
技术摘要:
本发明提供了一种船只检测模型训练方法及基于无人机视频的船只跟踪方法,其中,基于无人机视频的船只跟踪方法包括如下步骤:获取无人机采集的视频图像;将所述视频图像输入至预设的船只检测模型,得到船只检测结果;所述预设的船只检测模型是通过船只检测模型的训练方 全部
背景技术:
船只作为一种重要的交通运输工具,被运用到方方面面,为了保证船只的安全,对 船只的监控跟踪必不可少。相关技术中,对船只的跟踪监控方法有卫星追踪定位、AIS系统 追踪。卫星追踪定位价格高昂,AIS系统发射信号范围受限,导致其船只跟踪的范围受限,所 以需要探求一种新的船只跟踪方法。
技术实现要素:
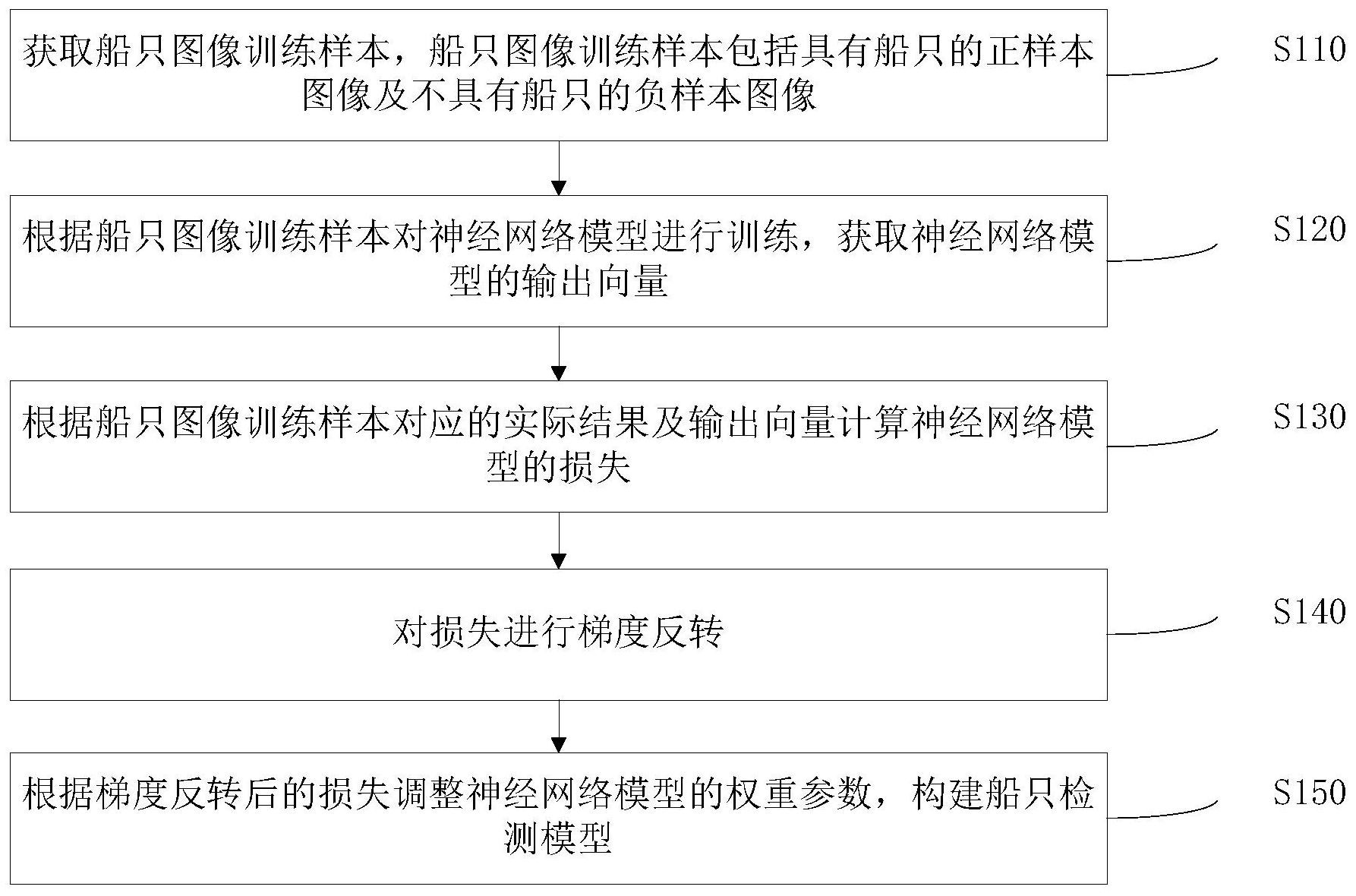
因此,本发明要解决的技术问题在于克服现有技术中的船只跟踪价格高昂以及跟 踪范围小的缺陷,从而提供一种船只检测模型训练方法及基于无人机视频的船只跟踪方 法。 根据第一方面,本发明实施例提供一种船只检测模型训练方法,包括:获取船只图 像训练样本,所述船只图像训练样本包括具有船只的正样本图像及不具有船只的负样本图 像;根据所述船只图像训练样本对神经网络模型进行训练,获取所述神经网络模型的输出 向量;根据所述船只图像训练样本对应的实际结果及所述输出向量计算所述神经网络模型 的损失;对所述损失进行梯度反转;根据梯度反转后的损失调整所述神经网络模型的权重 参数,构建船只检测模型。 结合第一方面,在第一方面第一实施方式中,船只检测模型训练方法还包括:获取 船只图像测试样本,所述船只图像测试样本包括具有船只的正样本图像及不具有船只的负 样本图像;根据所述船只图像测试样本及所述船只检测模型得到测试结果;根据所述测试 结果判断所述船只检测模型的准确率是否高于预设阈值;如果所述船只检测模型的准确率 高于所述预设阈值,将所述船只检测模型确定为可用的船只检测模型。 根据第二方面,本发明实施例提供一种基于无人机视频的船只跟踪方法,包括如 下步骤:获取无人机采集的视频图像;将所述视频图像输入至预设的船只检测模型,得到船 只检测结果;所述预设的船只检测模型是通过第一方面或第一方面任一实施方式所述的船 只检测模型的训练方法训练生成的;将所述船只检测结果利用目标算法进行关联,得到所 述船只的运行轨迹。 结合第二方面,在第二方面第一实施方式中,在所述获取无人机采集的视频图像 之后、将所述视频图像输入至预设的船只检测模型之前,船只检测模型训练方法还包括:对 所述视频图像进行图像增强及去噪处理。 结合第二方面,在第二方面第二实施方式中,所述将所述船只检测结果利用目标 算法进行关联,得到所述船只的运行轨迹的步骤,包括:获取当前视频图像的所述船只检测 结果与下一视频图像的各个所述船只检测结果的匹配权重;选取下一视频图像中匹配权重 4 CN 111553474 A 说 明 书 2/9 页 的最大值所在的所述船只检测结果,进行数据关联;当选取的所述匹配权重的最大值所在 的所述船只检测结果已被关联,则减小所述匹配权重,重新选取下一所述视频图像中与减 小后的所述匹配权重的最大值所在的所述船只检测结果,进行数据关联。 