
技术摘要:
本发明公开一种基于稀疏贝叶斯学习的频控阵雷达离网目标定位方法。首先,根据构造的单基地频控阵雷达收发模型,将发射阵元频偏设置为零,在传统相控阵雷达收发模型下对目标角度进行检测。然后,将发射阵元频偏设置为合适的非零频偏,在获得的目标角度信息的条件下对目 全部
背景技术:
频控阵雷达相对于传统相控阵雷达最大的区别是相邻两个发射阵元之间有一个 远小于参考载频的频率偏移量,使得其阵列因子与距离、角度和时间都有关系。这一特性使 得它在雷达目标定位领域有着巨大的优势。近些年,在目标定位领域最具热点的问题之一 是:采用稀疏贝叶斯学习(SBL:Sparse Bayesian Learning)求解具有离网参数的稀疏模 型,并且在目标的一维角度估计领域已经得到了不错的研究成果。然而,当稀疏贝叶斯模型 从一维扩展到二维时,由于采样网格数的急剧增长,会导致难以承担的算法复杂度。并且在 目标角度距离的二维估计中,由于一部分网格点具有相同的角度或距离,使得这一部分网 格点在稀疏信源矩阵中具有相关性,导致目标定位结果较差。因此研究稀疏贝叶斯学习在 目标角度距离的二维定位中的应用是非常必要的。
技术实现要素:
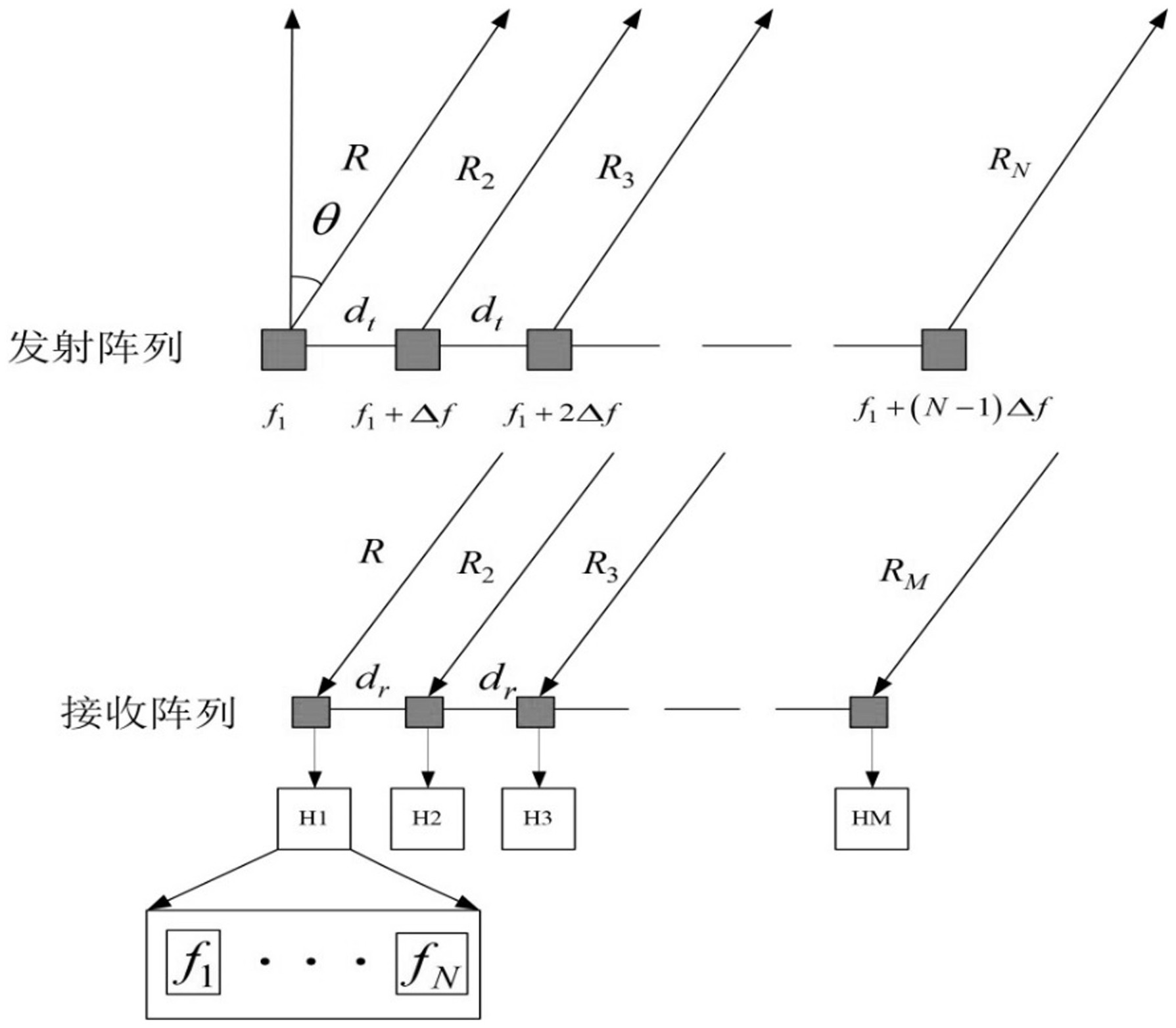
本发明所要解决的技术问题是提供一种基于稀疏贝叶斯学习的频控阵雷达离网 目标定位方法。 为解决上述问题,本发明是通过以下技术方案实现的: 一种基于稀疏贝叶斯学习的频控阵雷达离网目标定位方法,包括以下步骤: 步骤1.构建由N个发射阵元与M个接收阵元组成的单基地频控阵雷达模型; 步骤2.利用步骤1构建的频控阵雷达,将发射阵元频率偏移量设置为零进行角度 域上的目标检测,发射阵元发射信号满足窄带条件,接收阵元接收所有回波信号; 步骤3.将步骤2得到的所有回波信号下变频到基带,并分别进行匹配滤波,分离后 的信号按接收阵元进行重新排列,并通过矢量形式进行表示; 步骤4.将步骤3得到的所有基带回波数据进行采样得到角度观测模型; 步骤5 .对待观测的角度域空间[-π/2 ,π/2]进行均匀采样建立角度网格集 基于角度网格集重构稀疏信号角度估计模型; 步骤6.基于重构稀疏信号角度模型估计角度信源的均值与协方差,并基于角度信 源的均值与协方差更新噪声参数、角度信源参数与目标角度域上的离网参数; 步骤7.判断迭代更新的稀疏角度信源参数是否满足收敛条件或达到最大迭代次 数,若均为否,则返回步骤6,反之,结束迭代; 步骤8.利用步骤6中迭代更新完成后的角度离网参数更新稀疏信号角度估计模型 以获得目标角度信息; 步骤9.利用步骤1构建的频控阵雷达,将发射阵元频率偏移量设置为非零,在步骤 8获得的目标角度基础上分别进行目标距离域上的定位,发射阵元发射信号满足窄带条件, 9 CN 111610512 A 说 明 书 2/17 页 接收阵元接收所有回波信号; 步骤10.重复步骤3,步骤4,得到目标角度上距离观测模型; 步骤11 .