
技术摘要:
本发明涉及机器人技术领域,具体涉及多用途内墙处理机器人,移动转弯装置,升降装置,升降侧挡板组件,上固定座体,执行机器人装置,电气控制装置;所述移动转弯装置的顶部连接有升降装置;所述升降装置的顶部连接有上固定座体。通过移动转弯装置,实现空间的移动转弯 全部
背景技术:
目前市场上打磨、拉毛、粉墙等内墙打磨机器人都是功能比较单一,不同工序内墙 作业机器人需要更换相应的机器人设备,才能完成整个施工流程,甚至现在大量简易施工 还采用人工的方式进行,远远不能满足现代建筑的高效快速施工的需求,同时也会给工作 人员带来身体上的危害。 目前市场没有发现可以通过更换未端执行器,例如更换打磨、拉毛、粉墙等功能模 块,即可实现施工工序的快速转换的内墙作业机器人;目前也没有发现将升降平台、自驱动 小车和多自由度机器人技术相结合以实现内墙多工序一次性完成的内墙作业机器人产品。 有鉴于此,本发明提出了多用途内墙处理机器人,可以智能实现移动转弯升降和 全方位运动,实现在室内无死角工作,可以长时间运作,大大减少工作量,显著提升工作效 率,解放人工成本,从而不会危害人体健康。
技术实现要素:
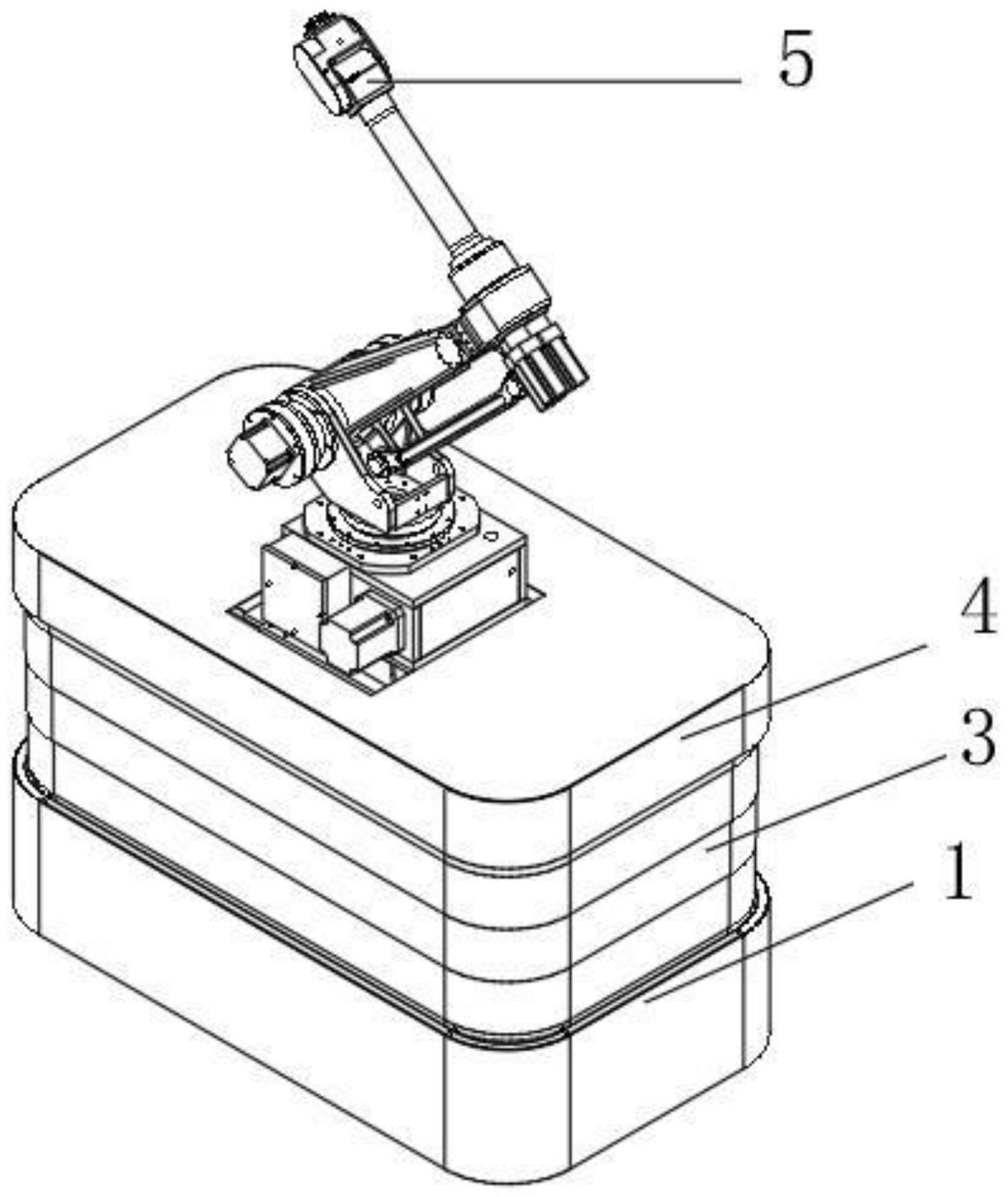
为了解决上述问题,本发明提出多用途内墙处理机器人,主要针对建筑内墙的处 理,包括打磨,拉毛,粉刷等内墙内部处理。 多用途内墙处理机器人,包括移动转弯装置,升降装置,上固定座体;所述移动转 弯装置的顶部连接有升降装置;所述升降装置的顶部连接有上固定座体。 进一步的改进在于:所述升降装置包括升降动力装置、连接轴套件、C型滑轨、定位 轴、升降剪刀组件和上定位滑轨组件、滚轮组;所述C型滑轨与移动小车车体固定连接;所述 升降剪刀组件的顶部与上定位滑轨组件连接;所述升降剪刀组件底部的一端与定位轴连 接,所述定位轴固定在C型滑轨的一端;所述升降剪刀组件底部的另一端与连接轴套件连 接,所述连接轴套件两端分别通过滚轮组与C型滑轨活动连接;所述连接轴套件与升降动力 装置连接,所述升降动力装置控制连接轴套件在C型滑轨上滑动从而控制升降剪刀组件的 伸缩。 进一步的改进在于:所述升降动力装置包括升降动力源、升降动力源安装板、定位 板一、定位板二、直线轴承组件、定位板三、底部轴承组件、滚动丝杆组件;所述连接轴套件 与定位板二固定连接;所述定位板一和定位板二分别与移动小车车体固定连接;所述升降 动力源安装在升降动力源安装板上;所述升降动力源安装板安装在定位板一上;所述升降 动力源连接有滚动丝杆组件;所述滚动丝杆组件包括丝杆和丝杆螺母;所述丝杆依次穿过 升降动力源安装板、定位板一、定位板二,丝杆的末端通过底部轴承组件与定位板三连接; 所述丝杆的两侧分别设置有直线轴承组件,所述直线轴承组件依次穿过定位板一、定位板 二、定位板三。 