
技术摘要:
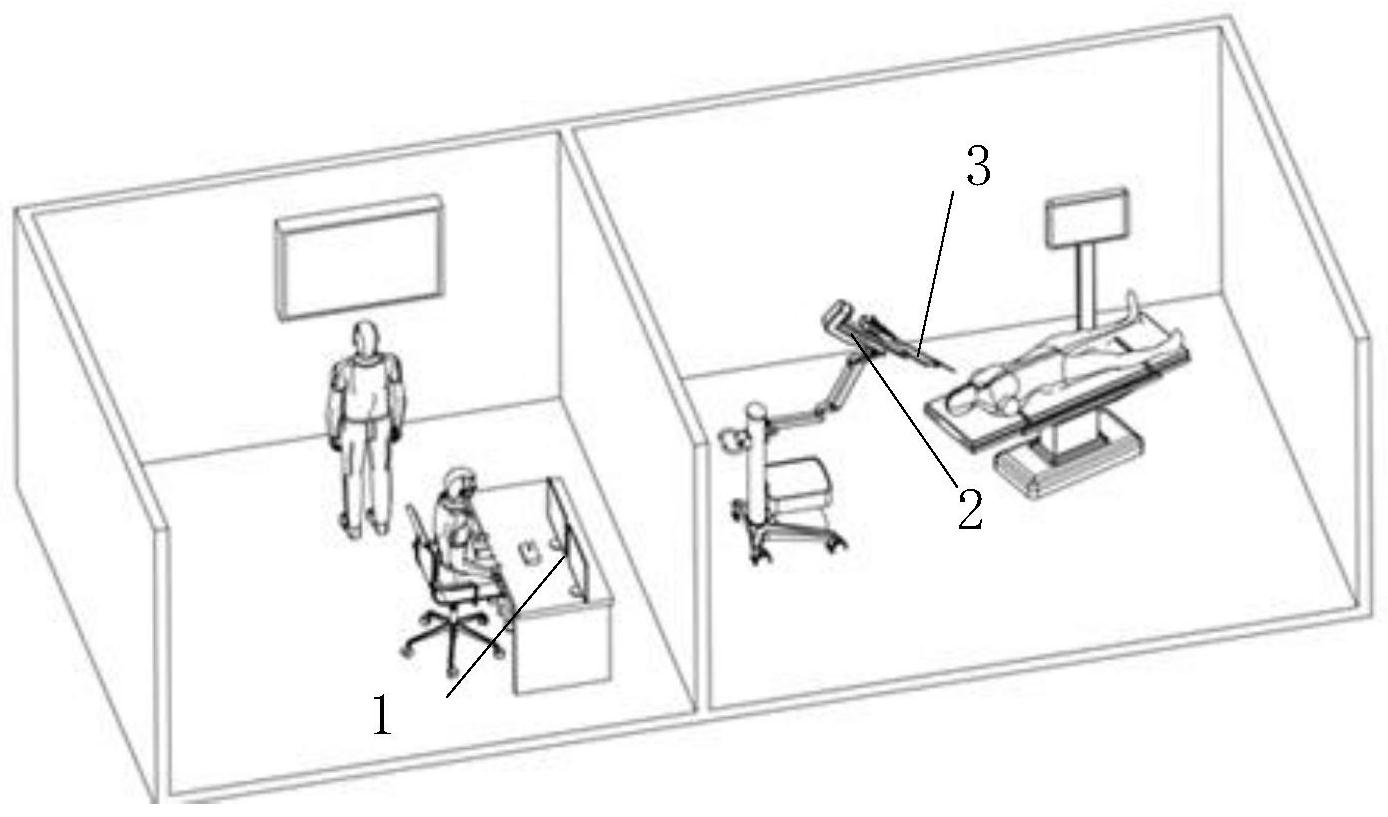
本发明提供一种手术机器人系统,包括:主端、从端和控制端,所述主端包括操作单元,所述从端包括执行驱动件;所述执行驱动件用于驱动一支气管镜运动;所述控制单元分别与所述操作单元及所述执行驱动件通信连接,用于根据获取的操作单元的移动速度信息,控制执行驱动件 全部
背景技术:
支气管镜,例如支气管镜,是一种经口或鼻置入患者下呼吸道的医疗器械,常用于 做肺叶、段及亚段支气管病变的观察、活检采样、细菌学和细胞学检查。利用支气管镜对病 灶所在下呼吸道肺叶进行肺泡盥洗治疗和检查,可以有效提高传染性呼吸道疾病的检出率 与准确度。特别对于新型冠状病毒等疾病,常集中于下呼吸道复制和爆发,通过下呼吸道肺 泡盥洗所获取的标本的核酸检测准确度高于咽拭子检测所获取的标本。而利用支气管镜直 接对肺部进行的灌洗治疗也可缓解下呼吸道的症状。 传统的支气管镜诊治过程需多名医护人员与病患密切接触。而且,危重症患者大 多需要进行气管插管或者气管切开行呼吸机辅助通气,由于支气管镜检查过程中具有较高 的暴露性,导致操作医护人员在进行诊断和治疗过程中容易被感染。因此,本领域需要一种 机器人系统用于呼吸道疾病。
技术实现要素:
本发明的目的在于提供一种手术机器人系统,用于呼吸道疾病。 为解决上述技术问题中的一个或多个,本发明提供一种手术机器人系统,用于呼 吸道疾病,所述手术机器人系统包括:主端、从端和控制端,所述主端包括操作单元,所述从 端包括执行驱动件; 所述执行驱动件用于驱动一支气管镜运动; 所述控制单元分别与所述操作单元及所述执行驱动件通信连接,用于根据获取的 所述操作单元的移动速度信息,控制所述执行驱动件以驱动所述支气管镜移动,根据获取 的所述操作单元的转动角度信息或转动速度信息,控制所述执行驱动件以驱动所述支气管 镜转动。 可选的,在所述的手机机器人系统中,所述控制端包括姿态及位置控制模块,所述 姿态及位置控制模块用于对所述移动速度信息进行主从映射计算,以计算出期望的所述支 气管镜的末端的移动速度,以及用于对所述转动角度信息息进行主从映射计算,以计算出 期望的所述支气管镜的转动速度,并根据所述计算出的期望的移动速度和期望的转动角度 控制所述执行驱动件,或者, 所述控制端包括姿态及位置控制模块,所述姿态及位置控制模块用于对所述移动 速度信息进行主从映射计算,以计算出期望的所述支气管镜的末端的移动速度,以及用于 对所述转动速度信息进行主从映射计算,以计算出期望的所述支气管镜的转动速度,并根 据所述计算出的期望的移动速度和期望的转动速度控制所述执行驱动件。 可选的,在所述的手机机器人系统中,所述执行驱动件包括自转关节、移动关节和 5 CN 111588472 A 说 明 书 2/8 页 旋转关节,所述自转关节用于驱动所述支气管镜自转,所述移动关节用于驱动所述支气管 镜移动,所述旋转关节用于驱动所述支气管镜的导管驱动旋钮以使所述支气管镜的末端旋 转。 