对目标角度上感兴趣的距离域空间进行均匀采样建立距离网格集 基于距离网格集重构稀疏信号距离估计模型; 步骤12.基于重构稀疏信号距离模型估计距离信源的均值与协方差,并基于距离 信源的均值与协方差更新噪声参数、距离信源参数与目标距离域上的离网参数; 步骤13.判断迭代更新的信源参数是否满足收敛条件或达到最大迭代次数,若均 为否,则返回步骤12,反之,结束迭代; 步骤14.利用步骤12中迭代更新完成后的距离离网参数更新稀疏信号距离估计模 型以获得目标距离信息; 步骤15.利用步骤8得到的目标角度信息与步骤14得到的目标距离信息完成目标 角度-距离的二维离网目标定位。 步骤1所构建的频控阵雷达的每一个接收阵元都能接收所有发射阵元发出的信 号; 所构建的频控阵雷达的发射阵元的信号频率依次线性增加,第n个阵元发射信号 的载频fn为: fn=f1 (n-1)Δf n=1,2,…,N 式中,f1为频控阵雷达发射阵元的参考载频,Δf为频控阵雷达发射阵元间的频率 偏移量,N为频控阵雷达的发射阵元个数。 步骤2所述构建频控阵雷达,第n个发射阵元发射的窄带信号sn(t)表示为: sn(t)=a(t)exp{j2πfnt},n=1,2,…,N 式中,a(t)为信号复包络,fn为第n个发射阵元的信号载频,t为时间变量; 将发射阵元频偏Δf设置为零,第m个接收阵元接收到的回波信号ym(t)为: 式中,K为目标个数,αk为第k个目标的反射系数,c为波速,τ=2Rk/c为公共时延,f1 为参考阵元载频,t为时间变量,Rk为第k个目标相对于参考阵元的距离,θk为第k个目标与参 考阵元法向的夹角,dt与dr分别为发射阵元与接收阵元的阵元间距,并且令dt=dr=d=c/ 2f1,nm(t)为第m个接收阵元的加性复高斯白噪声。 步骤3的具体步骤为: 步骤3.1.对步骤2得到的所有回波信号下变频到基带进行处理,则第m个接收阵元 接收到的基带回波信号ym(t)为: 式中,ζk为公共相位项exp{-j2πf1(2Rk/c)}与反射系数αk的乘积,不失一般性,将 其重新定义为第k个目标的反射系数并且令ζk=1; 步骤3.2.接收端各阵元利用匹配滤波器组对基带信号进行分离,则第m个接收阵 10 CN 111610512 A 说 明 书 3/17 页 元接收到的信号经匹配滤波输出后,得到由第n个发射阵元发射的信号,此时回波信号yn ,m (t)为: 步骤3.3.对分离后的信号按接收阵元进行重新排列,并通过矢量形式进行表示; y(t)=[y1,1(t) ,…,y1,M(t) ,y2,1(t) ,…,yN,M(t)]T n(t)=[n1,1(t) ,…,n1,M(t) ,n2,1(t) ,…,nN,M(t)]T 并且,令 x(t)=[x1(t) ,x2(t) ,…,xK(t)]T A(θ)=[a(θ1) ,a(θ2) ,…,a(θK)] 式中xk(t)=a(t-2Rk/c),A(θ)为NM×K阶阵列流型矩阵,矩阵中任意一列矢量a (θk)是远场目标点的NM×1维方向矢量; a(θk)=[a1,1(θk) ,…,a1,M(θk) ,a2,1(θk) ,…,a TN,M(θk)] 式中 信号模型可以通过矢量形式表示: y(t)=A(θ)x(t) n(t)。 