进一步的改进在于:所述上定位滑轨组件包括直线导轨二、剪刀连接座、直线导轨 4 CN 111571346 A 说 明 书 2/5 页 安装板二;所述直线导轨二安装在直线导轨安装板二上;所述直线导轨安装板二与上固定 座体连接;所述剪刀连接座一端与升降剪刀组件连接;另一端与直线导轨二活动连接。 进一步的改进在于:所述移动转弯装置包括移动小车车体以及设置在移动小车车 体内部一侧的从动轮组和设置在移动小车车体内部另一侧的单动双驱动力装置;所述单动 双驱动力装置用于提供移动小车车体移动和转弯功能的动力。 进一步的改进在于:所述单动双驱动力装置包括驱动轮组装置、转弯动力装置、固 定板、定位滑轨组件和齿条;所述固定板的底部两端各设置有一组驱动轮组装置;所述固定 板的底部设置有一组转弯动力装置;所述固定板与移动小车车体固定连接;所述定位滑轨 组件位于固定板的上方;所述齿条安装在定位滑轨组件上。 进一步的改进在于:所述定位滑轨组件包括直线导轨一,齿条安装件,直线导轨安 装板一;所述直线导轨一与直线导轨安装板一活动连接,所述直线导轨一可在直线导轨安 装板一上滑动;所述直线导轨安装板一与移动小车车体连接。 进一步的改进在于:所述转弯动力装置包括转弯动力电机、减速机、主动转向齿 轮;所述转弯动力装置固定在固定板底部;所述转弯动力电机与减速机相连接;所述主动转 向齿轮与减速机相连接;所述固定板上设置有与主动转向齿轮大小相匹配的通孔,所述主 动转向齿轮穿过通孔伸出固定板外表面与所述齿条相啮合。 进一步的改进在于:所述驱动轮组装置包括动力源、轮组固定座、从动转向齿轮、 主移动齿轮、转向固定座、轴承、减震装置、移动轮、从动移动齿轮;所述动力源连接在所述 轮组固定座上的一侧;所述动力源与主移动齿轮相连接从而带动主移动齿轮转动;所述主 移动齿轮与从动移动齿轮啮合连接带动从动移动齿轮转动;所述轮组固定座下方连接有移 动轮;所述从动移动齿轮通过连接件与移动轮固定连接;所述轮组固定座的顶部固定连接 有减震装置;所述从动转向齿轮固定连接从动转向齿轮转轴;所述从动转向齿轮转轴通过 轴承连接有转向固定座;所述转向固定座的顶部与固定板的底部固定连接;所述从动转向 齿轮转轴的底部与减震装置顶部固定连接;所述固定板上设置有与从动转向齿轮大小相匹 配的通孔,所述从动转向齿轮穿过通孔伸出固定板外表面与所述齿条相啮合。 进一步的改进在于:还包括升降侧挡板组件,所述升降侧挡板组件的顶部与上固 定座体连接;所述侧挡板组件为可伸缩结构;所述升降侧挡板组件的底部与移动转弯装置 连接;所述升降装置位于所述升降侧挡板组件内部。 进一步的改进在于:还包括执行机器人装置;所述执行机器人装置包括固定底座、 旋转装置、摆动装置一、摆臂一、摆动装置二、摆臂二、执行终端装置;所述固定底座安装在 所述上固定座体上;所述旋转装置与固定底座连接;所述摆臂一通过摆动装置一与旋转装 置连接;所述摆臂二通过摆动装置二与摆臂一连接;所述执行终端装置与摆臂二连接。 