
技术摘要:
本发明公开了一种移动式堆取料机用任意方向移动智能转向装置及控制方法,该装置包括能够在竖直方向上移动的车轮,且每个车轮都能够单独在竖直方向上移动,从而使得各个车轮都先上升后、再旋转、最后降落承力,最终使得所有车轮都通过这样的方式完成转向,再向前驱动车 全部
背景技术:
堆取料机是比较常见的、应用于众多领域的重型输送设备,但是现有技术中的堆 取料机上仍然存在较多缺点,需要进一步改进; 所述堆取料机一般用于矿场、仓库、码头、煤场等有大型货物需要运输与储藏的场 所,并用于抓取运输散装的大型货物,如砂石、煤炭、甚至粮食、塑料颗粒等等;该堆取料机 也可以分成多种,如通过轨道进行移动的轨道式堆取料机,如通过轮胎进行移动的移动式 堆取料机等等;对于其中的移动式堆取料机来说,其在工作的过程中,需要在情况比较复杂 的堆料现场中往复移动,期间必然进行无数次的转弯操作,目前已有的移动式重型机械在 执行转弯操作时,都是各个轮胎原地旋转,在旋转过程中,轮胎与地面的摩擦极大,不仅仅 会加速轮胎的磨损,还会对地面造成永久的损伤,特别是当移动式堆取料机进入到堆料现 场中以后,对于堆料地面及待堆放的物料都会造成较为严重的破坏。 另外,堆取料机是重型机械,相对来说是比较笨重,对于现有的堆取料机来说,其 转向的转动幅度一般都不能太大,并且要低速、缓慢地进行转向操作;而且有些情况下,施 工现场没办法提供足够大的场地空间供堆取料机进行转向操作,为了提高堆取料机的工作 效率,需要设计出一种新的转向装置及相应的控制方法。 由于上述原因,本发明人对现有的移动式堆取料机做了深入研究,以期待设计出 一种能够解决上述问题的移动式堆取料机用任意方向移动智能转向装置及控制方法。
技术实现要素:
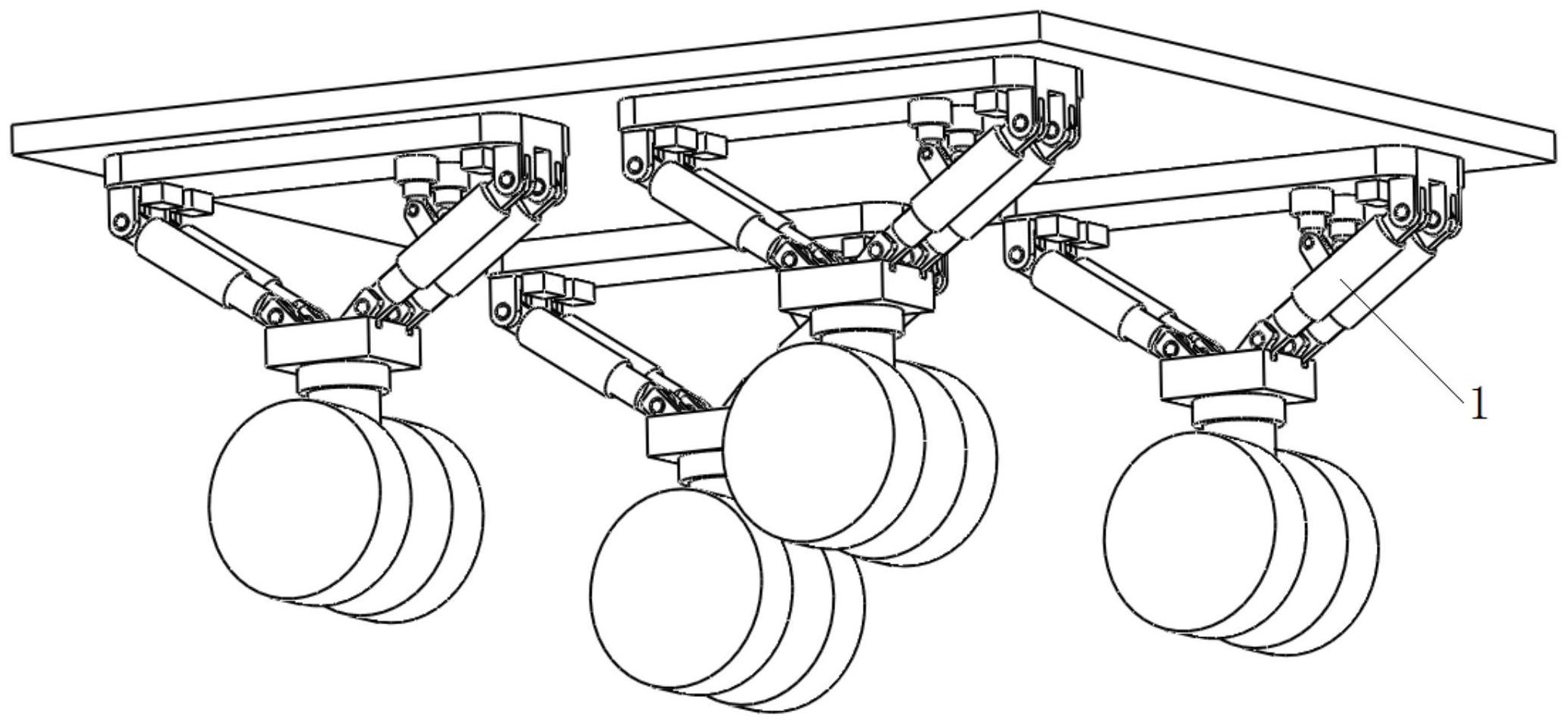
为了克服上述问题,本发明人进行了锐意研究,设计出一种移动式堆取料机用任 意方向移动智能转向装置及控制方法,该装置包括能够在竖直方向上移动的车轮,且每个 车轮都能够单独在竖直方向上移动,从而使得各个车轮都先上升后、再旋转、最后降落承 力,最终使得所有车轮都通过这样的方式完成转向,再向前驱动车轮,该堆取料机的行进方 向即发生改变,完成了原地转向操作,从而完成本发明。 具体来说,本发明的目的在于提供移动式堆取料机用任意方向移动智能转向装 置,该装置包括设置在其下方的驱动轮单元1, 所述驱动轮单元1能够控制其上的车轮2在竖直方向上往复移动。 其中,所述驱动轮单元1包括两个并行设置的车轮2,所述两个车轮2通过横轴3相 连。 其中,所述驱动轮单元1还包括位于车轮2上方的升降平台4, 其中,在所述升降平台4与横轴3之间设置有旋转柱塞5,通过旋转柱塞5承载重力 并控制横轴及车轮2转向。 4 CN 111606068 A 说 明 书 2/6 页 其中,在所述升降平台4上方设置有液压杆,通过液压杆承载重力并控制车轮2在 竖直方向上往复移动; 优选地,在所述升降平台4山还安装有压力传感器,通过压力传感器实时感应旋转 柱塞5和车轮2上的压力值。 其中,在所述升降平台4上方设置有安装平台7; 在所述升降平台4与安装平台7之间设置有前液压杆61和后液压杆62, 所述前液压杆61的两端分别与升降平台4和安装平台7铰接, 所述后液压杆62的两端分别与升降平台4和安装平台7铰接。 