
技术摘要:
本发明公开了一种机器人姿态更新方法及系统,属于机器人技术领域,方法包括:步骤S1采集机器人位移信息;步骤S2处理得到机器人第一坐标位置;步骤S3采集机器人加速度信息;步骤S4处理得到机器人本体的朝向信息;步骤S5处理得到坐标系之间的旋转矩阵;步骤S6采集机器人 全部
背景技术:
机器人是靠自身动力和控制能力来实现各种功能的一种机器,是为了执行不同的 任务而具有可用电脑改变或可编程动作的一种机器,机器人能够为人类带来很多便利之 处,机器人通常由执行机构、驱动装置、检测装置、控制系统和复杂的机械结构组成,其中, 检测装置是用来实时检测机器人的动作及当前工作情况,并根据需要实时反馈给控制系 统,控制系统通过与预先设定的信息进行比较后,发出相应的执行命令对执行机构进行调 整,以保证机器人的动作符合预定的要求。 作为检测装置的传感器大致可以分为两类:一类是内部信息传感器,用于检测机 器人各部分的内部状况,如各关节的位置、速度、加速度等,并将所测得的信息作为反馈信 号送至控制器,形成闭环控制。一类是外部信息传感器,用于获取有关机器人的作业对象及 外界环境等方面的信息,以使机器人的动作能适应外界情况的变化,使之达到更高层次的 自动化,甚至使机器人具有某种“感觉”,向智能化发展,例如视觉、声觉等外部传感器给出 工作对象、工作环境的有关信息,利用这些信息构成一个大的反馈回路,从而将大大提高机 器人的工作精度,机器人通过检测装置实时感知自身当前所处的姿态,并根据后续反馈的 信号对自身状态进行实时的更新,现有技术中机器人感知自身状态算法过于复杂,使得处 理器的运算负荷过大,计算时间过长,实时性效果不佳。
技术实现要素:
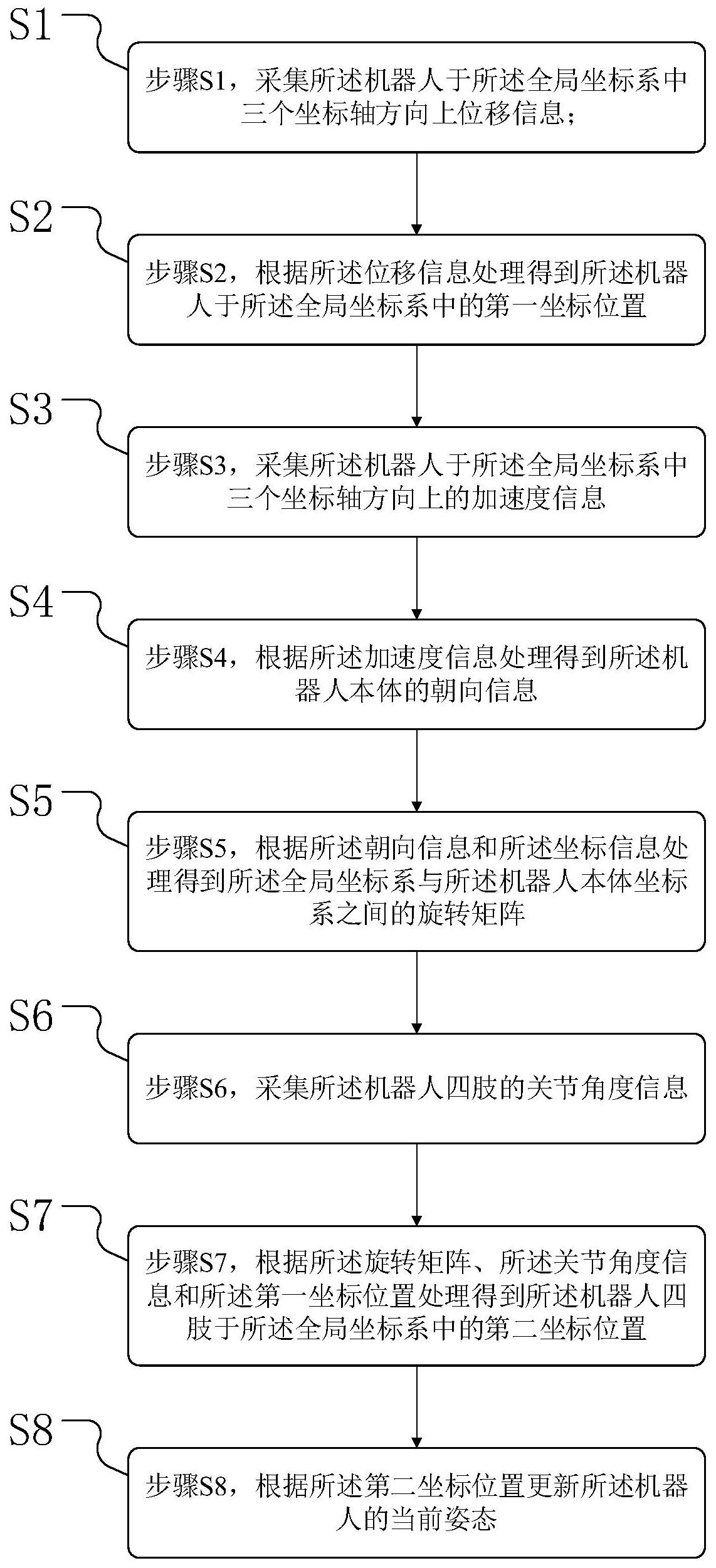
根据现有技术中存在的上述问题,现提供一种机器人姿态更新方法及系统,简化 了机器人对自身状态的计算过程,降低了处理器运算负荷的同时减少了计算时间,提高了 机器人姿态更新的实时性。 一种机器人姿态更新方法,其中,所述机器人呈人形结构,所述机器人预先构建一 全局坐标系和一机器人本体坐标系,所述姿态估计方法具体包括: 步骤S1,采集所述机器人于所述全局坐标系中三个坐标轴方向上位移信息; 步骤S2,根据所述位移信息处理得到所述机器人于所述全局坐标系中的第一坐标 位置; 步骤S3,采集所述机器人于所述全局坐标系中三个坐标轴方向上的加速度信息; 步骤S4,根据所述加速度信息处理得到所述机器人本体的朝向信息; 步骤S5,根据所述朝向信息和所述坐标信息处理得到所述全局坐标系与所述机器 人本体坐标系之间的旋转矩阵; 步骤S6,采集所述机器人四肢的关节角度信息; 步骤S7,根据所述旋转矩阵、所述关节角度信息和所述第一坐标位置处理得到所 述机器人四肢于所述全局坐标系中的第二坐标位置; 4 CN 111590572 A 说 明 书 2/5 页 步骤S8,根据所述第二坐标位置更新所述机器人的当前姿态。 