可选的,在所述的手机机器人系统中,所述操作单元包括操作手柄,所述操作手柄 包括壳体和相对于所述壳体可活动的操作件,所述姿态及位置控制模块,用于对所述操作 手柄的所述移动速度信息进行主从映射计算,以计算出期望的所述支气管镜的末端的移动 速度,以及用于对所述操作手柄的所述转动角度信息进行主从映射计算,以计算出期望的 所述支气管镜的转动角度。 可选的,在所述的手机机器人系统中,所述操作手柄包括转动控制件和移动控制 件,所述姿态及位置控制模块用于根据所述移动控制件的移动速度信息以及预设的速度映 射比例进行速度映射计算,以计算出期望的所述支气管镜的末端的移动速度,以及用于根 据所述转动控制件的转动角度信息以及预设的位置映射比例进行位置映射计算,以计算出 期望的所述支气管镜的转动角度,并根据所述计算出的期望的移动速度和期望的转动角度 控制所述执行驱动件。 可选的,在所述的手机机器人系统中,所述操作手柄还包括位置传感器和速度传 感器,所述位置传感器与所述控制端通信连接,用于获取所述操作件的转动角度信息并反 馈给所述控制端,所述速度传感器与所述控制端通信连接,用于获取所述操作件的移动速 度信息并反馈给所述控制端。 可选的,在所述的手机机器人系统中,所述操作件包括带有压感的按钮和压力传 感器,所述压力传感器用于获取所述按钮受到的压感信息,并将所述压感信息传输给所述 姿态及位置控制模块,所述姿态及位置控制模块还用于根据接收到的所述压感信息,以及 预设的位置、速度与压感信息之间的标定关系,获得所述移动速度信息和所述转动角度信 息。 可选的,在所述的手机机器人系统中,所述操作单元包括交互界面,所述交互界面 包括导管前伸按键、导管后退按键、向上弯曲按键、向下弯曲按键、向左旋转按键和向右旋 转按键,所述姿态及位置控制模块,用于对所述导管前伸按键、所述导管后退按键、所述向 上弯曲按键、所述向下弯曲按键、所述向左旋转按键和所述向右旋转按键所对应的速度信 息,和速度映射比例,进行主从映射计算,以计算出期望的所述支气管镜的末端的速度。 可选的,在所述的手机机器人系统中,所述交互界面还包括速度选择按钮,所述速 度选择按钮与所述控制端通信连接,用于调整所述速度映射比例。 可选的,在所述的手机机器人系统中,所述主端还包括显示单元,所述显示单元与 所述控制端通信连接,用于显示主端界面,所述主端界面包括所述交互界面。 可选的,在所述的手机机器人系统中,所述主端界面还包括用于显示手术图像的 界面,所述控制端包括图像信号处理及传输模块,所述图像信号处理及传输模块与所述支 气管镜及所述显示单元通信连接,接收来自所述支气管镜的关于手术环境的图像信号,并 对所述图像信号进行处理,以使所述显示单元根据处理后的所述图像信号显示图像。 可选的,在所述的手机机器人系统中,所述主端还包括报警装置,所述控制端还包 括安全控制模块,所述安全控制模块用于监测所述执行驱动件的移动速度与期望的移动速 度是否相匹配,和/或用于监测所述执行驱动件的转动角度与期望的转动角度是否相匹配, 6 CN 111588472 A 说 明 书 3/8 页 若不匹配,则控制所述报警装置报错。 