
技术摘要:
本发明涉及一种基于复合微纳米纤维的柔性力敏传感器,该传感器包括外壳及置于所述外壳内微米级图案阵列基底和导电离子凝胶复合微纳米纤维。所述微米级图案阵列基底上设有呈微凸体的光刻图案;所述导电离子凝胶复合微纳米纤维附着在所述微米级图案阵列基底上,该导电离 全部
背景技术:
运动摩擦副状态监测对现代工业机械装备的稳定运行具有非常重要的作用。虽然 摩擦过程的摩擦状态参数主要有摩擦力、摩擦热、摩擦振动等,但是摩擦副的稳定运行往往 直接体现在平稳的摩擦力上,当摩擦副摩擦状态发生变化,摩擦力也随之改变。目前,针对 摩擦副运行状态的监测主要集中在油润滑下,通过对油膜厚度的在线测量来判断油润滑状 态。而针对干摩擦的摩擦副状态的监测主要依赖传感器与系统集成的结构设计,但专门针 对摩擦力传感的器件还很缺乏。 静电纺丝是制造微纳米纤维的快速简便方法,得到的微纳米纤维材料因高比表面 积与高长径比的优势、微纳米纤维之间复杂交错的结构以及对外界应力应变的灵敏响应, 使其成为柔性力敏传感器的理想材料(Lee S , Sasaki D , Kim D , et al . Ultrasoft electronics to monitor dynamically pulsing cardiomyocytes [J] . Nature Nanotechnology , 2019, 14(2): 156-160)。离子凝胶因其高拉伸、高导电以及不挥发性, 不仅应用于柔性电极,也作为柔性传感器件的活性材料(Tee BCK, Wang C, Allen R, Bao Z. An electrically and mechanically self-healing composite with pressure- and flexion-sensitive properties for electronic skin applications [J] . Nature Nanotechnology , 2012, 7: 825.)。因此,本发明期望将二者制备成复合纤维,发挥柔韧 性、灵敏形变,利用纤维之间微接触与形变引起活性材料整体电阻的灵敏变化来传感外界 应力应变。此外结合图案微凸阵列设计,将传感器表面切向摩擦力转变为侧向纤维接触,从 而灵敏探测表面摩擦力。
技术实现要素:
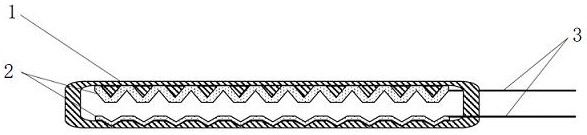
本发明所要解决的技术问题是提供一种实现法向压力和表面切向力传感的基于 复合微纳米纤维的柔性力敏传感器。 本发明所要解决的另一个技术问题是提供该基于复合微纳米纤维的柔性力敏传 感器的制备方法。 为解决上述问题,本发明所述的一种基于复合微纳米纤维的柔性力敏传感器,其 特征在于:该传感器包括外壳及置于所述外壳内微米级图案阵列基底和导电离子凝胶复合 微纳米纤维;所述微米级图案阵列基底上设有呈微凸体的光刻图案;所述导电离子凝胶复 合微纳米纤维附着在所述微米级图案阵列基底上,该导电离子凝胶复合微纳米纤维连有外 接导线。 所述微米级图案阵列基底由聚合物材料构成,该聚合物材料是指聚二甲基硅氧烷 (Polydimethylsiloxane, PDMS)、聚氨酯(Polyurethane, PU)、聚酰亚胺(Polyimide, PI) 4 CN 111595506 A 说 明 书 2/7 页 中的一种或两种。 所述光刻图案是指正方形、圆柱形、矩形条纹、金字塔状中的任意一种微凸体,该 微凸体两两间距在5~500 μm之间,且单个微凸体的边长或直径尺寸在1~300 μm之间。 所述导电离子凝胶复合微纳米纤维是指在以静电纺丝成形的聚合物微纳米纤维 骨架材料的表面包覆有导电离子凝胶。 所述外接导线是指漆包线、铝箔、铜箔中的一种金属导线。 