
技术摘要:
一种车辆的控制装置,包括电子控制装置,该电子控制装置构成为,进行自动驾驶控制,在所述自动驾驶控制的执行中,判定在基于所述自动驾驶控制的今后的行驶中是否存在发动机的起动控制和自动变速器的变速控制重叠地执行的可能性,当判定为在基于所述自动驾驶控制的今后 全部
背景技术:
公知有具备发动机、作为行驶用的动力源发挥功能的旋转机械、以及构成所述旋 转机械与驱动轮之间的动力传递路径的一部分的自动变速器的车辆的控制装置。例如,日 本特开2012-51564所记载的车辆用发动机旋转控制装置便是如此。在该日本特开2012- 51564中公开了如下内容:在判断为自动变速器的变速控制以及发动机的起动控制重叠地 执行的情况下,优先执行在变速控制以及起动控制中的先进行了执行判断的一方的控制, 在该一方的控制的执行结束后开始另一方的控制的执行,由此降低冲击。
技术实现要素:
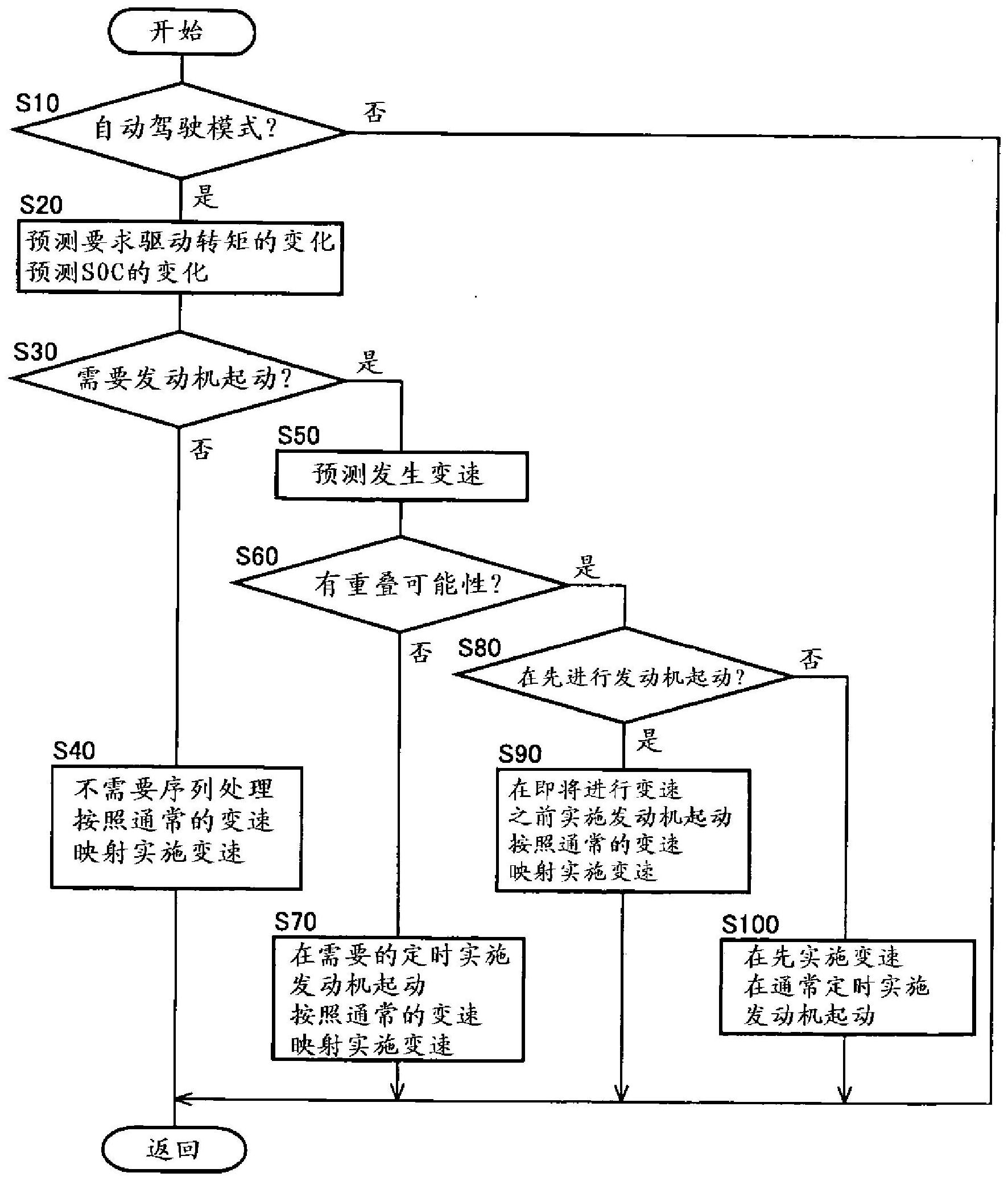
在此,还公知有进行通过基于设定的目标行驶状态自动地进行加减速和转向而行 驶的自动驾驶控制。希望在基于自动驾驶控制的行驶中也不重叠地执行自动变速器的变速 控制和发动机的起动控制。此外,在所述那样的日本特开2012-51564所公开的控制中,若不 是在发生了变速控制和起动控制实际重叠那样的状况之后,则无法进行依次执行变速控制 和起动控制的控制。因此,针对变速控制和起动控制的执行重叠的期间,必然会延迟执行某 一方的控制。即,在发生了变速控制和起动控制实际重叠那样的状况之后,仅能够通过延迟 执行某一方的控制,而依次执行变速控制和起动控制。由于变速控制和起动控制以不重叠 的方式执行,因此,若仅能够一律延迟某一方的控制,则有可能在例如需要增大驱动转矩的 情况下,加速响应性恶化。 本发明是以以上的情况为背景而完成的,提供一种车辆的控制装置,其能够避免 在基于自动驾驶控制的行驶中,针对发动机的起动控制和自动变速器的变速控制的执行实 际重叠的期间,一律延迟执行某一方的控制。 本发明的一个方式是车辆的控制装置,所述车辆具备:发动机;作为行驶用的动力 源发挥功能的旋转机械;以及构成所述旋转机械与驱动轮之间的动力传递路径的一部分的 自动变速器,所述控制装置的特征在于,所述控制装置具备电子控制装置,该电子控制装置 构成为:设定目标行驶状态,进行通过基于所述目标行驶状态自动地进行加减速和转向而 行驶的自动驾驶控制,在所述自动驾驶控制的执行中,判定在基于所述自动驾驶控制的今 后的行驶中是否存在所述发动机的起动控制和所述自动变速器的变速控制重叠地执行的 可能性,当判定为在基于所述自动驾驶控制的今后的行驶中存在所述发动机的起动控制和 所述自动变速器的变速控制重叠地执行的可能性的情况下,在所述今后的行驶中先执行所 述发动机的起动控制和所述自动变速器的变速控制中的一方的控制,在所述一方的控制结 束之后执行另一方的控制。 