
技术摘要:
本申请公开了一种无人机控制方法、装置、电子设备、服务器及存储介质,属于无人机技术领域。该方法包括:获取无人机在目标时间片的预测位置数据,预测位置数据包括第一全球定位位置数据,还包括第一无线定位位置数据和第一基站位置数据中的至少一种;将预测位置数据发 全部
背景技术:
随着无人机技术的飞速发展,无人机变得越来越常见。如果无人机在禁飞区域飞 行的话,会对国家和个人的财产和安全造成非常大的威胁。因此,亟需一种无人机控制方法 来对无人机进行控制,从而防止无人机在禁飞区域飞行。 相关技术中,无人机中安装和运行有电子设备,电子设备基于其中安装和运行的 全球定位系统(Global Positioning System,GPS)获取无人机的位置信息,将该位置信息 发送至服务器。服务器接收该位置信息,基于该位置信息确定无人机的飞行区域。服务器预 先下载禁飞区域数据,根据无人机的飞行区域判断该飞行区域中是否存在禁飞区域。如果 存在禁飞区域,则向电子设备发送禁飞消息。电子设备基于该禁飞消息对无人机进行禁飞 操作,从而可以防止无人机在禁飞区域飞行。 然而,上述无人机控制方法中获取的无人机的位置信息是基于GPS而获取的,当 GPS受到干扰时,会导致无人机的位置信息获取不够准确,从而影响对无人机的控制。
技术实现要素:
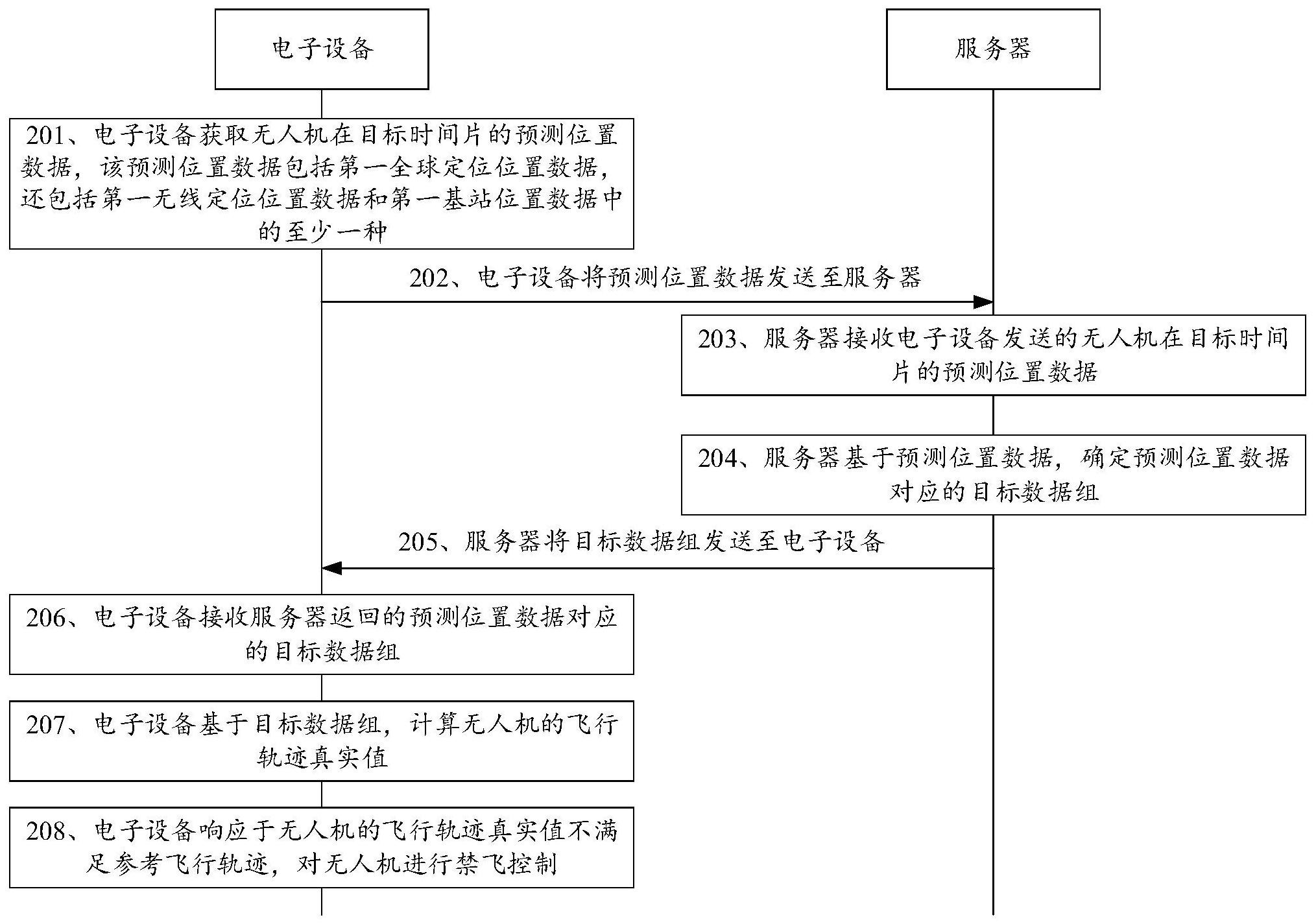
本申请实施例提供了一种无人机控制方法、装置、电子设备、服务器及存储介质, 可用于解决相关技术中的问题。该技术方案如下: 第一方面,本申请实施例提供了一种无人机控制方法,应用于电子设备,该电子设 备与服务器通过网络进行通信连接,该方法包括: 获取该无人机在目标时间片的预测位置数据,该预测位置数据包括第一全球定位 位置数据,还包括第一无线定位位置数据和第一基站位置数据中的至少一种; 将该预测位置数据发送至该服务器; 接收该服务器返回的该预测位置数据对应的目标数据组; 基于该目标数据组,计算该无人机的飞行轨迹真实值; 响应于该无人机的飞行轨迹真实值不满足参考飞行轨迹,对该无人机进行禁飞控 制。 在一种可能的实现方式中,该基于该目标数据组,计算该无人机的飞行轨迹真实 值,包括: 基于该目标数据组,确定该无人机在目标时间片的位置质量分数,位置质量分数 用于表示无人机在目标时间片的预测位置数据的准确度; 根据该位置质量分数,计算该无人机的飞行轨迹真实值。 在一种可能的实现方式中,该基于该目标数据组,确定该无人机在目标时间片的 位置质量分数,包括: 5 CN 111596685 A 说 明 书 2/16 页 对该目标数据组进行解析,得到该目标数据组中包括的该无人机在目标时间片的 实际位置数据和该预测位置数据对应的无线定位密度和无线定位方差; 基于该无人机在目标时间片的实际位置数据和预测位置数据,计算该无人机在目 标时间片的位置距离; 基于该无人机在目标时间片的位置距离和该预测位置数据对应的无线定位密度 和无线定位方差,计算该无人机在目标时间片的位置质量分数。 