
技术摘要:
本发明提供了一种确定物体相位值的方法、装置、存储介质及电子装置,其中,该方法包括:获取通过对目标物体进行拍摄所得到的目标图像;确定目标图像中第一区域的第一质量值,以及,基于第一质量值确定目标图像中第二区域的第二质量值,其中,第一区域为与目标图像边界 全部
背景技术:
随着投影和成像技术的发展,光学三维重建技术已成为物体三维模型重建的重要 手段。因其精度高、测速快、无需接触等优点,光学三维重建方法在导航控制规划、工业检 测、遗产保护等领域具有较高的应用价值。 在相关技术中,采用相位测量轮廓术(Phase Measuring Profilometry,简称PMP) 通过结合正弦光栅投影技术和相移技术,实现对物体表面信息的三维重建。主要思想为:正 弦投影光栅经编码后投影到物体的表面,经物体的表面反射变形,再通过相移技术,即通过 质量图引导解缠,获得物体表面的相位分布,最后通过三角几何法获取物体表面的轮廓信 息。在计算质量值时,整个图像的质量值计算方法相同,然而,在图像的边界处,图像的边界 一侧并未存在或者存在较少的像素点,因此,导致得到的质量图不准确。不仅如此,在解缠 时,每次均在该邻接队列中寻找质量最高的点进行解缠,导致在原有质量图解相位的过程 中,质量图解相位的时间较长,较难满足实验的要求,尤其随着邻接队列的增长,其对于邻 接高质量点的遍历时间很长,将极大增加寻找高质量点的时间。 由此可知,相关技术中存在计算质量图不准确,解缠时间长的问题。 针对相关技术中存在的上述问题,目前尚未提出有效的解决方案。
技术实现要素:
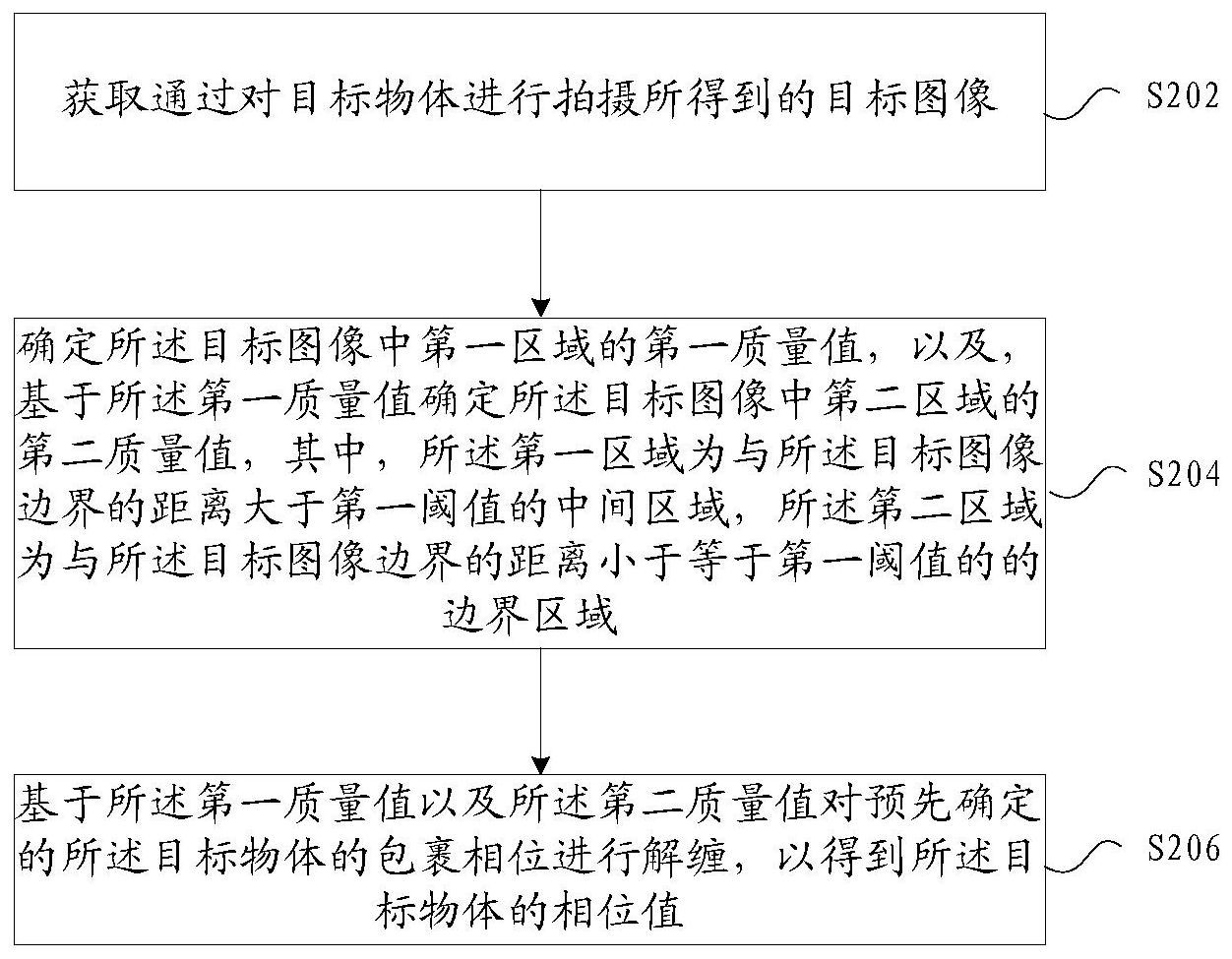
本发明实施例提供了一种确定物体相位值的方法、装置、存储介质及电子装置,以 至少解决相关技术中存在的计算质量图不准确,解缠时间长的问题。 根据本发明的一个实施例,提供了一种确定物体相位值的方法,包括:获取通过对 目标物体进行拍摄所得到的目标图像;确定所述目标图像中第一区域的第一质量值,以及, 基于所述第一质量值确定所述目标图像中第二区域的第二质量值,其中,所述第一区域为 与所述目标图像边界的距离大于第一阈值的中间区域,所述第二区域为与所述目标图像边 界的距离小于等于第一阈值的边界区域;基于所述第一质量值以及所述第二质量值对预先 确定的所述目标物体的包裹相位进行解缠,以得到所述目标物体的相位值。 