
技术摘要:
本发明提供了一种基于距离变换图的碰撞检测方法及装置,方法包括:根据车辆的技术参数,确定车辆模型;对车辆模型进行近似处理,得到至少两个第一动态圆形;根据车辆的规划路径,确定车辆当前的移动方向;根据移动方向,对车辆模型的四个角点进行近似处理,得到两个第 全部
背景技术:
随着人工智能技术以及现代制造业的发展,自动驾驶技术已经逐渐走进人们的日 常生活,潜移默化的改变着人们的出行方式。无人驾驶技术可以简要的分为感知、预测、定 位、决策、规划与控制几个方面。规划通常指路径规划方法,路径规划方法主要是根据当前 车俩信息、合理探索环境空间、最终规划出一条便于控制器执行、无碰撞的路径。 碰撞检测是路径规划任务中不可或缺的一部分,路径规划方法在生成路径时,不 可避免的需要对该路径进行碰撞检验,以保证生成路径的安全性。因此,找到一种快速而可 靠的碰撞检测方法是十分必要的。 目前基于采样的路径规划算法常用的碰撞检测方法大致分为两类: 第一类、将自车模型用多边形进行近似,在需要进行碰撞检测的时刻,将障碍物点 按照相对或绝对位置进行遍历(或排序),利用“射线法”或其它方式,检查是否存在一个或 多个障碍物点位于自车多边形内。若存在,则认为该位置车辆存在碰撞,反之则无碰撞。 第二类、将自车模型用多边形-自车中心点的形式进行近似,自车周围障碍物进行 聚类后也用多边形表示,称为障碍物多边形。在需要进行碰撞检测的时刻,对于每一个障碍 物多边形,检测自车的多边形的每一个角点以及自车中心点,是否位于任何一个待检测的 障碍物多边形中,若存在,则认为该位置车辆存在碰撞,反之则无碰撞。 现有技术中,均通过判断“点是否位于某一多边形区域”的方式进行碰撞判定。这 种方式大多需要对环境障碍物根据其位置进行排序,若不进行排序则更是需要遍历所有障 碍物点才能保证碰撞检测完整、准确。这些操作通常耗时较长,而且这仅仅是对于车辆位于 某一个位置时的一次碰撞检测。 对一条路径的碰撞检测,需要对整条路径上所有的点或绝大部分路点进行碰撞检 测,因此,现有技术虽对每一个路点都进行了严格的碰撞检测,但计算耗时过高往往使得计 算实时性较差。同时,由于很多路点周围很大范围内可能都不存在障碍物点,因此在很多情 况下,对于每一个路点都进行严格的碰撞检测是一种浪费。
技术实现要素:
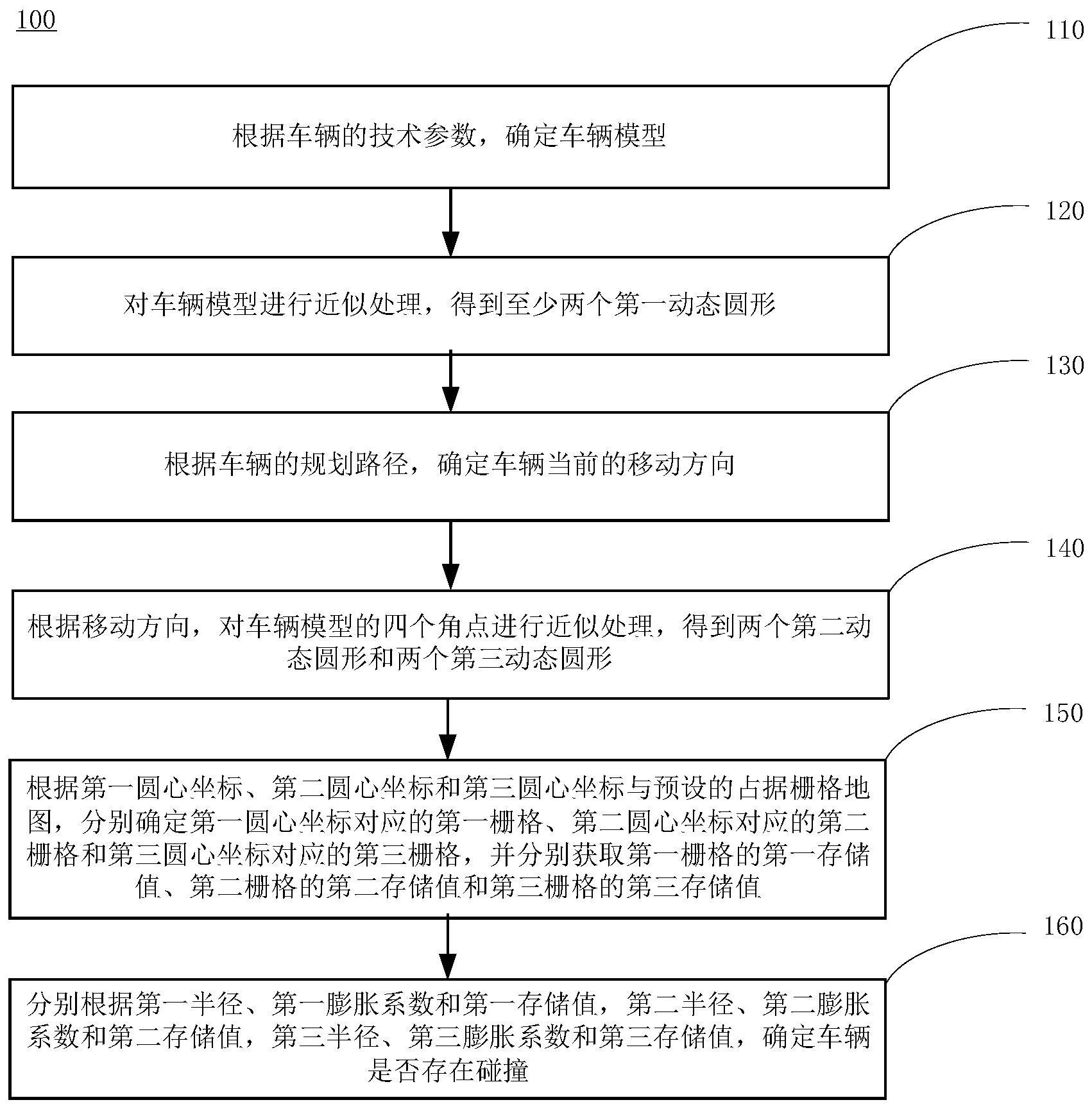
本发明实施例的目的是提供一种基于距离变换图的碰撞检测方法及装置,以解决 现有技术中的路点碰撞检测不严格的问题。 