
技术摘要:
本发明公开了一种移动机器人以及移动机器人系统,它包括:移动机器人,该移动机器人包括收放装置、线缆、电池和识别装置,所述收放装置用于回收和放出线缆,所述电池用于为移动机器人供电,所述识别装置用于识别电桩,所述线缆上设有接头,该接头上设有接触电极;电桩 全部
背景技术:
移动机器人因为需要长时间在空间中移动,所以需要持续的电量供给,而且具有 特定功能的机器人需要的电量更多,例如清洁类的移动机器人,想要有较好的清洁效果,需 要较大的吸力来提供较强的灰尘吸取能力,而真空电机的功率就要很大,需要的电量更多。 目前是在机器人中内置较大容量的电池或通过线缆采用外部供电来解决移动机器人的电 量供给问题,采用内置较大容量的电池的方法虽然不影响机器人的行动,但是机器人的续 航能力较差,电池的充电时间较长。采用线缆外部供电的方法虽然续航能力强,不需要给电 池充电,但是在移动过程中,机器人的线缆容易缠绕在一起或与其它物体缠绕,需要人工来 解决,浪费时间和人力成本。
技术实现要素:
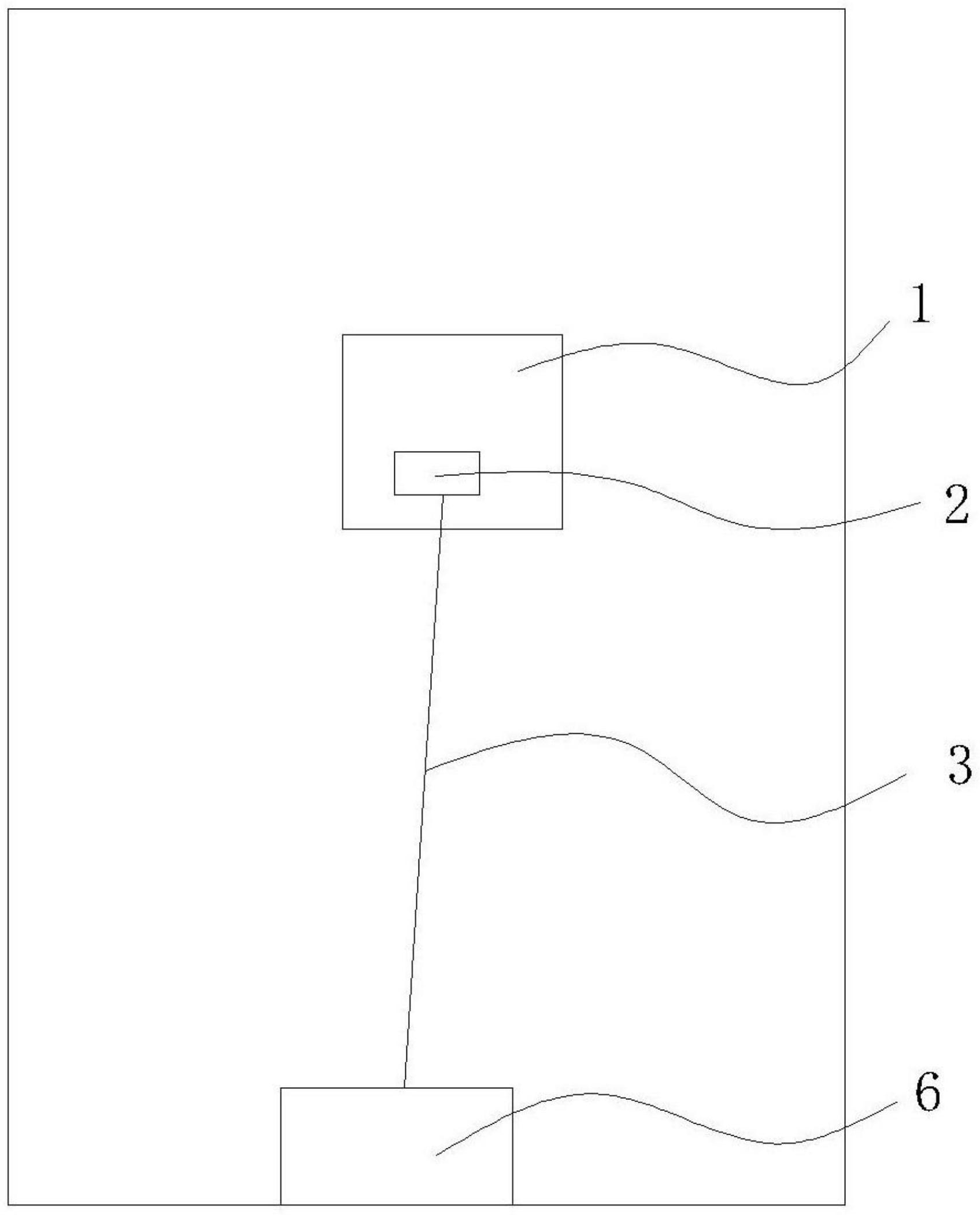
为解决上述问题,本发明提供了一种移动机器人,大大提高了移动机器人的工作 时间。本发明的具体技术方案如下: 一种移动机器人的,它包括:移动机器人,该移动机器人包括收放装置、线缆、电池和识 别装置,所述收放装置用于回收和放出线缆,所述电池用于为移动机器人供电,所述识别装 置用于识别电桩,所述线缆上设有接头,该接头上设有接触电极。 于本发明的一个或多个方案中,所述收放装置包括绞盘和电机,所述电机用于带 动绞盘进行回收和放出线缆。 于本发明的一个或多个方案中,所述移动机器人上设有用于检测线缆拉力的拉力 传感器,所述收放装置根据拉力传感器的检测数据进行回收和放出线缆。 