
技术摘要:
本发明公开了一种用于智能垃圾分类的塑料垃圾桶,包括外箱和底架,所述外箱的顶部设置有盖板,外箱的内部底面上固定设置有底架,底架的顶部一端设置有底座,底座的顶部设置有放料口,垃圾从滑轨落到两个滚筒上后,小块垃圾在两个滚筒上滚到落下,落到两个方口滑筒的内 全部
背景技术:
垃圾分类一般是指按一定规定或标准将垃圾分类储存、分类投放和分类搬运,从 而转变成公共资源的一系列活动的总称。 现有的垃圾分类设备,无法实现体积不同垃圾的分类工作,在垃圾分类设备的使 用过程中,无法实现滑轨的高度调节工作,不便于将放料口中的垃圾过渡到筛选板上;现有 的垃圾分类设备,垃圾在进行分类过程中,存在垃圾推挤在分类工具上,无法使得垃圾在分 类工具上发生翻滚,垃圾易出现聚集包裹现象,使得分类不彻底;现有的垃圾分类设备,无 法对不同体积大块垃圾和小块垃圾进行分离,大块垃圾与小块垃圾推挤在一起后处理困 难,且垃圾处理时,大块垃圾占用空间大,圆口滑筒下方的收集箱易收集满需要经常处理, 仅设置一个箱盖时,箱盖打开不便,使用不方便。 公开号为CN110733776A的中国专利,公开了一种人工智能辅助垃圾分类系统。该 系统包括控制器;以及与控制器相连接的语音接收器和提示器。采用上述设计,垃圾投放者 咨询辅助分类系统时,都是针对手头具体的、实际的某种垃圾进行询问,使用的是能被人工 智能辅助分类系统识别的自然语言;而得到答案后,合适的投放口就在眼前,可以立即实 施;整个过程中没有空洞抽象的理论,也不需要用户刻意去记忆什么,因而分类投放准确, 用户感觉轻松,所以可操作性极强。同时,经过日积月累,使用本系统的用户,能够自然地被 动吸收相应的垃圾分类知识,能让垃圾分类投放更容易普及,因而带动整个社会垃圾分类、 回收、处理事业的发展。本发明还公开了一种使用该系统的分类垃圾桶。该专利与本发明相 比,存在现有的垃圾分类设备,垃圾在进行分类过程中,存在垃圾推挤在分类工具上,无法 使得垃圾在分类工具上发生翻滚,垃圾易出现聚集包裹现象,使得分类不彻底和无法对不 同体积大块垃圾和小块垃圾进行分离,大块垃圾与小块垃圾推挤在一起后处理困难,且垃 圾处理时,大块垃圾占用空间大,圆口滑筒下方的收集箱易收集满需要经常处理,仅设置一 个箱盖时,箱盖打开不便,使用不方便的问题。
技术实现要素:
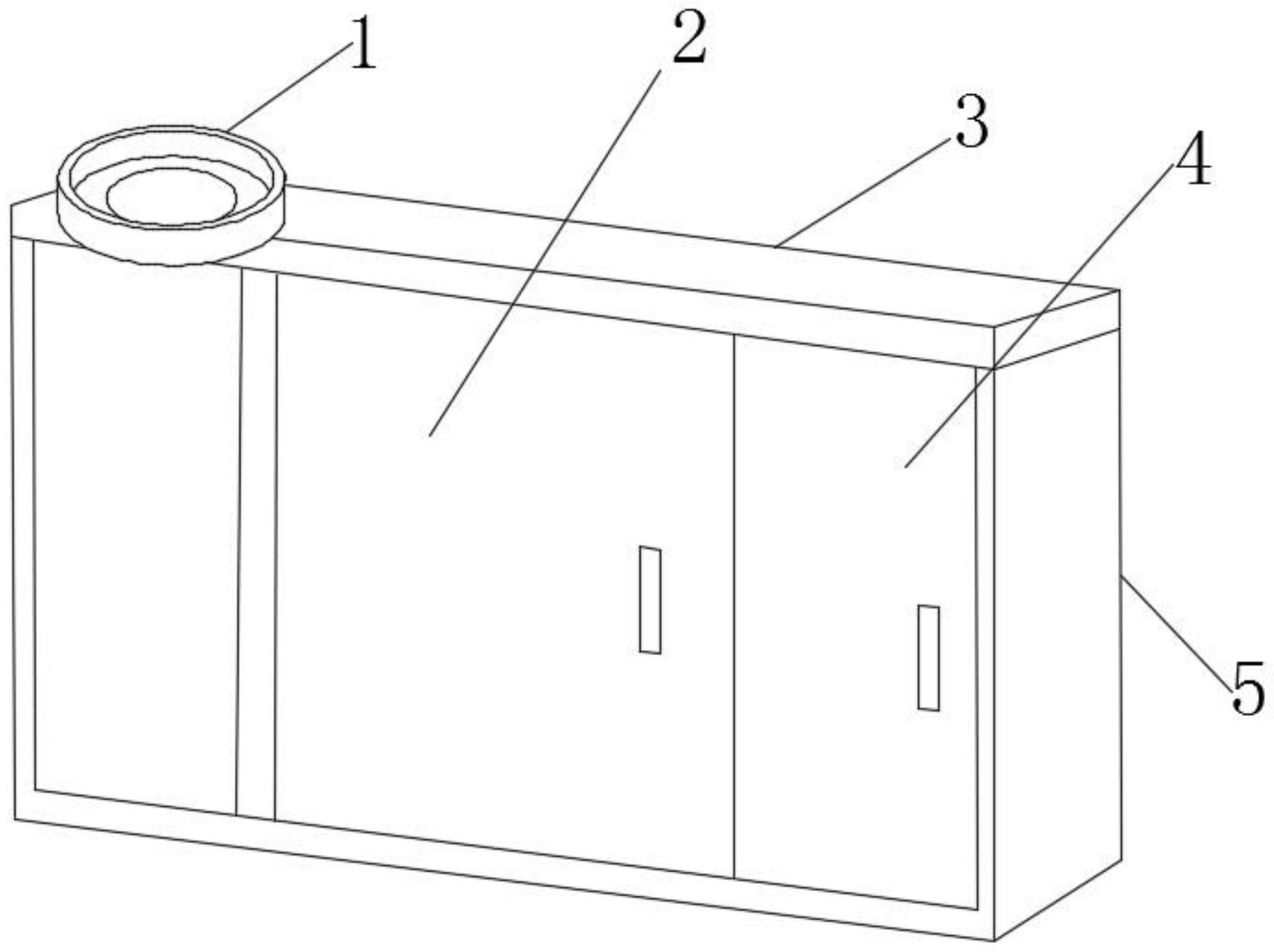
本发明的目的在于提供一种用于智能垃圾分类的塑料垃圾桶以及使用方法,以解 决现有的垃圾分类设备,无法实现体积不同垃圾的分类工作,在垃圾分类设备的使用过程 中,无法实现滑轨的高度调节工作,不便于将放料口中的垃圾过渡到筛选板上;现有的垃圾 分类设备,垃圾在进行分类过程中,存在垃圾推挤在分类工具上,无法使得垃圾在分类工具 上发生翻滚,垃圾易出现聚集包裹现象,使得分类不彻底;现有的垃圾分类设备,无法对不 同体积大块垃圾和小块垃圾进行分离,大块垃圾与小块垃圾推挤在一起后处理困难,且垃 圾处理时,大块垃圾占用空间大,圆口滑筒下方的收集箱易收集满需要经常处理,仅设置一 4 CN 111605918 A 说 明 书 2/8 页 个箱盖时,箱盖打开不便,使用不方便的问题。 