
技术摘要:
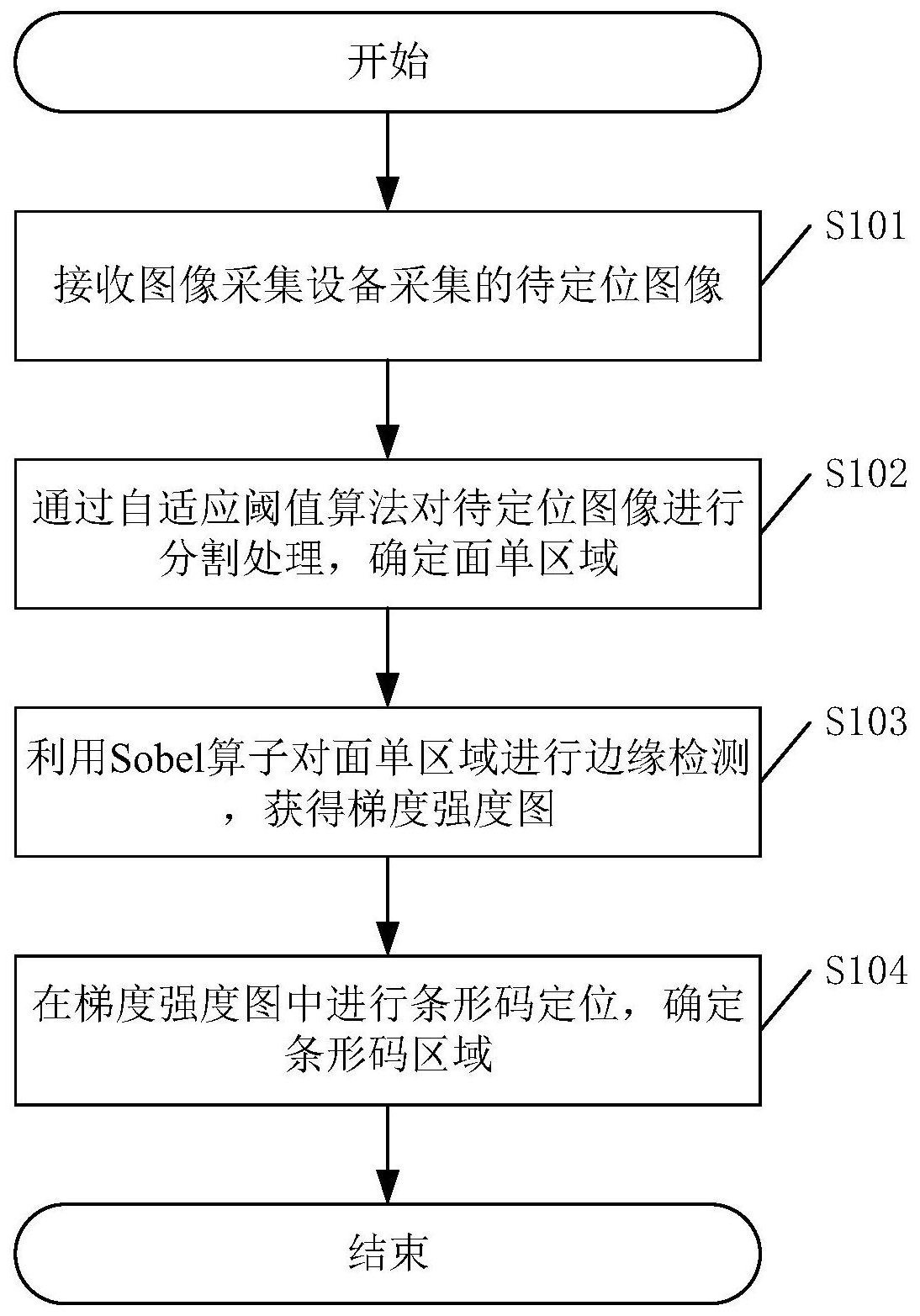
本申请公开了一种条形码定位方法,包括接收图像采集设备采集的待定位图像;通过自适应阈值算法对所述待定位图像进行分割处理,确定面单区域;利用Sobel算子对所述面单区域进行边缘检测,获得梯度强度图;在所述梯度强度图中进行条形码定位,确定条形码区域;该条形码定 全部
背景技术:
随着信息技术的发展,条形码技术已广泛应用于自动化管理的各个领域,具有准 确快速、方便经济的特点,给各行业的事务管理带来了极大便利。 条形码是用以表达一组信息的图形标识符,具体可标出物品的生产国、制造厂商、 商品名称、生产日期、图书分类号、邮件起始地点、类别、日期等信息。当通过专业的识别设 备对其进行识别检测时,即可获得各类相关信息,而在条形码检测过程中,条形码的定位成 为最基础且最重要的环节。 在现有的条形码定位过程中,首先,利用摄像头获取条形码图像,进一步,通过图 像处理、模式识别等技术对其进行条形码区域的定位,从而实现对条形码区域中条形码的 识别检测。然而,在利用摄像头获取条形码图像时,不可避免的会摄入与条形码无关的背景 部分,如快递单的背景,因此,在条形码定位过程中,很容易受到复杂多变的背景噪声的干 扰,出现条形码定位不准确的问题,从而影响后续条形码的识别检测结果。 因此,如何有效提高条形码定位的准确度,以保证条形码的正常识别是本领域技 术人员亟待解决的问题。
技术实现要素:
本申请的目的是提供一种条形码定位方法,该条形码定位方法可有效提高条形码 定位的准确度,保证了后续条形码的正常识别;本申请的另一目的是提供一种条形码定位 装置、设备以及计算机可读存储介质,也具有上述有益效果。 为解决上述技术问题,本申请提供了一种条形码定位方法,包括: 接收图像采集设备采集的待定位图像; 通过自适应阈值算法对所述待定位图像进行分割处理,确定面单区域; 利用Sobel算子对所述面单区域进行边缘检测,获得梯度强度图; 在所述梯度强度图中进行条形码定位,确定条形码区域。 优选的,所述通过自适应阈值算法对所述待定位图像进行分割处理,确定面单区 域之前,还包括: 对所述待定位图像进行灰度转换,获得灰度图。 优选的,所述通过自适应阈值算法对所述待定位图像进行分割处理,确定面单区 域,包括: 根据预设分割阈值对所述灰度图进行分割,获得第一前景图和第一背景图; 计算所述第一前景图的灰度均值和所述第一背景图的灰度均值; 计算所述第一前景图的灰度均值和所述第一背景图的灰度均值的平均值,获得第 4 CN 111582000 A 说 明 书 2/8 页 一分割阈值; 根据所述第一分割阈值对所述第一前景图进行分割,获得第二前景图和第二背景 图; 计算所述第二前景图的灰度均值和所述第二背景图的灰度均值; 判断所述第二前景图的灰度均值与所述第一前景图的灰度均值是否相等,且所述 第二背景图的灰度均值与所述第一背景图的灰度均值是否相等; 若否,则计算所述第二前景图的灰度均值和所述第一前景图的灰度均值的平均 值,获得第二分割阈值;并根据所述第二分割阈值对所述第二前景图进行分割,直至当前前 景图的灰度均值与上一前景图的灰度均值相等,且当前背景图的灰度均值与上一背景图的 灰度均值相等; 将所述当前前景图作为所述面单区域。 优选的,所述通过自适应阈值算法对所述待定位图像进行分割处理,确定面单区 域之后,还包括: 对所述面单区域进行归一化处理,获得标准面单区域。 