
技术摘要:
本公开涉及一种传感器外参数标定方法及装置、电子设备和存储介质,所述方法包括:获取视觉传感器采样得到的图像数据,以及获取惯性传感器采样得到的惯性数据;根据所述图像数据,确定所述视觉传感器在所述图像数据中相邻帧图像对应的两个采样时刻之间的第一相对位姿; 全部
背景技术:
视觉传感器与惯性传感器之间的外参数标定技术是目前多传感器融合的重要组 成部分,例如,视觉惯性里程计、同步建图,以及定位技术的重要组成部分。由于视觉传感器 与惯性传感器在空间中是两个分离的传感器设备,因此,二者在空间上存在旋转和平移的 变换关系。在数据采集过程中,由于不同传感器的采集频率和存储时延等原因,所采集的数 据在时间上往往不同步,存在时间偏移。视觉传感器与惯性传感器之间这些不一致的部分 即为视觉传感器与惯性传感器之间的外参数。为了对视觉传感器与惯性传感器进行空间维 度和时间维度的同步,需要对视觉传感器与惯性传感器之间的外参数进行准确标定。
技术实现要素:
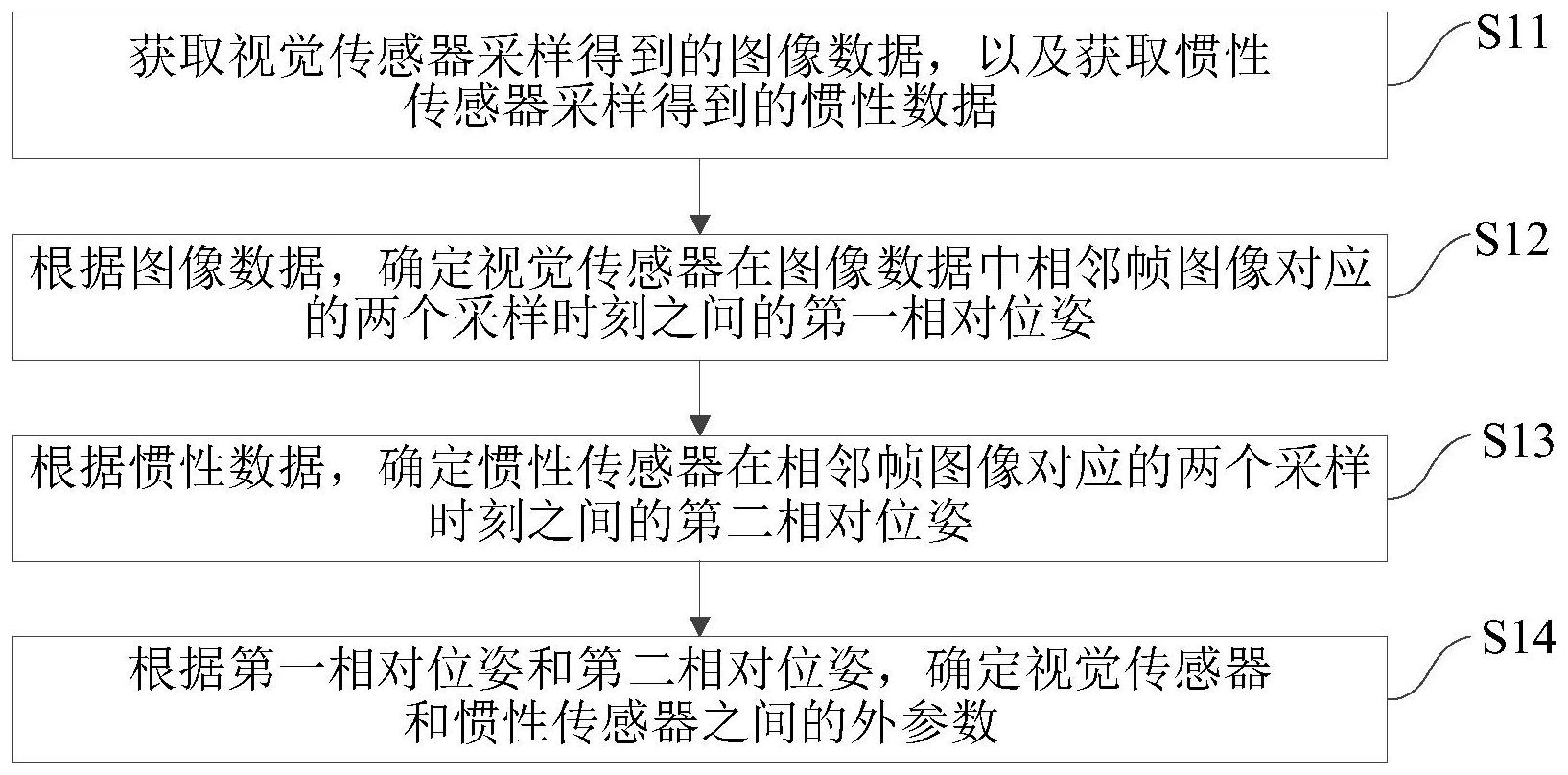
本公开提出了一种传感器外参数标定方法及装置、电子设备和存储介质技术方 案。 根据本公开的一方面,提供了一种传感器外参数标定方法,包括:获取视觉传感器 采样得到的图像数据,以及获取惯性传感器采样得到的惯性数据;根据所述图像数据,确定 所述视觉传感器在所述图像数据中相邻帧图像对应的两个采样时刻之间的第一相对位姿; 根据所述惯性数据,确定所述惯性传感器在相邻帧图像对应的两个采样时刻之间的第二相 对位姿;根据所述第一相对位姿和所述第二相对位姿,确定所述视觉传感器和所述惯性传 感器之间的外参数。 在一种可能的实现方式中,所述根据所述图像数据,确定所述视觉传感器在所述 图像数据中相邻帧图像对应的两个采样时刻之间的第一相对位姿,包括:确定所述视觉传 感器在所述图像数据中每帧图像的采样时刻的位姿;根据所述视觉传感器在每帧图像的采 样时刻的位姿,确定所述第一相对位姿。 在一种可能的实现方式中,所述根据所述惯性数据,确定所述惯性传感器在相邻 帧图像对应的两个采样时刻之间的第二相对位姿,包括:通过对相邻帧图像对应的两个采 样时刻之间的所述惯性数据进行积分,确定所述惯性传感器在相邻帧图像对应的两个采样 时刻之间的第三相对位姿;根据所述视觉传感器和所述惯性传感器之间的初始时间偏移参 数和所述第三相对位姿,确定所述第二相对位姿。 在一种可能的实现方式中,所述根据所述第一相对位姿和所述第二相对位姿,确 定所述视觉传感器和所述惯性传感器之间的外参数,包括:通过最小化所述第一相对位姿 和所述第二相对位姿之间的差值,确定所述视觉传感器和所述惯性传感器之间的外参数。 在一种可能的实现方式中,所述第一相对位姿包括所述视觉传感器在相邻帧图像 对应的两个采样时刻之间的第一相对位置,所述第二相对位姿包括所述惯性传感器在相邻 5 CN 111551191 A 说 明 书 2/13 页 帧图像对应的两个采样时刻之间的第二相对位置;所述通过最小化所述第一相对位姿和所 述第二相对位姿之间的差值,确定所述视觉传感器和所述惯性传感器之间的外参数,包括: 通过最小化所述第一相对位置和所述第二相对位置之间的差值,确定所述视觉传感器和所 述惯性传感器之间的外参数。 