
技术摘要:
本发明提供了一种用于搬运码垛的机器人,其特征在于包括有:主体,所述主体的下方设有带动主体转动的旋转座,所述主体的后面设有驱动装置和控制驱动装置的电控盒,所述主体上设有轨道,所述的轨道内设有可在轨道内上下移动的机械臂,本发明具有占用空间小、码垛范围大、 全部
背景技术:
】 为了节约空间,工厂内都会将物品码垛成堆。这样便于能放置更多的数量的物品, 节约仓储成本。但目前的码垛大多依靠人力,不仅浪费人力,在码垛到较高的位置时,人力 码垛极为不便。为此,研发出一种用于搬运码垛的机器人。 【
技术实现要素:
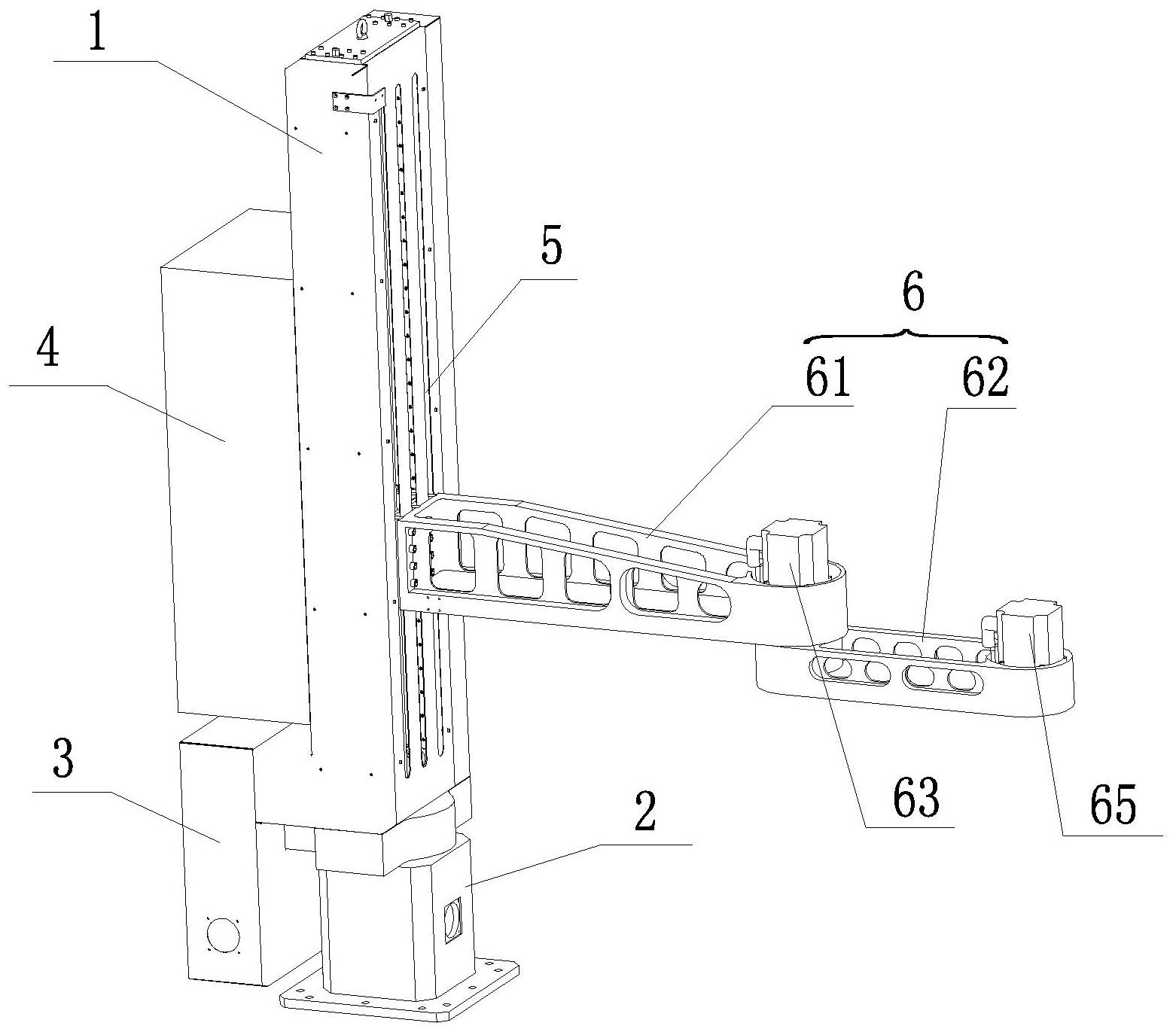
】 本发明的目的为了解决物品的码垛问题,提供了一种用于搬运码垛的机器人。 为了解决上述问题,本发明提供以下技术方案: 本发明提供了一种用于搬运码垛的机器人,其特征在于包括有:主体,所述主体的 下方设有带动主体转动的旋转座,所述主体的后面设有驱动装置和控制驱动装置的电控 盒,所述主体上设有轨道,所述的轨道内设有可在轨道内上下移动的机械臂。 如上所述的一种用于搬运码垛的机器人,其特征在于所述的机械臂包括有:固定 臂、转动臂;所述的转动臂与固定臂可转动连接。 如上所述的一种用于搬运码垛的机器人,其特征在于所述的固定臂与转动臂连接 处设有电机一和旋转体一;所述的电机一连接旋转体一,通过带动旋转体一带动转动臂转 动。 如上所述的一种用于搬运码垛的机器人,其特征在于所述的转动臂的另一端设有 电机四和旋转体三,所述的电机四连接旋转体三并带动旋转体三转动。 如上所述的一种用于搬运码垛的机器人,其特征在于所述的驱动装置包括有:电 机二、与电机二连接的驱动轮。 如上所述的一种用于搬运码垛的机器人,其特征在于主体内部设有传动机构,所 述的传动机构通过皮带与驱动轮连接。 如上所述的一种用于搬运码垛的机器人,其特征在于所述的传动机构包括有:上 皮带轮和下皮带轮;所述的上皮带轮和下皮带轮通过皮带进行连接,同步转动,所述的下皮 带轮同轴连接传动轮,所述的传动轮通过皮带与驱动轮连接。 如上所述的一种用于搬运码垛的机器人,其特征在于旋转座包括有:旋转座壳体; 所述的旋转座壳体的内部设有电机三及旋转体二。 如上所述的一种用于搬运码垛的机器人,其特征在于所述旋转座壳体的上方设有 连接旋转座及主体的连接件。 本发明具有以下优点: 1、本发明所指的一种用于搬运码垛的机器人,主体相对于旋转座可以旋转,转动 臂相对于固定臂可以旋转,可以根据需要调整角度,可以节约机械手的占用空间,码垛更大 的范围。 3 CN 111590552 A 说 明 书 2/3 页 2、本发明所指的一种用于搬运码垛的机器人,机械臂采用直臂,占用空间小,可码 垛不同高度的物品,适用范围广,码垛的效率高。 3、本发明所指的一种用于搬运码垛的机器人,驱动轮与传动装置采用皮带连接, 传动平稳、噪音小。 【附图说明】 图1是本发明整体示意图; 图2是本发明爆炸示意图; 图3是驱动装置与传动机构连接示意图; 图4是本发明剖面示意图。 【