优选的,所述利用Sobel算子对所述面单区域进行边缘检测,获得梯度强度图,包 括: 在所述面单区域内建立图像坐标系; 在所述图像坐标系内,按照预设角度间隔建立预设数量个Sobel算子组; 以起始角度Sobel算子组为起点,以终止角度Sobel算子组为终点,依次对所述面 单区域进行边缘检测,获得所述梯度强度图。 优选的,所述在所述梯度图强度中进行条形码定位,确定条形码区域,包括: 对所述梯度强度图进行高斯滤波处理,获得滤波图; 对所述滤波图进行二值化处理,获得二值化图像; 通过形态学操作对所述二值化图像进行膨胀腐蚀和空隙填充,获得形态学图像; 利用最大外接矩形算法在所述形态学图像中确定所述条形码区域。 优选的,所述条形码的定位方法还包括: 通过霍夫变换算法计算所述条形码区域相对于水平方向的第一偏转角; 通过轮廓查找算法计算所述条形码区域相对于水平方向的第二偏转角; 计算所述第一偏转角和所述第二偏转角的均值; 根据所述均值对所述条形码区域进行矫正处理,获得矫正后条形码区域。 为解决上述技术问题,本申请还提供了一种条形码定位装置,包括: 图像获取模块,用于接收图像采集设备采集的待定位图像; 图像分割模块,用于通过自适应阈值算法对所述待定位图像进行分割处理,确定 面单区域; 边缘检测模块,用于利用Sobel算子对所述面单区域进行边缘检测,获得梯度强度 图; 条形码定位模块,用于在所述梯度强度图中进行条形码定位,确定条形码区域。 为解决上述技术问题,本申请还提供了一种条形码定位设备,包括: 存储器,用于存储计算机程序; 5 CN 111582000 A 说 明 书 3/8 页 处理器,用于执行所述计算机程序时实现上述任意一种条形码定位方法的步骤。 为解决上述技术问题,本申请还提供了一种计算机可读存储介质,所述计算机可 读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现上述任意一种条形 码定位方法的步骤。 本申请所提供的一种条形码定位方法,包括接收图像采集设备采集的待定位图 像;通过自适应阈值算法对所述待定位图像进行分割处理,确定面单区域;利用Sobel算子 对所述面单区域进行边缘检测,获得梯度强度图;在所述梯度强度图中进行条形码定位,确 定条形码区域。 可见,本申请所提供的条形码定位方法,在获得待定位图像之后,进行条形码定位 之前,先通过自适应阈值算法对其进行分割处理,获得包括条形码的面单区域,由此,即可 将与条形码无关的背景部分剔除,有效避免其所带来的各种可能性干扰,如突发噪声干扰、 灰度变化复杂度高等的影响,进一步,在基于面单区域进行后续的边缘检测以及定位时,可 大大提升条形码定位结果的准确性,从而保证后续条形码识别过程的正常进行。 本申请所提供的一种条形码定位装置、设备以及计算机可读存储介质,均具有上 述有益效果,在此不再赘述。 附图说明 为了更清楚地说明本申请实施例或现有技术中的技术方案,下面将对实施例或现 有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本 申请的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据 提供的附图获得其他的附图。 图1为本申请所提供的一种条形码定位方法的流程示意图; 图2为本申请所提供的一种条形码矫正方法的流程示意图; 图3为本申请所提供的一种条形码定位装置的结构示意图; 图4为本申请所提供的一种条形码定位设备的结构示意图。