根据所述结构,当判定为在基于自动驾驶控制的今后的行驶中存在发动机的起动 控制和自动变速器的变速控制重叠地执行的可能性的情况下,在今后的行驶中先执行起动 3 CN 111547034 A 说 明 书 2/19 页 控制和变速控制中的一方的控制,在该一方的控制结束之后再执行另一方的控制。因此,能 够进行依次执行起动控制和变速控制的控制,而不会发生在基于自动驾驶控制的行驶中起 动控制和变速控制实际重叠那样的状况。因此,能够避免在基于自动驾驶控制的行驶中,针 对发动机的起动控制和自动变速器的变速控制的执行实际重叠的期间,一律延迟执行某一 方的控制。 在所述方式的车辆的控制装置中,所述电子控制装置也可以构成为,执行所述发 动机的起动控制,以便在判定为存在所述发动机的起动控制和所述自动变速器的变速控制 重叠地执行的可能性的情况下,在开始执行所述自动变速器的变速控制的时间点之前结束 所述发动机的起动控制。 根据所述结构,执行该起动控制,以便在判定为存在发动机的起动控制和自动变 速器的变速控制重叠地执行的可能性的情况下,在开始执行变速控制的时间点之前结束起 动控制。因此,能够抑制因起动控制和变速控制重叠地执行而导致的冲击。另外,在需要增 大驱动转矩的情况下,通过提前起动发动机而提高加速响应性。 在所述方式的车辆的控制装置中,所述电子控制装置也可以构成为,在判定为存 在所述发动机的起动控制和所述自动变速器的变速控制重叠地执行的可能性的情况下,在 所述自动变速器的变速控制结束之后执行所述发动机的起动控制。 根据所述结构,在判定为存在发动机的起动控制和自动变速器的变速控制重叠地 执行的可能性的情况下,在变速控制结束后执行起动控制。因此,能够抑制因起动控制和变 速控制重叠地执行而引起的冲击。另外,在未要求增大驱动转矩的情况下,通过延迟发动机 的起动而提高燃耗经济性。 在所述方式的车辆的控制装置中,所述电子控制装置也可以构成为,执行所述自 动变速器的变速控制,以便在判定为存在所述发动机的起动控制和所述自动变速器的变速 控制重叠地执行的可能性的情况下,在开始执行所述发动机的起动控制的时间点之前结束 所述自动变速器的变速控制。 根据所述结构,执行该变速控制,以便在判定为存在发动机的起动控制和自动变 速器的变速控制重叠地执行的可能性的情况下,在开始执行起动控制的时间点之前结束变 速控制。因此,能够抑制因起动控制和变速控制重叠地执行而引起的冲击。另外,在需要增 大驱动转矩的情况下,通过例如提前执行降挡而提高加速响应性。 在所述方式的车辆的控制装置中,所述电子控制装置也可以构成为,在判定为在 基于所述自动驾驶控制的今后的行驶中存在所述发动机的起动控制和所述自动变速器的 变速控制重叠地执行的可能性的情况下,变更判定为存在所述发动机的起动控制和所述自 动变速器的变速控制重叠地执行的可能性的情况下的所述自动驾驶控制的所述目标行驶 状态。 根据所述结构,在判定为在基于自动驾驶控制的今后的行驶中存在发动机的起动 控制和自动变速器的变速控制重叠地执行的情况下,变更判定为存在发动机的起动控制和 自动变速器的变速控制重叠地执行的可能性的情况下的自动驾驶控制的目标行驶状态。