算公式如下: 由Δτ2计算d的方法为DB方法,计算公式如下: 由Δτ1、Δτ2计算d的方法为DSB方法,计算公式如下: 其中,D1=2H1,D2=2(H3-H1);c为声速,H1和H2分别为发射端和接收端的深度,H3为 浅海深度。 本发明具有的优点和积极效果是: (1)运算复杂度低:本发明针对水声测距系统中将m序列作为发射序列时,同步捕 获运算量较大的问题,提出将复合码作为同步发射序列应用于水声测距系统,支持接收端 快速、准确地实现水声信号同步。 (2)抗干扰能力强:本发明针对广义互相关多径时延检测算法易受浅海环境噪声 影响的问题,本文提出一种改进加权函数的广义互相关多径时延检测算法,提高了在低信 噪比环境下多径时延检测的准确性。同时,提出将多径时延与传播路径相匹配的方法,并将 其应用于浅海多径时延的复合码水声测距方法中,减小测距方法的误差。 附图说明 图1为本发明的一种的基于浅海多径时延的复合码水声测距方法的工作原理框 图; 图2为本发明的一种加权函数的工作流程图; 图3为本发明的一种匹配多径时延的距离计算方法的流程图; 图4为基于浅海多径时延复合码水声测距的本征声线示意图; 图5为复合码水声同步信号的同步捕获错误率示意图; 图6为SNR=-5dB时采用CC多径时延检测方法的性能示意图; 图7为SNR=-5dB时采用PHAT加权函数的GCC多径时延检测算法性能示意图; 图8为SNR=-5dB时采用HB加权函数的GCC多径时延检测算法性能示意图; 图9为SNR=-5dB时采用本发明的多径时延的复合码水声测距方法的性能示意图 图10为改进权值的GCC算法多经时延检测性能比较示意图; 图11为信道A环境下测距方法的性能示意图; 图12为信道B环境下测距方法的性能示意图; 图13为信道C环境下测距方法的性能示意图; 图14为信道D环境下测距方法的性能示意图。 8 CN 111580110 A 说 明 书 5/13 页