结合第二方面第二实施方面,在第二方面第三实施方式中,所述获取当前视频图 像的所述船只检测结果与下一视频图像的各个所述船只检测结果的匹配权重,包括:获取 船只的运动参数,根据所述运动参数预测所述船只运动轨迹,得到船只预测位置;根据所述 船只预测位置与所述船只检测结果判断运动匹配程度;根据最小余弦距离判断相邻所述船 只检测结果的外观匹配程度;根据所述运动匹配程度和所述外观匹配程度确定所述匹配权 重。 根据第三方面,本发明实施例提供一种船只检测模型的训练装置,包括:样本获取 模块,用于获取船只图像训练样本;向量获取模块,用于根据所述船只图像训练样本对神经 网络模型进行训练,获取所述神经网络模型的输出向量;损失计算模块,用于根据所述船只 图像训练样本对应的实际结果及所述输出向量计算所述神经网络模型的损失;梯度反转模 块,用于对所述损失进行梯度反转;模型构建模块,用于根据梯度反转后的损失调整所述神 经网络模型的权重参数,构建船只检测模型。 根据第四方面,本发明实施例提供一种基于无人机视频的船只跟踪装置,包括:视 频图像获取模块,用于获取无人机采集的视频图像;训练模块,用于将所述视频图像输入至 预设的船只检测模型,得到船只检测结果;所述预设的船只检测模型是通过第一方面或第 一方面任一实施方式所述的船只检测模型的训练方法训练生成的;关联模块,用于将所述 船只检测结果利用目标算法进行关联,得到所述船只的运行轨迹。 根据第五方面,本发明实施例提供一种电子设备,包括存储器、处理器及存储在存 储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现第一方面或第 一方面任一实施方式所述的船只检测模型训练方法或第二方面或第二方面任一实施方式 所述的基于无人机视频的船只跟踪方法的步骤。 根据第六方面,本发明实施例提供一种存储介质,其上存储有计算机指令,该指令 被处理器执行时实现第一方面或第一方面任一实施方式所述的船只检测模型训练方法或 第二方面或第二方面任一实施方式所述的基于无人机视频的船只跟踪方法的步骤。 本发明技术方案,具有如下优点: 1.本实施例提供的船只检测模型训练方法,将损失进行梯度反转形成对抗训练的 效果,对图像级别和感兴趣区域级别进行梯度反转操作,使得训练的神经网络模型既可以 学习到不同船只类型的特征数据,又可以学习到在不同天气情况下,无人机视频图像中的 光线、亮度条件的特征数据,使得训练出的神经网络模型对外界因素的适应性更强。 2.本实施例提供的测试集用于测试训练好的神经网络模型的准确性,选取满足准 确率条件的神经网络模型,给予了神经网络模型选择的指标,有利于神经网络模型的验证 与选择。 3.本实施例提供的基于无人机视频的船只跟踪方法,利用无人机视频输入神经网 络模型进行检测,检测速度快,且检测范围广。仅使用无人机进行跟踪,价格低。 4.本实施例提供的利用运动匹配程度和外观匹配程度确定匹配权重,既考虑了船 只的运动情况,又考虑了外观匹配度,使得到的匹配权重的匹配度更高。 5 CN 111553474 A 说 明 书 3/9 页 附图说明 为了更清楚地说明本发明











