
技术摘要:
本发明公开一种助老起居设备及其控制方法,助老起居设备包括底盘和设置在所述底盘上的椅面,所述椅面后侧转动连接有靠背,所述靠背连接有用于驱动其旋转的第一驱动部件,所述椅面两侧设置有扶手,所述扶手连接有用于驱动其升降的第二驱动部件和驱动其前后平移的第三驱 全部
背景技术:
截至2019年初,我国60岁以上老龄人口已经达到约2.5亿人,占总人口比例为 18%,其中65岁及以上老年人口达1.67亿,占总人口的11.9%。 实行近30年的独生子女政策带来的负面影响之一就是抚养比不断提升,2017年我 国总抚养比达39.2%,老年抚养比达15.9%。老年人口与劳动力人口的比例不断扩大。 随着我国老龄化的逐渐加剧以及抚养比的不断攀升,我国养老行业形势逐渐严 峻,导致养老行业空间巨大,据了解,2019年养老行业规模达4.4万亿,预计2023年规模将达 13万亿,年复合增长率达30%。 在助老设备领域,老年人家居产品设计具有广阔的市场前景,有庞大的用户群体 和有待开发的市场,因此,如何设计出一种既结构简单、造价低廉又可以起到良好的助老效 果的助老起居设备成为亟需解决的问题。 现有的助老座椅主要在医疗、康复器械市场等相关机构中流通,大众市场上传统 舒适性座椅追求入座体感与舒适程度,没有针对老人体征有助老功能的设计;大众市场上 的助老器械考虑到造价与实用性,少采用机电结合控制的方式,多使用机械原理设计结构 实现功能,单一机械机构难以兼顾老人多种行动方式而给与支持;国内外大型的医疗、康复 器械市场中生产的助老座椅多呈现售价高昂,助老功能的设计针对性突出的特点,多用于 医务人员照顾身体有特殊缺陷的病人群体,因此也致使相关功能相对单一。 申请公布号为CN103598954A的专利文件公开了一种可平躺、折叠的轮椅,既可以 折叠,以方便携带,又可以平躺,以满足老年人、残疾人、患者的躺卧需要,然而,老年人行动 不便,但并不会一直在轮椅上,其并不能辅助老年人由站立姿势坐到轮椅上,也无法辅助老 年人从轮椅上站立离开座椅,只能实现躺、坐的转换,助老效果不佳。授权公告号为 CN205321827U的专利文件公开了一种具有联动扶手的靠背座椅,在靠背倾斜过程中,扶手 与靠背联动,然而,其仍旧满足的是躺、坐转化时的辅助,并不能辅助老年人由站立姿势坐 到座椅上,也无法辅助老年人从座椅上站立离开座椅。 综上所述,现有的助老设备造价高,机构复杂,功能单一,不适用于大部分仍然具 有一定活动与生活自理能力的老年人,不利于大规模生产与推广。
技术实现要素:
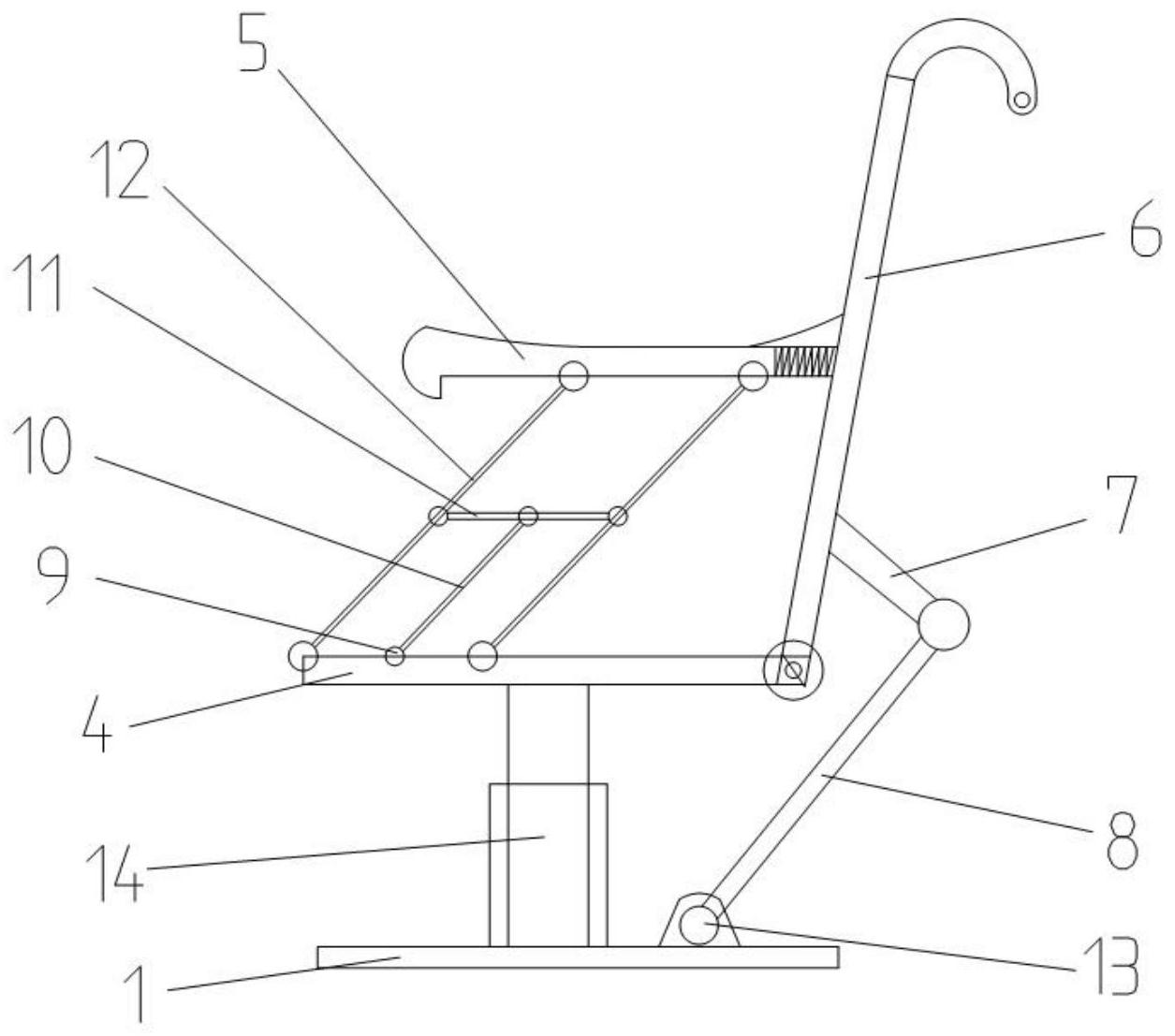
