
技术摘要:
本发明公开了一种多特征耦合及目标探测的工业自动化监控方法,面向生产安全保障及作业规范监控,旨在准确辨识工业生产环境中运动目标,解决复杂场景中目标难以准确探测的难题。所提出的多特征融合及目标探测过程主要包括种子点的选择和扩散。在种子点选择过程中,融合 全部
背景技术:
运动目标探测是工业自动化监控的关键技术,旨在保障工业生产安全、提高生产 效率。通过对工业生产过程中关键生产过程、作业人员等运动目标的探测及辨识能够发现 非规范性作业、危险区域闯入及设备故障等,防止工业生产事故的发生。总体上,现有工业 生产过程中运动目标探测技术多移植和沿用普通场景和光学环境中的目标探测方法,如背 景建模法和运动检测法,难以适用于工业生产过程中复杂的场景及非均匀的光学环境,表 现出较强的不适定性,目标探测的检出率较低漏检率较高。
技术实现要素:
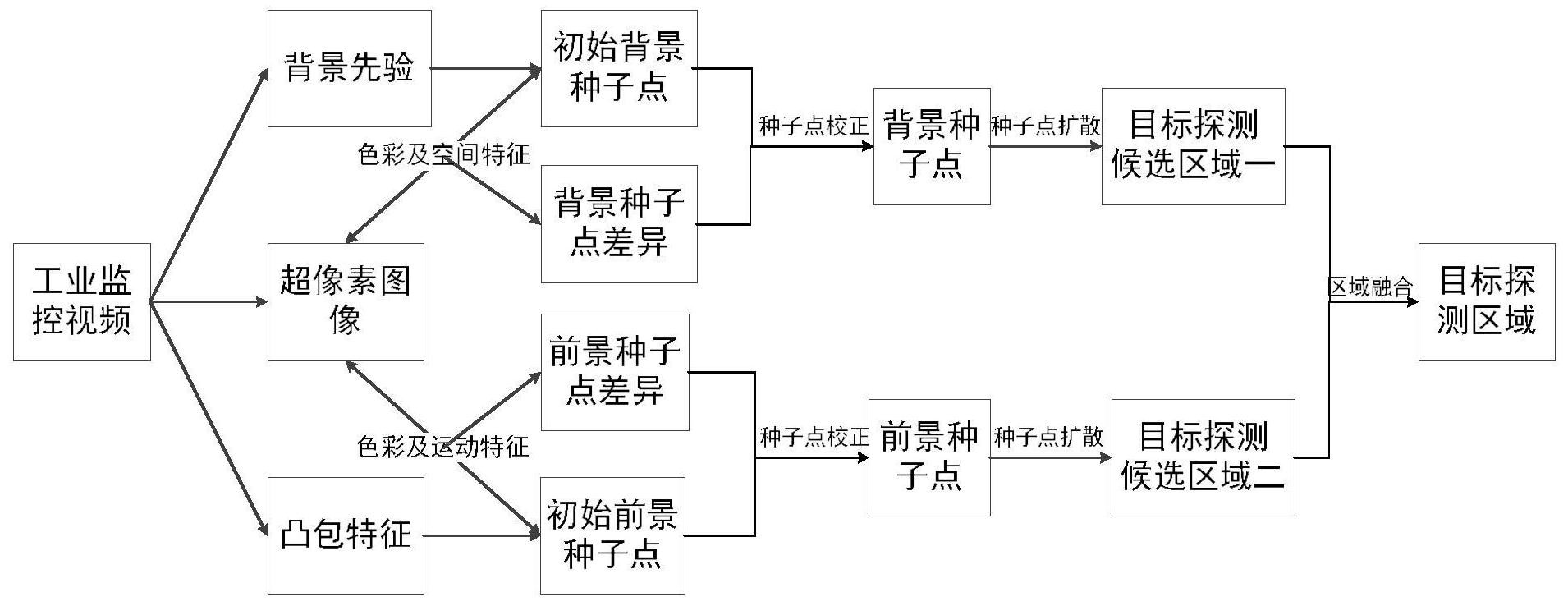
发明目的:针对现有技术中存在的问题与不足,本发明提供一种多特征耦合及目 标探测的工业自动化监控方法,考虑到场景的外部先验(即背景处于场景边界区域)、内部 图像特征(主要包括纹理特征、色彩特征、空间特征、运动特征)综合选择背景和前景种子点 并扩散,分别形成两个目标探测结果。融合基于前景种子点的目标探测候选区域结果和基 于背景种子点的目标探测候选区域,稳定探测工业生产场景中的运动目标。 技术方案:一种多特征耦合及目标探测的工业自动化监控方法,基于背景种子点 扩散的目标探测候选区域辨识、基于前景种子点扩算的目标探测候选区域辨识;最终通过 两个候选区域间的融合,辨识出目标探测区域,以实现对工业自动化生产过程的智能监控; 综合利用多种外部先验知识及内部图像特征优化提取工业生产场景中背景及前景种子点, 并采用基于图模型的种子点扩散方法对种子点进行扩散,并对扩散后得到的目标探测候选 区域进行融合,实现目标探测及工业自动化监控;主要包括背景种子点选择、前景种子点选 择、种子点扩算及目标探测候选区域融合四步。 (1)背景种子点选择 背景种子点选择包括基于背景先验、色彩及空间特征的初始背景种子点选择、种 子点差异计算及种子点优化过程,以实现基于背景种子点的目标探测候选区域辨识。 首先,计算工业监控场景的超像素分割区域,并根据背景先验知识(即背景通常靠 近场景边界区域)及超像素区域内的纹理特征共同选择初始背景种子点。