在一种可能的实现方式中,该基于该无人机在目标时间片的位置距离和该预测位 置数据对应的无线定位密度和无线定位方差,计算该无人机在目标时间片的位置质量分 数,包括: 基于该无人机在目标时间片的位置距离和该预测位置数据对应的无线定位密度 和无线定位方差,按照下述公式计算该无人机在目标时间片的位置质量分数scorei: 其中,该Distancei为第i个时间片的位置距离,该acci为第i个时间片的实际位置 数据的精度,该WIFI Numberi为第i个时间片的预测位置数据对应的WIFI扫描数目,该WNi为 第i个时间片的预测位置数据对应的无线定位密度,该WDi为第i个时间片的预测位置数据 对应的无线定位方差。 在一种可能的实现方式中,该根据该位置质量分数,计算该无人机的飞行轨迹真 实值,包括: 根据该位置质量分数,按照下述公式计算该无人机的飞行轨迹真实值 traceWeight: 其中,该N为位置质量分数的个数,该scorei为第i个时间片的位置质量分数。 在一种可能的实现方式中,该获取该无人机在目标时间片的预测位置数据之前, 该方法还包括: 获取该无人机的起始位置数据,该起始位置数据包括第二全球定位位置数据,还 包括第二无线定位位置数据和第二基站位置数据中的至少一种; 将该无人机的起始位置数据发送至该服务器; 接收该服务器基于该起始位置数据返回的指示信息,该指示信息用于指示该无人 机向该服务器发送该无人机的预测位置数据。 第二方面,本申请实施例提供了一种无人机控制方法,应用于服务器,该服务器和 电子设备通过网络进行通信连接,该方法包括: 接收该电子设备发送的无人机在目标时间片的预测位置数据,该预测位置数据包 括第一全球定位位置数据,还包括第一无线定位位置数据和第一基站位置数据中的至少一 种; 基于该预测位置数据,确定该预测位置数据对应的目标数据组; 6 CN 111596685 A 说 明 书 3/16 页 将该目标数据组发送至该电子设备,由该电子设备基于该目标数据组对该无人机 进行禁飞控制。 在一种可能的实现方式中,该基于该预测位置数据,确定该预测位置数据对应的 目标数据组,包括: 基于该第一无线定位位置数据和第一基站位置数据中的至少一种,确定该预测位 置数据对应的实际位置数据; 基于该第一全球定位位置数据,确定该无人机的预测位置数据对应的无线定位密 度和无线定位方差; 将该预测位置数据对应的实际位置数据,以及该预测位置数据对应的无线定位密 度和无线定位方差作为目标数据组。 在一种可能的实现方式中,该方法还包括: 接收该电子设备发送的起始位置数据,该起始位置数据包括第二全球定位位置数 据,还包括第二无线定位位置数据和第二基站位置数据中的至少一种; 获取该无人机的飞行范围; 响应于该无人机的起始位置数据合法且该无人机的飞行范围存在禁飞区域,向该 电子设备发送指示信息,该指示信息用于指示该电子设备向该服务器发送该无人机的预测 位置数据。 