可选的,在所述的手机机器人系统中,所述从端还包括抽吸装置和灌洗液输送装 置,所述灌洗液输送装置与所述支气管镜的注射管连通,用于将灌注液输送至人体目标组 织,所述抽吸装置与所述支气管镜的吸引管连通,用于将人体中的积液抽出体外。 可选的,在所述的手机机器人系统中,所述控制端还包括灌注及抽吸控制模块,所 述灌注及抽吸控制模块与所述抽吸装置及所述灌洗液输送装置通信连接,用于控制所述抽 吸装置和所述灌洗液输送装置的开启以及运行参数。 可选的,在所述的手机机器人系统中,所述操作单元上设置有灌洗液输送按键、抽 吸按键,所述灌洗液输送按键、抽吸按键分别与所述灌注及抽吸控制模块通信连接,用于接 受灌注或抽吸指令。 可选的,在所述的手机机器人系统中,所述操作单元包括通用按键,当所述控制端 感知到所述抽吸装置与所述控制端连接,则所述控制端将所述通用按键映射为用于接收抽 吸指令;当所述控制端感知到所述灌洗液输送装置与所述控制端连接,则所述控制端将所 述通用按键映射为接收灌注指令。 可选的,在所述的手机机器人系统中,所述执行驱动件包括内腔和适配件,所述适 配件可拆卸地设于所述内腔,所述适配件用于将不同型号的所述支气管镜固定于所述执行 驱动件。 可选的,在所述的手机机器人系统中,所述从端包括信息采集单元,所述信息采集 单元设置于所述适配件上,所述信息采集单元用于记录所述支气管镜的类型,所述控制端 包括一存储器,所述存储器存储有包括支气管镜类型和人机交互与控制参数信息的支气管 镜参数数据库,所述控制端还用于从所述信息采集单元获取所述支气管镜的类型后,从所 述支气管镜参数数据库获取对应的人机交互与控制参数信息,以用于所述主端和所述执行 驱动件的主从控制映射关系匹配。 采用本发明提供的所述手术机器系统,将所述主端置于医生端,将所述从端置于 病人端,即可远程遥操作控制支气管镜,无需医生直接操作支气管镜,从而可以显著降低手 术过程中的感染概率。 附图说明 图1为本发明实施例提供的手术机器人系统的组成示意图; 图2为本发明实施例提供的手术机器人系统的交互示意图; 图3为本发明实施例中从端结构示意图; 图4为本发明实施例中支气管镜卡接自检步骤示意图; 图5为本发明实施例中主端界面的界面示意图; 图6为现有技术中支气管镜的示意图。 其中,各附图标记说明如下: 1-主端;2-从端;3-支气管镜;4-控制端;11-操作单元;13-显示单元;111-操作手 柄;112-交互界面;21-执行驱动件;22-固定支架;23-移动台车;24-适配件;31-支气管镜本 体;32-导管;33-注射管;34-吸引管;35-吸引阀门开关;36-导管驱动旋钮;41-姿态及位置 控制模块;42-图像信号处理及传输模块;43-灌注及抽吸控制模块;5-抽吸装置;6-灌洗液 7 CN 111588472 A 说 明 书 4/8 页 输送装置;1121-导管前伸按键;1122-导管后退按键;1123-向上弯曲按键;1124-向下弯曲 按键;1125-向左旋转按键;1126-向右旋转按键;1127-吸痰按键;1128-取样按键。