在此选择阈值滤 波作为初始背景种子点选择准则: 其中,BSi′为候选背景种子点标签,i为超像素点标签,true为初始背景种子点, fasle为非初始背景种子点,di为超像素中心距离边界的距离,T为纹理密度阈值,ε为距离 边界的阈值,BFi为纹理密度,可以计算为: 4 CN 111583245 A 说 明 书 2/5 页 其中,li为第i个超像素区间内的纹理长度,Ni为第i个超像素区间的面积。 其次,计算判断初始背景种子点间的差异度 其中, 为第i个初始背景种子的差异度, 为第i个初始背景种子点同第k 个初始背景种子间在RGB空间中的色彩差异度, 第i个初始背景种子点同第k个初始背 景种子间的空间距离,α为调制参数。 最后,背景种子点选择准则为: 其中,η为初始背景种子点差异度的阈值。 (2)前景种子点选择 前景种子点选择包括基于凸包特征、色彩及运动特征的初始前景种子点选择、种 子点差异计算及种子点优化过程,以实现基于前景种子点的目标探测候选区域辨识。 首先,计算工业监控场景的凸包以选择初始前景种子点。 其中,FSm′为所选择到的初始前景种子点标签,m为超像素点标签,RΦ为凸包区域, true为初始前景种子点,fasle为非初始前景种子点,FSm为前景种子点可能出现的超像素 区域。 其次,计算判断初始前景种子点间的差异度 其中, 为第m个初始前景种子的差异度, 为第m个初始前景种子点同第j 个初始前景种子间在RGB空间中的色彩差异度, 第m个初始前景种子点同第j个初始前 景种子间光流运动信息差异度,β为调制参数。 其中,λ为初始前景种子点差异度的阈值。 (3)种子点扩散 采用基于图模型的种子点传播方法,实现工业场景中目标准确探测。 5 CN 111583245 A 说 明 书 3/5 页 其中,wij表示图模型节点(对应于种子点超像素区域)i和j之间的权重,dii为第i 个节点的权重值dii=∑jwij,djj为第j个节点的权重值djj=∑iwij,fi,fj分别表示节点i,j的 排序值,y=[y1,y2...,yn]T,为指示向量,如果xi为种子节点,则yi=1,否则yi=0,μ为常数 项,通常设为0.01。 (4)目标探测结果融合 采用偏执型融合方式融合基于背景种子点的目标探测候选区域辨识结果和基于 前景种子点的目标探测候选区域辨识结果: 其中 是融合后的最终目标探测结果, 为基于背景种子点的目标探测候选区 域辨识结果, 为背景、前景探测结果间的交互,计算为: 其中, 为基于前景种子点的目标探测候选区域辨识结果,γ、υ和 为调制参数。 附图说明 图1是本发明方法框架图。