步骤4的具体步骤为: 对y(t)进行采样,信号模型用矩阵形式表示: Y=A(θ)X N 式中Y=[y(1) ,y(2) ,…,y(T)]为角度观测矩阵,X=[x(1) ,x(2) ,…,x(T)]为角度 信源矩阵,N=[n(1) ,n(2) ,…,n(T)]为噪声矩阵,T为快拍数,A(θ)为角度阵列流型矩阵。 步骤5的具体步骤为: 基于采样角度网格集 重构稀疏信号角度估计模型: Y=Φ(β)S N 式中,Y为稀疏角度观测矩阵,Φ(β)=A Bdiag(β)为稀疏角度阵列矩阵,并简记为 Φ,S为稀疏角度信源矩阵,S的每一列中只有K个非零元素对应于目标角度; β=[β1,β2,…,β TP] ∈[-r/2,r/2]P P为角度域上网格数且满足P>>K, 表示 对 的一阶导数,β为 目标角度域上的离网参数,r为角度域上的采样网格间距, 步骤6基于重构稀疏信号角度模型估计角度信源的均值与协方差,角度信源的均 11 CN 111610512 A 说 明 书 4/17 页 值为: μs(t)=τΣsΦHy(t) ,t=1,2,…,T 式中τ≡σ-2表示噪声精度,σ2为噪声方差,Σs为角度信源的协方差,Φ为稀疏角度 阵列矩阵; 角度信源的协方差为: Σs=(τΦHΦ Λα)-1 式中τ≡σ-2表示噪声精度,σ2为噪声方差,Φ为稀疏角度阵列矩阵,Λα=diag(α), α为角度信源参数; 角度信源参数更新后为: 式中T为快拍数,a与b为关于稀疏角度信源参数αp的Gamma分布参数,||·||2为2范 数,μp(t)为μs(t)中第p个元素,Σpp为Σs主对角线上第p个元素; 噪声参数更新后为: 式中US=[μs(1) ,μs(2) ,…,μs(T)],||·||F表示矩阵的F范数,tr(·)表示矩阵的 迹,c与d为关于噪声参数τ的Gamma分布参数,Σs为角度信源的协方差,Φ为稀疏角度阵列 矩阵; 目标角度域上的离网参数更新后为: 式中 P为半正定矩阵 ,v为矢量参数 ,r为 角度域上的 采样网格间距 , 步骤8所述的更新后的稀疏信号角度估计模型为: Y=Φ(βnew)S N 式中,Y为稀疏角度观测矩阵,Φ(βnew)为步骤6中角度离网参数更新后的稀疏角度 阵列矩阵,S为稀疏角度信源矩阵,N为噪声矩阵; 所述利用步骤6中迭代更新完成后的角度离网参数更新稀疏信号角度估计模型以 获得目标角度信息,具体步骤为: 在步骤6中的角度信源参数α迭代更新完成后,大部分的αp会趋向于无穷大,这就 表示与该αp相关的sp(t)服从均值为零,方差为零的高斯分布,即sp(t)=0; 假设其余K个较小的αp对应的网格坐标为 