如上所述的一种基于复合微纳米纤维的柔性力敏传感器的制备方法,包括以下步 骤: ⑴将聚合物材料利用光刻法制备得到带有呈微凸体光刻图案的微米级图案阵列基底, 并将所述微米级图案阵列基底裁剪成40×30×1 mm的矩形片后贴在收集装置上; ⑵将静电纺丝用聚合物溶质完全溶解于溶剂中,得到质量浓度为5~50 wt%的溶液,该 溶液转移至注射器中,经注射泵对所述微米级图案阵列基底进行静电纺丝,经真空干燥处 理后即得具有聚合物微纳米纤维骨架的基底; ⑶将所述具有聚合物微纳米纤维骨架的基底在离子凝胶前驱液中浸渍吸附2~30分钟, 经紫外光固化5~50分钟,重复3~5次后干燥,即得附着有导电离子凝胶复合微纳米纤维的基 底; ⑷将所述附着有导电离子凝胶复合微纳米纤维的基底连接外接导线(3),并面对面组 装并封装入壳体,即得柔性力敏传感器。 所述步骤⑴中收集装置是指滚筒、平板、转盘、线圈方式中的一种。 所述步骤⑵中静电纺丝用聚合物溶质为聚乳酸(Polylactic acid, PLA)、聚乙二 醇(Polyethylene glycol, PEG)、聚乙烯醇(Polyvinyl alcohol, PVA)、聚乳酸-羟基乙酸 共聚物(Polylactic acid -glycolic acid copolymer , PLGA)、乙基纤维素(Ethye cellulose , EC)、聚偏氟乙烯(Polyvinylidene fluoride , PVDF)、聚苯乙烯 (Polys ty re n e,PS)、聚己内酯(Poly ca p ro la c to n e,PCL)、聚乙烯吡咯烷酮 (Polyvinylpyrrolidone, PVP)中的一种或几种。 所述步骤⑵中静电 纺丝 用聚合物的溶剂为乙醇、水、丙酮、二氯甲烷 (Dichloromethane, DCM)、三氯甲烷、四氢呋喃(Tetrahydrofuran, THF)、苯、甲苯、N,N-二 甲基甲酰胺(Dimethylformamide,DMF)、N,N-二甲基乙酰胺(Dimethylacetamide, DMAC)中 的一种或几种。 所述步骤⑵中静电纺丝的条件是指环境温度为20℃~27℃、相对湿度为10%~50%、 溶液流速为1 mL/h~4 mL/h、电势差为10 kV~20 kV、纺丝距离为10 cm~20 cm、纺丝时长为 1h~2 h。 所述步骤⑶中离子凝胶前驱液是指将1-丁基-3-甲基咪唑四氟硼酸盐([Bmim] [BF4])5~15g中加入1~5 mL体积浓度为37%的HCl中,用磁力搅拌器搅拌均匀后吹氮气 1 min 再加入0.2~1.2 g硅酸四乙酯(TEOS);充分搅拌 2 h 后将依次加入0.5~2.5 g N,N-二 甲基丙烯酰胺(MBAA)、3~20 mg N,N-二甲基双丙烯酰胺和1~5 mg α-酮戊二酸(2-OA),搅拌 均匀并吹氮气 1 min;密封并用锡箔纸做避光处理;于50℃烘干48 h 后,取出并开封,轻摇 混匀即得;或离子凝胶前驱液是指将3~5 g丙烯酸丁酯(BA)和5~7 g 1-丁基-3-甲基咪唑双 三氟甲磺酰亚胺盐([Bmim][TFSI])混合;加入0.03~0.05 g 2-羟基-2-甲基苯丙酮和1~1.4 5 CN 111595506 A 说 明 书 3/7 页 g己二醇二丙烯酸酯(HDDA),超声 5 分钟至均匀溶解即得。 所述附着有导电离子凝胶复合微纳米纤维的基底面对面组装时,其上复合纤维的骨架 材料是指同种或不同聚合物。 本发明与现有技术相比具有以下优点: 本发明以静电纺丝微纳米纤维为韧性骨架,导电离子凝胶包覆,制成活性传感材料,结 合带有图案阵列设计的柔性基底,利用了复合纤维微形变与微接触产生的压阻机制,实现 柔性传感器法向压力和表面切向力的传感,可应用于表面物体接触时产生的摩擦力传感, 对摩擦副之间摩擦力变化与摩擦状态的监测传感具有重大应用价值。 附图说明 下面结合附图对本发明的