优选地,其中,所述加速度信息为所述机器人躯干的加速度信息。 优选地,其中,所述朝向信息包括所述机器人躯干的航向角、翻滚角和俯仰角。 优选地,其中,所述全局坐标系为所述机器人启动时刻的地理坐标系。 优选地,其中,所述机器人本体坐标系为以所述机器人的质心为原点建立的坐标 系。 一种机器人姿态更新系统,其中,所述机器人呈人形结构,所述机器人预先构建一 全局坐标系和一机器人本体坐标系,所述姿态估计系统具体包括: 第一采集模块,用于采集所述机器人于所述全局坐标系中三个坐标轴方向上位移 信息; 第一处理模块,连接所述第一采集模块,用于根据所述位移信息处理得到所述机 器人于所述全局坐标系中的第一坐标位置; 第二采集模块,用于采集所述机器人于所述全局坐标系中三个坐标轴方向上的加 速度信息; 第二处理模块,连接所述第二采集模块,用于根据所述加速度信息处理得到所述 机器人本体的朝向信息; 矩阵生成模块,连接所述第一处理模块和所述第二处理模块,用于根据所述朝向 信息和所述坐标信息处理得到所述全局坐标系与所述机器人本体坐标系之间的旋转矩阵; 第三采集模块,用于采集所述机器人四肢的关节角度信息; 坐标生成模块,连接所述矩阵生成模块、所述第三采集模块和所述第一处理模块, 用于根据所述旋转矩阵、所述关节角度信息和所述第一坐标位置处理得到所述机器人四肢 于所述全局坐标系中的第二坐标位置; 更新模块,连接所述坐标生成模块,用于根据所述第二坐标位置更新所述机器人 的当前姿态。 优选地,其中,所述加速度信息为所述机器人躯干的加速度信息。 优选地,其中,所述朝向信息包括所述机器人躯干的航向角、翻滚角和俯仰角。 优选地,其中,所述全局坐标系为所述机器人启动时刻的地理坐标系。 优选地,其中,所述机器人本体坐标系为以所述机器人的质心为原点建立的坐标 系。 上述技术方案的有益效果在于: 提供一种机器人姿态更新方法及系统,简化了机器人对自身状态的计算过程,降 低了处理器运算负荷的同时减少了计算时间,提高了机器人姿态更新的实时性。 附图说明 图1是本发明的较佳实施例中,一种机器人姿态更新方法的流程图; 图2是本发明的较佳实施例中,一种机器人姿态更新系统的结构示意图。