本发明的目的可以通过以下技术方案实现: 一种用于智能垃圾分类的塑料垃圾桶,包括外箱和底架,所述外箱的顶部设置有 盖板,外箱的内部底面上固定设置有底架,底架的顶部一端设置有底座,底座的顶部设置有 放料口,底座一侧的底架的顶面上设置有两个第一支撑板,每个第一支撑板上均设置有第 一转板,两个第一转板之间设置有第一夹板,第一夹板的内部设置有第一滑块,两个第一滑 块一侧的侧壁上分别设置有第一螺杆,每个第一螺杆的一端分别穿过第一转板的侧壁伸出 到第一转板的外侧,且每个第一螺杆与第一转板的连接处均设置有第一转盘,第一转盘与 第一螺杆通过螺纹连接,底架的顶面一端固定设置有两个第二支撑板,每个第二支撑板上 均设置有第二转板,两个第二转板的一侧分别设置有转杆,两个第二转板分别通过转杆与 两个第二支撑板转动连接,两个第二转板之间设置有第二夹板,第二夹板的内部设置有第 二滑块; 所述第二夹板的一端固定设置有固定板,固定板一侧的侧壁上设置有电机,固定 板另一侧的侧壁上设置有主动轮,电机的输出端穿过固定板与主动轮传动连接,远离固定 板一侧的第二滑块的侧壁上设置有第二螺杆,第二螺杆的一端穿过第二支撑板伸出到第二 支撑板的外侧,第二螺杆与第二支撑板的连接处设置有第二转盘,第二转盘与第二螺杆通 过螺纹连接,位于同一侧的第一滑块和第二滑块之间分别设置有转轴,两个转轴上分别设 置有滚筒,两个转轴的一端分别穿过两个第二滑块,且穿过第二滑块的转轴的端面上固定 设置有传动轮,两个传动轮与主动轮之间通过皮带连接,第一夹板和第二夹板之间的顶面 上设置有两个立板,两个立板的一端顶部位置设置滑轨,滑轨的顶端与放料口的内部连通, 且滑轨位于放料口的下方,滑轨的底端设置有四个直角板,四个直角板对称设置在两个立 板上,底架的内部底面上设置有三个矩形板,每个矩形板均设置有收集箱作为本发明进一 步的方案:每个第一转板的底端侧壁上均固定设置有螺纹杆,两个第一支撑板上的侧壁上 均开设有滑槽,两个螺纹杆分别穿过两个滑槽的内部,且每个螺纹杆的一端均通过螺纹连 接有调节旋钮,转动两个第一转板,使得第一转板发生转动,对滑轨的倾斜角度进行调节, 需要提升滑轨的高度时,抬高两个第一转板,使得螺纹杆沿滑槽向上移动,再转动调节旋 钮,通过螺纹杆将第一转板的位置固定,实现滑轨的高度调节工作,便于将放料口中的垃圾 过渡到筛选板上,实现体积不同垃圾的分类工作。 作为本发明进一步的方案:所述第一夹板两侧内壁上分别开设有卡槽,与卡槽对 应位置的两个第一滑块的侧壁上分别设置有转柱,转柱设置在卡槽的内部,能够限制两个 第一滑块在第一夹板内部滑动时的方向,避免第一滑块发生偏移。 作为本发明进一步的方案:两个第一转板上均开设有通孔,每个通孔的内部分别 设置有第一转盘,第一转盘与第一转板转动连接,转动两个第一转盘,由于第一转盘与第一 螺杆通过螺纹连接,使得两个第一螺杆分别拉动两个第一滑块在第一夹板的内部滑动,实 现对两个滚筒之间的距离调节工作。 