为解决上述问题,第一方面,本发明提供了一种基于距离变换图的碰撞检测方法, 所述方法包括: 根据车辆的技术参数,确定车辆模型; 对所述车辆模型进行近似处理,得到至少两个第一动态圆形;所述第一动态圆形 4 CN 111591288 A 说 明 书 2/8 页 包括第一动态圆形信息,所述第一动态圆形信息包括第一动态圆形的第一圆心坐标、第一 半径和第一膨胀系数; 根据车辆的规划路径,确定车辆当前的移动方向; 根据所述移动方向,对所述车辆模型的四个角点进行近似处理,得到两个第二动 态圆形和两个第三动态圆形;所述第二动态圆形包括第二动态圆形信息,所述第二动态圆 形信息包括第二动态圆形的第二圆心坐标、第二半径和第二膨胀系数;所述第三动态圆形 包括第三动态圆形信息,所述第三动态圆形信息包括第三动态圆形的第三圆心坐标、第三 半径和第三膨胀系数; 根据所述第一圆心坐标、所述第二圆心坐标和所述第三圆心坐标与预设的占据栅 格地图,分别确定所述第一圆心坐标对应的第一栅格、所述第二圆心坐标对应的第二栅格 和所述第三圆心坐标对应的第三栅格,并分别获取所述第一栅格的第一存储值、所述第二 栅格的第二存储值和所述第三栅格的第三存储值; 分别根据所述第一半径、所述第一膨胀系数和所述第一存储值,所述第二半径、所 述第二膨胀系数和所述第二存储值,所述第三半径、所述第三膨胀系数和所述第三存储值, 确定车辆是否存在碰撞。 在一种可能的实现方式中,所述车辆的技术参数包括车辆的长度和宽度。 在一种可能的实现方式中,所述两个第二动态圆形和两个第三动态圆形分别关于 车辆的中心线对称。 在一种可能的实现方式中,所述分别根据所述第一半径、所述第一膨胀系数和所 述第一存储值,所述第二半径、所述第二膨胀系数和所述第二存储值,所述第三半径、所述 第三膨胀系数和所述第三存储值,确定车辆是否存在碰撞,具体包括: 当所述第一半径和所述第一膨胀系数的乘积小于所述第一存储值,且所述第二半 径和所述第二膨胀系数的乘积小于所述第二存储值,且所述第三半径和所述第三膨胀系数 的乘积小于所述第三存储值时,确定车辆不存在碰撞。 在一种可能的实现方式中,所述方法之后,还包括: 判断车辆的场景是否为特殊场景,当为特殊场景时,获取多个障碍物点,并确定所 述障碍物点相对于所述车辆中点的坐标; 根据每个所述障碍物点相对于车辆中点的坐标,对所述障碍物点进行排序; 根据排序结果和车辆模型,确定障碍物点是否存在于车辆模型内; 当所述障碍物点都不存在于车辆模型内时,确定车辆不存在碰撞; 当有一个障碍物点存在于车辆模型内时,确定车辆存在碰撞。 在一种可能的实现方式中,所述第一膨胀系数、第二膨胀系数和第三膨胀系数均 与规划路径的曲率成正比。 在一种可能的实现方式中,所述方法之前还包括: 获取障碍物信息;所述障碍物信息包括多个障碍物点; 确定所述障碍物点在车辆坐标系下的占据栅格地图;所述占据栅格地图包括多个 栅格,每个栅格的存储值为栅格被障碍物点所占据的状态;当所述栅格被障碍物点所占据 时,存储值为0,当所述栅格未被障碍物点所占据时,存储值为距离最近被障碍物点所占据 的栅格的距离。 