则最终的目标角度估计可以通过下 式得到: 12 CN 111610512 A 说 明 书 5/17 页 步骤9中将发射阵元频偏Δf设置为非零,得到第m个接收阵元接收的回波信号ym (t)的具体步骤为: 假设在步骤8中获得的角度 方向上存在J个相对于参考阵元的距离分别为Rj(j= 1,2,…,J)的目标点,则: 式中,J为角度 上目标个数,ζj为公共相位项exp{-j2πf1(2Rj/ c)}与目标反射系数αj的乘积,不失一般性,将其重新定义为第j个目标的反射系数并且令ζj =1,c为波速,τ=2Rj/c为公共时延,t为时间变量,Rj为第j个目标相对于参考阵元的距离, f1为参考阵元载频,Δf为频率偏置,此时Δf≠0,dt与dr分别为发射阵元与接收阵元的阵元 间距,并且令dt=dr=d=c/2f1,nm(t)为第m个阵元的加性复高斯白噪声。 步骤10的具体步骤为: 步骤10.1.对步骤9得到的所有回波信号下变频到基带进行处理,则第m个阵元接 收的基带回波信号ym(t)为: 步骤10.2.接收端各阵元利用匹配滤波器组对基带信号进行分离,则第m个接收阵 元接收到的信号经匹配滤波输出后,可得到由第n个发射阵元发射的信号,此时回波信号 yn,m(t)为: 步骤10.3.对分离后的信号按接收阵元进行重新排列,并通过矢量形式进行表示; y1(t)=[y1,1(t) ,…,y1,M(t) ,y2,1(t) ,…,y TN,M(t)] n1(t)=[n1,1(t) ,…,n T1,M(t) ,n2,1(t) ,…,nN,M(t)] 并且,令 x1(t)=[x1(t) ,x2(t) ,…,xJ(t)]T 式中xj(t)=a(t-2Rj/c), 为NM×J维阵列流型矩阵,矩阵中任意一列矢量 是远场目标点 的NM×1维方向矢量; 式中 13 CN 111610512 A 说 明 书 6/17 页 信号模型可以通过矢量形式表示: 步骤10.4对y(t)进行采样,信号模型用矩阵形式表示: 式中,Y1=[y1(1) ,y1(2) ,…,y1(T)]为距离观测矩阵,X1=[x1(1) ,x1(2) ,…,x1 (T)]为距离信源矩阵,N1=[n1(1) ,n1(2) ,…,n1(T)]为噪声矩阵,T为快拍数, 为 目标角度 上距离阵列流型矩阵。 步骤11的具体步骤为: 基于采样距离网格集 重构稀疏信号距离估计模型: Y1=Φ(η)H N1 式中,Y1为稀疏距离观测矩阵,Φ(η)=A1 B1diag(η)为稀疏距离阵列矩阵,并简 记为Φ1,H为稀疏距离信源矩阵,H的每一列中只有J个非零元素对应于目标距离; η=[η1,η2,…,η TL] ∈[-g/2,g/2]L L为距离域上网格数且满足L>>J, 表示 对 的一阶 导数,η为目标距离域上的离网参数,g为距离域上的采样网格间距, 步骤12所述基于重构稀疏信号距离模型估计距离信源的均值与协方差,距离信源 的均值为: