
技术摘要:
本发明公开一种机器人自主定位充电桩的方法、系统和计算机存储介质,充电桩上的左右两侧分别安装360度的红外发射源,机器人安装两个红外接收器,红外接收器的表面包裹有偏振片和不透光材料,且两个偏振片的偏振角度正交,计算得到机器人充电时与充电桩之间的运动目标值 全部
背景技术:
现代智能移动机器人普遍具备自动充电功能,当机器人完成任务或者剩余电量低 于预设电量阈值时,就会自动移动至配套的充电桩进行充电。当机器人由于定位偏差导致 无法充电时,会造成机器人电池过度放电而无法工作,所以对充电桩位置精准定位对于智 能移动机器人非常重要。 现有充电桩定位方法主要有1.红外定位方法,误差较大,2.激光雷达测距定位方 法,硬件成本较高,算法复杂,3.摄像头 二维码定位方法,误差较大,二维码需要维护。
技术实现要素:
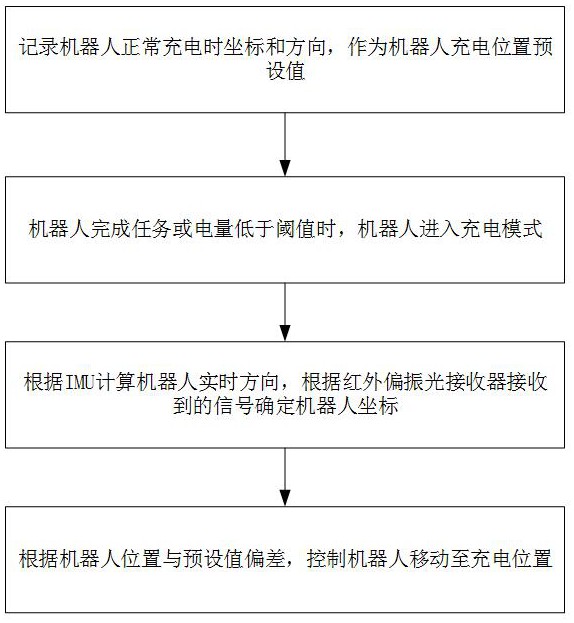
发明目的:本发明的目的在于解决现有技术中存在的不足,提供一种机器人自主 定位充电桩的方法、系统和计算机存储介质。 技术方案:本发明的一种机器人自主定位充电桩的方法,包括以下步骤: 1)、充电桩上的左右两侧分别安装360度的红外发射源,红外发射源的表面均包裹有偏 振片,偏振片的偏振角度为 ,机器人设有匀速旋转的电机,电机上安装有第一红外接收器 和第二红外接收器,两个红外接收器在同一竖直方向上一上一下贴紧设置,且红外接收器 不被遮挡,电机的角速度为 ,第一红外接收器和第二红外接收器的表面从里向外依次包 裹有偏振片和不透光材料,不透光材料上预设有对应宽度的竖直缝隙,机器人内部设有惯 性测量单元IMU;第一红外接收器上的偏振片的偏振角度为 ,第二红外接收器的偏振片的 偏振角度为 ; 其中,不透光材料以及相互正交偏振片的设置,能够避免环境中其他光源和热源对信 号的干扰; 2)、以充电桩上的两个红外发射源中点为坐标原点O(0,0),建立笛卡尔坐标系XOY;两 个红外发射源坐标分别为 和 ,d为A、B与原点o的距离,手动控制机器 人移动至充电桩位置,此时通过第一红外接收器和第二红外接收器的信号对比,当第一红 外接收器接收到强信号,而第二红外接收器接收到极弱信号时,说明该位置接收到红外偏 振光信号,然后记录第二红外接收器坐标C分别与两个红外发射源的坐标A以及B所构成的 夹角分别为 和 ,IMU测量角度 ,计算出此时第一红外接收器的坐标 , 机器人的坐标 则根据第一红外接收器在机器人上的安装位置和角度 确 定,并以 和 作为机器人需要自动充电时运动的目标值;关系式如下: 4 CN 111596260 A 说 明 书 2/5 页 式中, 为第一红外接收器与机器人中心在机器人坐标系X’DY’下Y’方向差值, 为第一红外接收器与机器人中心在X’DY’坐标下X’方向差值; 上述过程中,由于两个红外接收器位置无限贴近相对重合。整个过程属于标定过程,先 手动控制机器人到充电桩的位置,并且对接好;后续当机器人再需要自行充电时,就可以按 照这个位置移动。 3)、当机器人完成任务或电量低于阈值时,则进入自动充电模式,在一定时间内随 机移动,寻找充电桩的红外偏振信号;随机移动的过程能够保证机器人能够同时接收到两 个红外发射源的信号,一旦满足上述条件(当第一红外接收器接收到强信号,而第二红外接 收器接收到极弱信号时)就不在随机移动,而是有方向地移动。 4)、计算机器人实时坐标,计算机器人坐标偏差和角度偏差; 通过第一红外接收器接收红外偏振光的角度 、 以及IMU预测出的机器人角度 ,计算出机器人的实时坐标 和第一红外接收器实时坐标 ; 计算坐标偏差 和方向偏差 ; 5 CN 111596260 A 说 明 书 3/5 页 5)、机器人根据坐标偏差和方向偏差自动移动,重复步骤(4)和步骤(5),直到偏差消 失。 由于现在大多数红外接收器产品都是45°接收,直接使用将严重影响a1和a2角度 测量,所以需要对接收角度进行控制。为将接收角度控制在0.1°以内,提高测量精度,不透 光材料上竖直缝隙宽度为w,不透光材料的材料厚度为b,材料厚度b与缝隙宽度w的关系满 足 。 本发明还公开一种机器人自主定位充电桩的系统,包括充电桩和机器人,充电桩 上的左右两侧分别安装360度的红外发射源,红外发射源的表面均包裹有偏振片,偏振片的 偏振角度为 ,机器人设有匀速旋转的电机,电机上安装有第一红外接收器和第二红外接 收器,两个红外接收器一上一下靠近设置,两个红外接收器的高度与红外发射源的高度相 同,且红外接收器不被遮挡;所述第一红外接收器和第二红外接收器的表面从里向外依次 包裹有偏振片和不透光材料,第一红外接收器上的偏振片的偏振角度为 ,第二红外接收 器上的偏振片的偏振角度为 ,不透光材料上预设有宽度为w的竖直缝隙;电 机的角速度为 ;机器人内部设有惯性测量单元IMU和运动控制器,运动控制器根据机器 人的实时坐标偏差和方向偏差来控制机器人自动移动;其中,不透光材料的材料厚度为b, 材料厚度b与缝隙宽度w的关系满足 。 有益效果:本发明基于IMU准确角度测量和偏振光三角定位方法,确定移动机器人 与充电桩相对位置,通过采用两个角度正交的红外接收器,防止环境中热源和其他光源干 扰,保证红外信号的稳定性和抗干扰性,进而实现机器人精准自动充电。相比于传统红外方 式定位充电桩,精度更高;相比于使用激光雷达与摄像机加二维码定位方法,成本更低,且 计算量小。 附图说明 图1为本发明的整体工作流程示意图; 图2为实施例机器人与充电桩之间的坐标示意图; 图3为实施例中机器人偏差量自动移动原理示意图。