在一种可能的实现方式中,所述第一相对位姿包括所述视觉传感器在相邻帧图像 对应的两个采样时刻之间的第一相对旋转信息,所述第二相对位姿包括所述惯性传感器在 相邻帧图像对应的两个采样时刻之间的第二相对旋转信息;所述通过最小化所述第一相对 位姿和所述第二相对位姿之间的差值,确定所述视觉传感器和所述惯性传感器之间的外参 数,包括:通过最小化所述第一相对旋转信息和所述第二相对旋转信息之间的差值,确定所 述视觉传感器和所述惯性传感器之间的外参数。 在一种可能的实现方式中,所述方法还包括:根据所述第一相对位姿,确定所述视 觉传感器在相邻帧图像对应的两个采样时刻之间的第一相对速度;根据所述第二相对位 姿,确定所述惯性传感器在相邻帧图像对应的两个采样时刻之间的第二相对速度。 在一种可能的实现方式中,所述根据所述第一相对位姿和所述第二相对位姿,确 定所述视觉传感器和所述惯性传感器之间的外参数,包括:通过最小化所述第一相对速度 和所述第二相对速度之间的差值,确定所述视觉传感器和所述惯性传感器之间的外参数。 在一种可能的实现方式中,所述视觉传感器和所述惯性传感器之间的外参数包括 下述至少之一:所述视觉传感器和所述惯性传感器之间的平移参数、所述视觉传感器和所 述惯性传感器之间的旋转参数、所述视觉传感器和所述惯性传感器之间的时间偏移参数、 所述惯性传感器对应的加速度计零偏参数,以及所述惯性传感器对应的陀螺仪零偏参数。 根据本公开的一方面,提供了一种传感器外参数标定装置,包括:获取模块,用于 获取视觉传感器采样得到的图像数据,以及获取惯性传感器采样得到的惯性数据;第一确 定模块,用于根据所述图像数据,确定所述视觉传感器在所述图像数据中相邻帧图像对应 的两个采样时刻之间的第一相对位姿;第二确定模块,用于根据所述惯性数据,确定所述惯 性传感器在相邻帧图像对应的两个采样时刻之间的第二相对位姿;外参数标定模块,用于 根据所述第一相对位姿和所述第二相对位姿,确定所述视觉传感器和所述惯性传感器之间 的外参数。 在一种可能的实现方式中,所述第一确定模块,包括:第一确定子模块,用于确定 所述视觉传感器在所述图像数据中每帧图像的采样时刻的位姿;第二确定子模块,用于根 据所述视觉传感器在每帧图像的采样时刻的位姿,确定所述第一相对位姿。 在一种可能的实现方式中,所述第二确定模块,包括:第三确定子模块,用于通过 对相邻帧图像对应的两个采样时刻之间的所述惯性数据进行积分,确定所述惯性传感器在 相邻帧图像对应的两个采样时刻之间的第三相对位姿;第四确定子模块,用于根据所述视 觉传感器和所述惯性传感器之间的初始时间偏移参数和所述第三相对位姿,确定所述第二 相对位姿。 在一种可能的实现方式中,所述外参数标定模块用于:通过最小化所述第一相对 位姿和所述第二相对位姿之间的差值,确定所述视觉传感器和所述惯性传感器之间的外参 数。 在一种可能的实现方式中,所述第一相对位姿包括所述视觉传感器在相邻帧图像 6 CN 111551191 A 说 明 书 3/13 页 对应的两个采样时刻之间的第一相对位置,所述第二相对位姿包括所述惯性传感器在相邻 帧图像对应的两个采样时刻之间的第二相对位置;所述外参数标定模块用于:通过最小化 所述第一相对位置和所述第二相对位置之间的差值,确定所述视觉传感器和所述惯性传感 器之间的外参数。 