μh(t)=τΣhΦ1Hy1(t) ,t=1,2,…,T 式中τ≡σ-2表示噪声精度,σ2为噪声方差,Σh为距离信源的协方差,Φ1为稀疏距 离阵列矩阵; 距离信源的协方差为: Σ =(τΦ1Hh Φ1 Λ -1ρ) 式中τ≡σ-2表示噪声精度,σ2为噪声方差,Φ1为稀疏距离阵列矩阵,Λρ=diag (ρ),ρ为稀疏距离信源参数; 距离信源参数更新后为: 14 CN 111610512 A 说 明 书 7/17 页 式中T为快拍数,a1与b1为关于距离信源参数ρl的Gamma分布参数,||·||2为2范 数,μl(t)为μh(t)中第l个元素,Σll为Σh主对角线上第l个元素; 噪声参数更新后为: 式中UH=[μh(1) ,μh(2) ,…,μh(T)],||·||F表示矩阵的F范数。tr(·)表示矩阵的 迹,c与d为关于噪声参数τ的Gamma分布参数,Σh为距离信源的协方差,Φ1为稀疏距离阵列 矩阵; 目标距离域上的离网参数更新后为: 式中P 1为半正定矩阵 ,v 1为矢量参数,g为距离域上的采样网格间距, 步骤14所述的更新后的稀疏信号距离估计模型为: Y1=Φ(ηnew)H N1 式中,Y1为稀疏距离观测矩阵,Φ(ηnew)为步骤12中参数更新后的稀疏距离阵列矩 阵,H为稀疏距离信源矩阵,N1为噪声矩阵; 所述利用步骤12中迭代更新完成后的距离离网参数更新稀疏信号距离估计模型 以获得目标距离信息,具体步骤为: 在步骤12中的距离信源参数ρ迭代更新完成后,大部分的ρl会趋向于无穷大,这就 表示与该ρl相关的hl(t)服从均值为零,方差为零的高斯分布,即hl(t)=0;假设其余J个较 小的ρl对应的网格坐标为 则最终的目标距离估计可以通过下式得到: 与现有技术相比,本发明具有以下优点: (1)计算简单,易于实现。与传统目标角度距离定位方法相比,本发明无需进行复 杂的二维谱峰搜索,并且可以通过较为粗糙的采样网格减小计算复杂度。 (2)定位精度高。与传统的目标角度距离定位方法相比,本发明在目标偏离采样网 格的情况下,也能对目标角度距离实现高精度的定位,克服了传统算法在目标偏离采样网 格的情况下无法精确定位的不足。 附图说明 图1为由N个发射阵元与M个接收阵元组成的单基地频控阵雷达模型。 15 CN 111610512 A 说 明 书 8/17 页 图2为本发明FDA-OGSBL算法对单个目标进行角度距离估计的仿真结果图。 图3为本发明FDA-OGSBL算法对相同角度不同距离的多目标进行角度距离估计的 仿真结果图。 图4为本发明FDA-OGSBL算法对不同角度不同距离的多目标进行角度距离估计的 仿真结果图。 图5为本发明FDA-OGSBL算法与MUSIC算法,L1-SVD算法估计的目标角度与距离随 SNR变化的RMSE图。 图6为本发明FDA-OGSBL算法与MUSIC算法,L1-SVD算法估计的目标角度与距离随 阵元数变化的RMSE图。