本发明的目的是提供一种助老起居设备,以解决上述现有技术存在的问题,使其 能够满足坐、躺、立等设备姿态的相互转换,从而能够辅助具有一定活动和生活自理能力的 老年人由站立姿势坐到设备上并从设备上站立离开设备。 为实现上述目的,本发明提供了如下方案:本发明提供一种助老起居设备,包括底 盘和设置在所述底盘上的椅面,所述椅面后侧转动连接有靠背,所述靠背连接有用于驱动 4 CN 111568657 A 说 明 书 2/6 页 其旋转的第一驱动部件;所述椅面两侧设置有扶手,所述扶手连接有用于驱动其升降的第 二驱动部件和驱动其前后平移的第三驱动部件。 优选地,所述第一驱动部件包括安装在所述底盘上的第一旋转装置以及首尾铰接 在一起的第一连杆和第二连杆,所述第一连杆铰接在所述靠背的背部,所述第二连杆垂直 固定在所述第一旋转装置的第一旋转轴上,所述第一旋转轴转动时能够带动所述第二连杆 摆动,进而带动所述第一连杆使得所述靠背偏转。 优选地,所述第二驱动部件包括设置在所述扶手与所述椅面之间的辅助站立推 杆;所述辅助站立推杆的前后各设置有一个伸缩杆,所述伸缩杆包括固定部和活动部,所述 固定部铰接在所述椅面上,所述活动部铰接在所述扶手上。 优选地,所述第三驱动部件包括设置在所述椅面两侧的第二旋转装置,所述辅助 站立推杆的底端垂直固定在所述第二旋转装置的第二旋转轴上,所述辅助站立推杆的顶端 铰接在所述扶手上。 优选地,所述椅面同一侧的两个所述活动部之间设置有第三连杆,所述第三连杆 与所述扶手平行,所述第三连杆的两端分别铰接在所述活动部上,所述辅助站立推杆的顶 端铰接在所述第三连杆上。 优选地,所述椅面和所述底盘之间通过升降装置相互连接。 优选地,所述扶手设置有伸缩装置,所述伸缩装置用于调整扶手的长度。 优选地,所述底盘上设置有行走装置。 优选地,还设置有智能控制系统,所述智能控制系统包括控制模块以及分别与所 述控制模块电连接的语音识别模块、智能导航模块、输出控制模块、控制面板和电源模块, 所述输出控制模块包括行进模块和座椅调节模块,所述行进模块用于控制所述行走装置, 所述座椅调节模块用于控制所述升降装置、辅助站立推杆、第一旋转装置和第二旋转装置。 本发明还提供一种助老起居设备的控制方法,包括如下步骤: (1)所述智能导航模块包括有可旋转的激光发射头和配套接收器,通过所述激光 发射头发射激光,扫描自身到边界每个点的距离,从而生成数字地图,根据居室内家具位置 的变化实时进行更新,在此基础上规划所述助老起居设备的行走路线,并在所述数字地图 上设置所述助老起居设备需要移动到的关键位置点; (2)使用者发出将所述助老起居设备移动到某个关键位置点的语音指令,由语音 识别模块接收识别语音指令并将指令转化成电信号传递到控制模块,控制模块根据接收到 的电信号下达控制指令到行进模块,行进模块根据控制指令控制所述行走装置行走,根据 使用者的需求,将所述助老起居设备移动至相应的所述关键位置点; (3)待将所述助老起居设备移动到所述关键位置点后,使用者发出坐、躺、立的语 音指令或直接操作控制面板, 当使用者发出语音指令时,由语音识别模块接收识别语音指令并将指令转化成电 信号传递到控制模块,控制模块根据接收到的电信号下达控制指令到座椅调节模块,座椅 调节模块根据控制指令相应的控制所述升降装置和/或所述辅助站立推杆和/或所述第一 旋转装置和/或所述第二旋转装置动作,使得所述助老起居设备达到坐或躺或立的状态; 