5 CN 111591288 A 说 明 书 3/8 页 第二方面,本发明提供了一种基于距离变换图的碰撞检测装置,所述基于距离变 换图的碰撞检测装置包括: 确定单元,所述确定单元用于根据车辆的技术参数,确定车辆模型; 处理单元,所述处理单元用于对所述车辆模型进行近似处理,得到至少两个第一 动态圆形;所述第一动态圆形包括第一动态圆形信息,所述第一动态圆形信息包括第一动 态圆形的第一圆心坐标、第一半径和第一膨胀系数; 所述确定单元还用于,根据车辆的规划路径,确定车辆当前的移动方向; 所述处理单元还用于根据所述移动方向,对所述车辆模型的四个角点进行近似处 理,得到两个第二动态圆形和两个第三动态圆形;所述第二动态圆形包括第二动态圆形信 息,所述第二动态圆形信息包括第二动态圆形的第二圆心坐标、第二半径和第二膨胀系数; 所述第三动态圆形包括第三动态圆形信息,所述第三动态圆形信息包括第三动态圆形的第 三圆心坐标、第三半径和第三膨胀系数; 所述确定单元还用于根据所述第一圆心坐标、所述第二圆心坐标和所述第三圆心 坐标与预设的占据栅格地图,分别确定所述第一圆心坐标对应的第一栅格、所述第二圆心 坐标对应的第二栅格和所述第三圆心坐标对应的第三栅格,并分别获取所述第一栅格的第 一存储值、所述第二栅格的第二存储值和所述第三栅格的第三存储值; 所述确定单元还用于,分别根据所述第一半径、所述第一膨胀系数和所述第一存 储值,所述第二半径、所述第二膨胀系数和所述第二存储值,所述第三半径、所述第三膨胀 系数和所述第三存储值,确定车辆是否存在碰撞。 第三方面,本发明提供了一种设备,包括存储器和处理器,存储器用于存储程序, 处理器用于执行第一方面任一所述的方法。 第四方面,本发明提供了一种包含指令的计算机程序产品,当计算机程序产品在 计算机上运行时,使得计算机执行如第一方面任一所述的方法。 第五方面,本发明提供了一种计算机可读存储介质,计算机可读存储介质上存储 有计算机程序,计算机程序被处理器执行时实现如第一方面任一所述的方法。 通过应用本申请提供的基于距离变换的碰撞检测方法及装置,通过“动态圆形”对 车辆进行近似,在距离变换图的基础上,对于每一次碰撞检测,仅需要对有限个圆形进行比 较,不需要考虑障碍物个数等信息,检测速度有很大提升。通过调节“动态圆形”的膨胀系 数,能够灵活的调节碰撞检测容忍度,调节车辆避障时距离障碍物的最小距离,进而调节路 径规划的“风格”。对一些需要精准校验的“关键点”上仍然保证了校验精准度,加快了检测 速度同时,保障搜索解的存在性与检测准确度没有损失。 附图说明 图1为本发明实施例一提供的基于距离变换图的碰撞检测方法流程示意图; 图2为本发明实施例一提供的车辆近似处理后的模型; 图3为本发明实施例一提供的车辆前进时的近似模型; 图4为本发明实施例一提供的车辆倒退时的近似模型; 图5为本发明实施例一提供的特殊场景的近似模型; 图6A为障碍物示意图; 6 CN 111591288 A 说 明 书 4/8 页 图6B为距离变换图; 图6C为距离变换灰度图; 图7为本发明实施例二提供的基于距离变换图的碰撞检测装置结构示意图。