作为本发明进一步的方案:两个第二滑块的顶面和底面上分别转柱,与转柱对应 位置的第二夹板的内壁上分别设置有卡槽,第二螺杆与第二滑块之间活动连接,使得第二 滑块能够在卡槽的内部滑动,在两个滚筒之间的距离改变时,第二滑块能够发生轻微转动, 便于调节两个滚筒的间距。 5 CN 111605918 A 说 明 书 3/8 页 作为本发明进一步的方案:两个立板的顶部均设置由筛选板,两个筛选板的底端 分别位于两个滚筒的一侧,每个筛选板的顶端均设置有若干通孔,通过螺顶能够将筛选板 固定到立板上,对两个滚筒之间的垃圾进行阻挡,避免垃圾从两个滚筒上脱落。 作为本发明进一步的方案:所述第一夹板和第二夹板之间的底面上固定设置有两 个连接板,两个连接板的底部设置有两个方口滑筒,两个连接板的一端设置有圆口滑筒,三 个滑筒首尾相接,使得滚筒上的垃圾均能落到滑筒的内部,避免垃圾从其他位置泄漏。 作为本发明进一步的方案:三个收集箱分别设置在三个滑筒的下方,每个收集箱 两侧的矩形板上均设置有卡板,每个收集箱的侧壁上分别设置有拉手,圆口滑筒一侧的外 箱的侧壁上设置有第二箱盖,第二箱盖一侧的外箱的侧壁上设置有第一箱盖,垃圾从滑轨 落到两个滚筒上后,小块垃圾在两个滚筒上滚到落下,落到两个方口滑筒的内部,在从方口 滑筒落到收集箱中,由于两个滚筒之间的距离逐渐增大,大块垃圾在两个滚筒的偏下方位 置落下,经过圆口滑筒落到最边上的收集箱中,通过打开第一箱盖和第二箱盖,将收集箱取 出进行处理,同时由于垃圾处理时,大块垃圾占用空间大,圆口滑筒下方的收集箱易收集满 需要经常处理,打开第二箱盖便可将该收集箱取出,不需要将全部的箱盖都打开,使用方 便,操作简单。 一种用于智能垃圾分类的塑料垃圾桶的使用方法,该使用方法具体包括以下步 骤: 步骤一:将垃圾投放到放料口中,每个第一转板的底端侧壁上均固定设置有螺纹 杆,两个第一支撑板上的侧壁上均开设有滑槽,两个螺纹杆分别穿过两个滑槽的内部,且每 个螺纹杆的一端均通过螺纹连接有调节旋钮,转动两个第一转板,使得第一转板发生转动, 对滑轨的倾斜角度进行调节,需要调节滑轨的高度时,抬高两个第一转板,使得螺纹杆沿滑 槽向上移动,再转动调节旋钮,通过螺纹杆将第一转板的位置固定,实现滑轨的高度调节工 作,便于将放料口中的垃圾过渡到筛选板上,实现体积不同垃圾的分类工作; 步骤二:垃圾从放料口进入滑轨上,转动第二转盘,使得第二螺杆发生转动,使得 第二滑块在卡槽的内部滑动,再转动转动两个第一转盘,由于第一转盘与第一螺杆通过螺 纹连接,使得两个第一螺杆分别拉动两个第一滑块在第一夹板的内部滑动,实现对两个滚 筒之间的距离调节工作,第一夹板两侧内壁上分别开设有卡槽,与卡槽对应位置的两个第 一滑块的侧壁上分别设置有转柱,转柱设置在卡槽的内部,在两个滚筒之间的距离改变时, 第二滑块发生轻微转动,通过电机的输出端驱动主动轮转动,主动轮通过皮带驱动两个传 动轮转动,继而使得两个滚筒发生转动,使得垃圾在两个滚筒之间发生翻滚,将垃圾进行分 离; 步骤三:垃圾从滑轨落到两个滚筒上后,小块垃圾在两个滚筒上滚到落下,落到两 个方口滑筒的内部,在从方口滑筒落到收集箱中,由于两个滚筒之间的距离逐渐增大,大块 垃圾在两个滚筒的偏下方位置落下,经过圆口滑筒落到最边上的收集箱中,通过打开第一 箱盖和第二箱盖,将收集箱取出进行处理。 