当使用者直接操作控制面板时,由控制面板接收识别操作指令并将指令转化成电 信号传递到控制模块,控制模块根据接收到的电信号下达控制指令到座椅调节模块,座椅 5 CN 111568657 A 说 明 书 3/6 页 调节模块根据控制指令相应的控制所述升降装置和/或所述辅助站立推杆和/或所述第一 旋转装置和/或所述第二旋转装置动作,使得所述助老起居设备达到坐或躺或立的状态; (4)在所述助老起居设备进行坐、躺、立三种状态的切换过程中,使用者能够通过 语音控制模块或控制面板发出随时停止或更改动作的指令,语音控制模块或控制面板在接 收到相应的指令后,重复步骤(3)的过程。 本发明相对于现有技术取得了以下技术效果: (1)本发明的靠背和扶手分别设置有驱动其翻转或升降的第一驱动部件、第二驱 动部件和第三驱动部件,使得靠背和扶手可以独立动作,从而能够根据老年人的身体姿态 进行合理调整设备,更好地辅助老年人坐、躺、立各种姿态的调整; (2)本发明的扶手单独设置有驱动其升降的第二驱动部件,在独立于靠背的动作 的基础上,能够辅助老年人由坐姿转换到站立姿态,并能够辅助老年人由站立姿态缓慢坐 到设备上,达到辅助具有一定活动和生活自理能力的老年人由站立姿势坐到设备上并从设 备上站立离开设备的目的; (3)本发明的靠背通过二级连杆即第一连杆和第二连杆首尾铰接的方式驱动靠背 使其翻转,能够将第一旋转装置设置在椅面下部的底盘上,从而能够缩小设备的占用空间, 简化设备结构; (4)本发明在扶手和椅面之间不仅设置有辅助站立推杆还设置有伸缩杆,两者相 互配合,在辅助站立推杆旋转的情况下,能够保证扶手始终保持水平状态,同时,扶手本身 还具有伸缩装置用于调整扶手的长,因此,无论设备处于哪种形式均能利用扶手对使用者 提供有效的辅助支撑; (5)本发明还设置有智能控制系统,利用智能导航模块自行建模并根据需求针对 性的设置关键位置点,利用语音识别模块或控制面板操作设备移动到相应的关键位置点或 根据需要变换姿态,操作简便,能够轻松满足学习能力降低的老年人的使用需求。 附图说明 为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所 需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施 例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图 获得其他的附图。 图1为助老起居设备的整体结构简图; 图2为底盘的结构示意图; 图3为躺、坐转换过程的机构运动简图; 图4为立、坐转换过程的机构运动简图; 图5为控制系统的组成示意图; 图6为立、坐、躺转换过程的控制动作框图; 其中,1、底盘;2、后轮;3、前轮;4、椅面;5、扶手;6、靠背;7、第一连杆;8、第二连杆; 9、第二旋转装置;10、辅助站立推杆;11、第三连杆;12、伸缩杆;13、第一旋转装置;14、升降 装置。 6 CN 111568657 A 说 明 书 4/6 页