第三方面,本申请实施例提供了一种无人机控制装置,该装置包括: 获取模块,用于获取该无人机在目标时间片的预测位置数据,该预测位置数据包 括第一全球定位位置数据,还包括第一无线定位位置数据和第一基站位置数据中的至少一 种; 发送模块,用于将该预测位置数据发送至该服务器; 接收模块,用于接收该服务器返回的该预测位置数据对应的目标数据组; 计算模块,用于基于该目标数据组,计算该无人机的飞行轨迹真实值; 控制模块,用于响应于该无人机的飞行轨迹真实值不满足参考飞行轨迹,对该无 人机进行禁飞控制。 在一种可能的实现方式中,该计算模块,用于基于该目标数据组,确定该无人机在 目标时间片的位置质量分数,位置质量分数用于表示无人机在目标时间片的预测位置数据 的准确度; 根据该位置质量分数,计算该无人机的飞行轨迹真实值。 在一种可能的实现方式中,该计算模块,用于对该目标数据组进行解析,得到该目 标数据组中包括的该无人机在目标时间片的实际位置数据和该预测位置数据对应的无线 定位密度和无线定位方差; 基于该无人机在目标时间片的实际位置数据和预测位置数据,计算该无人机在目 标时间片的位置距离; 基于该无人机在目标时间片的位置距离和该预测位置数据对应的无线定位密度 和无线定位方差,计算该无人机在目标时间片的位置质量分数。 在一种可能的实现方式中,该计算模块,用于基于该无人机在目标时间片的位置 距离和该预测位置数据对应的无线定位密度和无线定位方差,按照下述公式计算该无人机 7 CN 111596685 A 说 明 书 4/16 页 在目标时间片的位置质量分数scorei: 其中,该Distancei为第i个时间片的位置距离,该acci为第i个时间片的实际位置 数据的精度,该WIFI Numberi为第i个时间片的预测位置数据对应的WIFI扫描数目,该WNi为 第i个时间片的预测位置数据对应的无线定位密度,该WDi为第i个时间片的预测位置数据 对应的无线定位方差。 在一种可能的实现方式中,该计算模块,用于根据该位置质量分数,按照下述公式 计算该无人机的飞行轨迹真实值traceWeight: 其中,该N为位置质量分数的个数,该scorei为第i个时间片的位置质量分数。 在一种可能的实现方式中,该获取模块,还用于获取该无人机的起始位置数据,该 起始位置数据包括第二全球定位位置数据,还包括第二无线定位位置数据和第二基站位置 数据中的至少一种; 该发送模块,还用于将该无人机的起始位置数据发送至该服务器; 该接收模块,还用于接收该服务器基于该起始位置数据返回的指示信息,该指示 信息用于指示该无人机向该服务器发送该无人机的预测位置数据。 第四方面,本申请实施例提供了一种无人机控制装置,该装置包括: 接收模块,用于接收该电子设备发送的无人机在目标时间片的预测位置数据,该 预测位置数据包括第一全球定位位置数据,还包括第一无线定位位置数据和第一基站位置 数据中的至少一种; 确定模块,用于基于该预测位置数据,确定该预测位置数据对应的目标数据组; 发送模块,用于将该目标数据组发送至该电子设备,由该电子设备基于该目标数 据组对该无人机进行禁飞控制。 