在一种可能的实现方式中,所述第一相对位姿包括所述视觉传感器在相邻帧图像 对应的两个采样时刻之间的第一相对旋转信息,所述第二相对位姿包括所述惯性传感器在 相邻帧图像对应的两个采样时刻之间的第二相对旋转信息;所述外参数标定模块用于:通 过最小化所述第一相对旋转信息和所述第二相对旋转信息之间的差值,确定所述视觉传感 器和所述惯性传感器之间的外参数。 在一种可能的实现方式中,所述装置还包括:第三确定模块,用于根据所述第一相 对位姿,确定所述视觉传感器在相邻帧图像对应的两个采样时刻之间的第一相对速度;第 四确定模块,用于根据所述第二相对位姿,确定所述惯性传感器在相邻帧图像对应的两个 采样时刻之间的第二相对速度。 在一种可能的实现方式中,所述外参数标定模块用于:通过最小化所述第一相对 速度和所述第二相对速度之间的差值,确定所述视觉传感器和所述惯性传感器之间的外参 数。 在一种可能的实现方式中,所述视觉传感器和所述惯性传感器之间的外参数包括 下述至少之一:所述视觉传感器和所述惯性传感器之间的平移参数、所述视觉传感器和所 述惯性传感器之间的旋转参数、所述视觉传感器和所述惯性传感器之间的时间偏移参数、 所述惯性传感器对应的加速度计零偏参数,以及所述惯性传感器对应的陀螺仪零偏参数。 根据本公开的一方面,提供了一种电子设备,包括:处理器;用于存储处理器可执 行指令的存储器;其中,所述处理器被配置为调用所述存储器存储的指令,以执行上述方 法。 根据本公开的一方面,提供了一种计算机可读存储介质,其上存储有计算机程序 指令,所述计算机程序指令被处理器执行时实现上述方法。 在本公开实施例中,根据视觉传感器采样得到的图像数据,确定视觉传感器在相 邻帧图像对应的两个采样时刻之间的第一相对位姿,以及根据惯性传感器采样得到的惯性 数据,确定惯性传感器在相邻帧图像对应的两个采样时刻之间的第二相对位姿,可以根据 第一相对位姿和第二相对位姿,利用视觉传感器和惯性传感器在运动中相对位姿变化的一 致性,可以快速准确地对视觉传感器和惯性传感器之间的外参数进行标定。 应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,而非 限制本公开。根据下面参考附图对示例性实施例的详细说明,本公开的其它特征及方面将 变得清楚。 附图说明 此处的附图被并入说明书中并构成本说明书的一部分,这些附图示出了符合本公 开的实施例,并与说明书一起用于说明本公开的技术方案。 图1示出根据本公开实施例的传感器外参数标定方法的流程图; 图2示出根据本公开实施例的标定板的示意图; 7 CN 111551191 A 说 明 书 4/13 页 图3示出根据本公开实施例的视觉传感器获取得到的图像数据和惯性传感器获取 得到的惯性数据的示意图; 图4示出根据本公开实施例的传感器外参数标定装置的框图; 图5示出根据本公开实施例的一种电子设备的框图; 图6示出根据本公开实施例的一种电子设备的框图。