进一步的改进在于:所述执行终端装置为打磨装置、拉毛装置,粉刷装置中的一 种。 进一步的改进在于:还包括电气控制装置,所述电气控制装置位于所述上固定座 体内部;用于对多用途内墙处理机器人发出工作指令。 本发明的有益效果: 本发明多用途内墙处理机器人通过移动转弯装置,实现空间的移动转弯;通过升 降装置,实现空间高度变化动作;通过升降侧挡板组件,实现防尘,防杂物进入系统内部;通 5 CN 111571346 A 说 明 书 3/5 页 过上固定座体上连接固定执行机器人装置,下连接固定升降装置,通过执行机器人装置,实 现内墙最终处理,打磨,拉毛,粉刷等,最终实现无死角工作。 附图说明 图1为发明多用途内墙处理机器人的整体结构图; 图2为发明多用途内墙处理机器人的横截面图; 图3为发明多用途内墙处理机器人的移动转弯装置结构图; 图4为发明多用途内墙处理机器人的单动双驱动力转弯装置结构图; 图5为发明多用途内墙处理机器人的驱动轮组装置结构图; 图6为发明多用途内墙处理机器人的单动双驱动力转弯装置侧视图; 图7为发明多用途内墙处理机器人的转弯动力装置结构图; 图8为发明多用途内墙处理机器人的定位滑轨组件结构图; 图9为发明多用途内墙处理机器人的升降装置结构图; 图10为发明多用途内墙处理机器人的升降动力装置结构图; 图11为发明多用途内墙处理机器人的升降剪刀组件结构图; 图12为发明多用途内墙处理机器人的上定位滑轨组件结构图; 图13为发明多用途内墙处理机器人的执行机器人装置结构图。 附图标记说明: 1-移动转弯装置、2-升降装置、3-升降侧挡板组件、4-上固定座体、5-执行机器人 装置、6-电气控制装置、7-移动小车车体、8-从动轮组、9-单动双驱动力装置、10-驱动轮组 装置、11-转弯动力装置、12-固定板、13-定位滑轨组件、14-齿条、15-动力源、16-轮组固定 座、17-从动转向齿轮、18-主移动齿轮、19-转向固定座、20-轴承、21-减震装置、22-移动轮、 23-从动移动齿轮、24-转弯动力电机、25-减速机、26-主动转向齿轮、27-齿条安装件、28-直 线导轨一、29-直线导轨安装板一、30-升降动力装置、31-连接轴套件、32-C型滑轨、33-定位 轴、34-升降剪刀组件、35-上定位滑轨组件、36-滚轮组、37-升降动力源、38-升降动力源安 装板、39-定位板一、40-定位板二、41-直线轴承组件、42-定位板三、43-底部轴承组件、44- 滚动丝杆组件、45-剪刀板、46-剪刀板轴承、47-销轴、48-直线导轨二、49-剪刀连接座、50- 直线导轨安装板二、51-固定底座、52-旋转装置、53-摆臂一、54-摆臂二、55-执行终端装置。