于本发明的一个或多个方案中,所述识别装置为激光雷达或摄像头。 采用本发明提供的技术方案,移动机器人具有回收线缆的功能,防止线缆过长缠 绕在一起;移动机器人通过拉力传感器实时检测线缆受到的拉力,根据拉力数值进行放出 线缆,放置线缆被拉断 一种移动机器人系统,它包括移动机器人和电桩,所述移动机器人如权利要求1至4所 述,所述电桩上设有用于安放所述接触电极的插孔和用于锁定所述接头的锁定构件,该插 孔设有与外部电流连接的充电极片,所述移动机器人工作时通过线缆与电桩进行连接以获 取电能。 于本发明的一个或多个方案中,所述移动机器人上设有信息发送装置,所述电桩 上设有信息接收模块,所述移动机器人通过信息发送装置发送信息给电桩使电桩控制锁定 构件松开接头。 于本发明的一个或多个方案中,所述锁定构件为门锁式结构,该锁定构件上设有 3 CN 111555402 A 说 明 书 2/4 页 锁芯,所述接头上设有与所述锁芯相匹配的凹槽。 于本发明的一个或多个方案中,所述电桩上设有红外检测装置,该红外检测装置 用于检测接触电极是否位于插孔中。 于本发明的一个或多个方案中所述电桩上设有用于发出引导信号的信号发射模 块。 于本发明的一个或多个方案中,所述引导信号至少包括红外调制信号、超声波或 图像识别信号中任意一种。 采用本发明提供的技术方案,移动机器人工作时通过线缆与电桩进行连接以获取 外部电能,解决了移动机器人续航能力差的问题;移动机器人的接头可以根据移动机器人 的工作情况与电桩进行连接或脱离,大大提高了移动机器人的灵活性,防止线缆与其它物 件缠绕,降低了人力成本。 附图说明 图1为本发明的移动机器人与电桩的结构示意图; 图2为本发明的收放装置与电桩的结构示意图。