本发明的有益效果: 1、本发明中,每个第一转板的底端侧壁上均固定设置有螺纹杆,两个第一支撑板 上的侧壁上均开设有滑槽,两个螺纹杆分别穿过两个滑槽的内部,且每个螺纹杆的一端均 通过螺纹连接有调节旋钮,转动两个第一转板,使得第一转板发生转动,对滑轨的倾斜角度 6 CN 111605918 A 说 明 书 4/8 页 进行调节,需要调节滑轨的高度时,抬高两个第一转板,使得螺纹杆沿滑槽向上移动,再转 动调节旋钮,通过螺纹杆将第一转板的位置固定,实现滑轨的高度调节工作,便于将放料口 中的垃圾过渡到筛选板上,实现体积不同垃圾的分类工作; 2、本发明中,转动第二转盘,使得第二螺杆发生转动,使得第二滑块在卡槽的内部 滑动,再转动转动两个第一转盘,由于第一转盘与第一螺杆通过螺纹连接,使得两个第一螺 杆分别拉动两个第一滑块在第一夹板的内部滑动,实现对两个滚筒之间的距离调节工作, 第一夹板两侧内壁上分别开设有卡槽,与卡槽对应位置的两个第一滑块的侧壁上分别设置 有转柱,转柱设置在卡槽的内部,在两个滚筒之间的距离改变时,第二滑块发生轻微转动, 便于调节两个滚筒的间距,通过电机的输出端驱动主动轮转动,主动轮通过皮带驱动两个 传动轮转动,继而使得两个滚筒发生转动,使得垃圾在两个滚筒之间发生翻滚,将垃圾进行 分离,避免聚集包裹现象,使得分类更加彻底; 3、本发明中,垃圾从滑轨落到两个滚筒上后,小块垃圾在两个滚筒上滚到落下,落 到两个方口滑筒的内部,在从方口滑筒落到收集箱中,由于两个滚筒之间的距离逐渐增大, 大块垃圾在两个滚筒的偏下方位置落下,经过圆口滑筒落到最边上的收集箱中,通过打开 第一箱盖和第二箱盖,将收集箱取出进行处理,同时由于垃圾处理时,大块垃圾占用空间 大,圆口滑筒下方的收集箱易收集满需要经常处理,打开第二箱盖便可将该收集箱取出,使 用方便,操作简单。 附图说明 为了便于本领域技术人员理解,下面结合附图对本发明作进一步的说明。 图1为本发明一种用于智能垃圾分类的塑料垃圾桶的整体结构示意图; 图2为本发明中外箱的内部结构示意图; 图3为本发明中筛选板的结构示意图; 图4为本发明中第一转板的结构示意图; 图5为本发明中第二夹板的结构示意图; 图6为本发明图5中A区的局部放大图; 图中:1、放料口;2、第一箱盖;3、盖板;4、第二箱盖;5、外箱;6、滚筒;7、底架;8、第 一支撑板;9、底座;10、第一转板;11、第一转盘;12、滑轨;13、直角板;14、立板;15、第一夹 板;16、方口滑筒;17、筛选板;18、电机;19、固定板;20、主动轮;21、第二转板;22、第二支撑 板;23、圆口滑筒;24、矩形板;25、卡板;26、拉手;27、收集箱;28、第二夹板;29、调节旋钮; 30、第一螺杆;31、第一滑块;32、第二螺杆;33、传动轮;34、转轴;35、第二滑块。