根据本发明的另一个实施例,提供了一种确定物体相位值的装置,包括:获取模 块,用于获取通过对目标物体进行拍摄所得到的目标图像;确定模块,用于确定所述目标图 像中第一区域的第一质量值,以及,基于所述第一质量值确定所述目标图像中第二区域的 第二质量值,其中,所述第一区域为与所述目标图像边界的距离大于第一阈值的中间区域, 所述第二区域为与所述目标图像边界的距离小于等于第一阈值的边界区域;解缠模块,用 于基于所述第一质量值以及所述第二质量值对预先确定的所述目标物体的包裹相位进行 解缠,以得到所述目标物体的相位值。 4 CN 111595267 A 说 明 书 2/10 页 根据本发明的又一个实施例,还提供了一种计算机可读存储介质,所述计算机可 读存储介质中存储有计算机程序,其中,所述计算机程序被设置为运行时执行上述任一项 方法实施例中的步骤。 根据本发明的又一个实施例,还提供了一种电子装置,包括存储器和处理器,所述 存储器中存储有计算机程序,所述处理器被设置为运行所述计算机程序以执行上述任一项 方法实施例中的步骤。 通过本发明,获取目标物体的目标图像,确定目标图像第一区域的第一质量值,根 据第一质量值确定目标图像第二区域的第二质量值,得到目标图像的质量图,根据质量图 对目标物体的包裹相位进行解缠,得到目标物体的相位值,由于是基于目标图像中与所述 目标图像边界的距离大于第一阈值的中间区域的质量值来确定与所述目标图像边界的距 离小于等于第一阈值的边界区域的质量值,由此实现了准确地确定各区域的质量值的目 的,此外,在进行解缠处理时,是由质量图引导解缠,因此,可以解决相关技术中存在的计算 质量图不准确,解缠时间长的问题,进而得到了准确的质量图,并且缩短了解缠时间,提高 了确定物体相位值的效率。 附图说明 此处所说明的附图用来提供对本发明的进一步理解,构成本申请的一部分,本发 明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中: 图1是本发明实施例的一种确定物体相位值的方法的移动终端的硬件结构框图; 图2是根据本发明实施例的确定物体相位值的方法的流程图; 图3是根据本发明可选实施例的第二区域质量函数处理示意图; 图4是根据本发明实施例的三维重建模型整体结构图; 图5是根据本发明实施例的确定物体相位值的装置的结构框图。