因 此,在今后的行驶中能够先执行起动控制和变速控制中的一方的控制。由此,能够抑制因起 动控制和变速控制重叠地执行而引起的冲击。另外,在需要增大驱动转矩的情况下,提高加 速响应性。 4 CN 111547034 A 说 明 书 3/19 页 在所述方式的车辆的控制装置中,所述电子控制装置也可以构成为,通过变更判 定为存在所述发动机的起动控制和所述自动变速器的变速控制重叠地执行的可能性的情 况下的驱动要求量的变化方式,来变更所述自动驾驶控制的所述目标行驶状态。 根据所述结构,通过变更判定为存在发动机的起动控制和所述自动变速器的变速 控制重叠地执行的可能性的情况下的驱动要求量的变化方式,来变更自动驾驶控制的目标 行驶状态。因此,在今后的行驶中适当地先执行起动控制和变速控制中的一方的控制。 在所述方式的车辆的控制装置中,所述电子控制装置可以构成为,判定能否变更 判定为存在所述发动机的起动控制和所述自动变速器的变速控制重叠地执行的可能性的 情况下的所述自动驾驶控制的所述目标行驶状态,并且,所述电子控制装置也可以构成为, 在判定为能够变更所述自动驾驶控制的所述目标行驶状态的情况下,变更所述自动驾驶控 制的所述目标行驶状态。 根据所述结构,在判定为能够变更自动驾驶控制的目标行驶状态的情况下,变更 自动驾驶控制的目标行驶状态。因此,能够判断能否避免在基于自动驾驶控制的行驶中发 生发动机的起动控制和自动变速器的变速控制实际重叠那样的状况,能够基于该判断结果 适当地进行依次执行起动控制和变速控制的控制。 附图说明 下面参照随附的附图说明本发明示范性的实施例的特征、优点以及技术和工业意 义,其中附图标记表示相应的结构,其中, 图1是说明应用了本发明的车辆的概略结构的图,并且是说明用于车辆中的各种 控制的控制功能以及控制系统的主要部分的图。 图2是说明图1所例示的机械式有级变速部的变速工作与在该变速工作中使用的 卡合装置的工作的组合的关系的工作图表。 图3是表示电气式无级变速部与机械式有级变速部中的各旋转元件的转速的相对 关系的共线图。 图4是表示用于有级变速部的变速控制的变速映射、和用于混合动力行驶与电动 机行驶的切换控制的动力源切换映射的一例的图,也是表示各自的关系的图。 图5是说明相对于AT变速控制在先进行发动机起动控制的情况下的一例的图。 图6是说明用于避免在基于电子控制装置的控制工作的主要部分即自动驾驶控制 的行驶中针对发动机起动控制和AT变速控制的执行实际重叠的期间一律延迟执行某一方 的控制的控制工作的流程图。 图7是执行图6的流程图所示的控制工作的情况下的实施方式的一例。 图8是说明相对于AT变速控制在后进行发动机起动控制的情况下的一例的图。 图9是说明在执行自动驾驶控制中的实施方式即变更目标行驶状态的情况下的一 例的图。 图10是说明在执行自动驾驶控制中变更使车速上升时的变化方式的情况下的一 例的图。 5 CN 111547034 A 说 明 书 4/19 页