在一种可能的实现方式中,该确定模块,用于基于该第一无线定位位置数据和第 一基站位置数据中的至少一种,确定该预测位置数据对应的实际位置数据; 基于该第一全球定位位置数据,确定该无人机的预测位置数据对应的无线定位密 度和无线定位方差; 将该预测位置数据对应的实际位置数据,以及该预测位置数据对应的无线定位密 度和无线定位方差作为目标数据组。 在一种可能的实现方式中,该接收模块,还用于接收该电子设备发送的起始位置 数据,该起始位置数据包括第二全球定位位置数据,还包括第二无线定位位置数据和第二 基站位置数据中的至少一种; 该装置还包括: 获取模块,用于获取该无人机的飞行范围; 该发送模块,还用于响应于该无人机的起始位置数据合法且该无人机的飞行范围 8 CN 111596685 A 说 明 书 5/16 页 存在禁飞区域,向该电子设备发送指示信息,该指示信息用于指示该电子设备向该服务器 发送该无人机的预测位置数据。 第五方面,提供了一种电子设备,该电子设备包括处理器和存储器,该存储器中存 储有至少一条程序代码,该至少一条程序代码由处理器加载并执行,以实现上述第一方面 和第一方面的任一种实现方式提供的无人机控制方法。 第六方面,提供了一种服务器,该服务器包括处理器和存储器,该存储器中存储有 至少一条程序代码,该至少一条程序代码由该处理器加载并执行,以实现上述第二方面和 第二方面的任一种实现方式提供的无人机控制方法。 第七方面,还提供了一种计算机可读存储介质,该计算机可读存储介质中存储有 至少一条程序代码,该至少一条程序代码由处理器加载并执行,以实现上述任一无人机控 制方法。 本申请实施例提供的技术方案至少带来如下有益效果: 本申请实施例提供的技术方案获取到的目标时间片的预测位置数据不仅包括第 一全球定位位置数据,还包括第一无线定位位置数据和第一基站位置数据中的至少一种, 因此可以使得无人机的预测位置数据的确定更加准确,从而可以使得确定的目标数据组更 加准确。基于目标数据组计算无人机的飞行轨迹真实值,增加了无人机的飞行轨迹的造假 难度,一定程度上可以使得无人机的控制过程更加准确。 附图说明 为了更清楚地说明本申请实施例中的技术方案,下面将对实施例描述中所需要使 用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本申请的一些实施例,对于 本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他 的附图。 图1是本申请实施例提供的一种无人机控制方法的实施环境示意图; 图2是本申请实施例提供的一种无人机控制方法的流程图; 图3是本申请实施例提供的一种无人机控制方法的流程图; 图4是本申请实施例提供的一种无人机控制装置的结构示意图; 图5是本申请实施例提供的一种无人机控制装置的结构示意图; 图6是本申请实施例提供的一种电子设备的结构示意图; 图7是本申请实施例提供的一种服务器的结构示意图。