优选地,所述安装平台7固定安装在堆取料机的底部。 其中,在所述安装平台7和前液压杆61之间还设置有上液压杆63, 所述上液压杆63一端固定在安装平台7的底面上,另一端与前液压杆61铰接。 其中,所述上液压杆63与前液压杆61同步伸缩工作。 本发明还提供一种移动式堆取料机用任意方向移动智能转向控制方法,该方法包 括如下步骤: 步骤1,控制所有驱动轮单元1中的车轮2同时停止旋转前进; 步骤2,逐一控制各个驱动轮单元1中的车轮2转向, 步骤3,待全部车轮2转向完毕后,控制所有车轮2旋转前进。 其中,所述驱动轮单元1设置有至少两列,且每列包括至少2个驱动轮单元1, 在每列驱动轮单元1中,位于前面的驱动轮单元称之为前驱动轮单元, 在每列驱动轮单元1中,位于后面的驱动轮单元称之为后驱动轮单元; 优选地,在步骤2中,先控制前驱动轮单元中的车轮2转向,再控制后驱动轮单元中 的车轮2转向; 更优选地,在执行所述步骤2前,控制后驱动轮单元中的车轮2向前移动。 其中,在步骤2中,控制所述车轮2转向包括如下子步骤: 子步骤a,通过控制前液压杆61、后液压杆62和上液压杆63收缩来带动升降平台4 及车轮2向上移动,使得车轮2与地面脱离接触,; 子步骤b,通过旋转柱塞5控制横轴3及车轮2转向; 子步骤c,通过控制前液压杆61、后液压杆62和上液压杆63伸长来带动升降平台4 及车轮2向下移动,使得车轮2与地面接触; 优选地,在执行子步骤c时,对于前驱动轮单元,控制前液压杆5的长度大于后液压 杆6的长度,使得车轮向后偏移; 进一步优选地,在子步骤a中,通过压力传感器确定车轮2与地面脱离接触。 本发明所具有的有益效果包括: 根据本发明提供的移动式堆取料机用任意方向移动智能转向装置及控制方法能 够提高动式堆取料机的转向效率,降低在转弯过程中对地面及轮胎的损伤,该装置及方法 能够实现堆取料机原地转向移动,对于转向场地要求较低,另外,还能够确保转向过程中整 体受力平稳,避免重心偏移失稳等险情出现。 5 CN 111606068 A 说 明 书 3/6 页 附图说明 图1示出根据本发明一种优选实施方式的移动式堆取料机用任意方向移动智能转 向装置整体结构示意图; 图2示出根据本发明一种优选实施方式的移动式堆取料机用任意方向移动智能转 向装置中驱动轮单元结构示意图; 图3示出根据本发明一种优选实施方式的移动式堆取料机用任意方向移动智能转 向装置中安装平台结构示意图; 图4示出根据本发明一种优选实施方式的移动式堆取料机用任意方向移动智能转 向装置中升降平台结构示意图; 图5示出根据本发明一种优选实施方式的移动式堆取料机用任意方向移动智能转 向装置中车轮结构示意图; 图6示出根据本发明一种优选实施方式的移动式堆取料机用任意方向移动智能转 向控制方法的流程图。 附图标号说明: 1-驱动轮单元 2-车轮 3-横轴 4-升降平台 41-铰接座 5-旋转柱塞 61-前液压杆 611-铰接片 612-销钉 62-后液压杆 63-上液压杆 7-安装平台 71-液压箱 8-驱动机构 9-外部套筒











