
技术摘要:
本发明公开了基于车路协同的上匝道协同并道控制方法,在初始时刻,判断主干道上的协同车辆的类型;若协同车辆为网联人驾驶车辆,则诱导控制该车辆的驾驶员,使得该车辆按照第一期望行为行驶,或者直接控制车辆,使得该车辆按照第二期望行为行驶;若协同车辆为网联自动 全部
背景技术:
随着自动驾驶技术和车联网技术的逐渐深入研究,网联人驾车和网联自动驾驶车 辆必将成为未来智能交通的主要组成部分。而作为导致快速路拥堵的主要原因之一的上匝 道口的车辆融合,在网联人驾车和网联自动驾驶车辆都存在的混合交通中也是亟需解决的 重要问题。基于车路协同的协同优化合并控制方法能够很好的解决混合交通中的上匝道合 并问题。 通过仿真试验可以得出,在混合交通中,无论主干道的协同车辆是网联人驾车还 是网联自动驾驶车辆,都能够成功实现并道,且安全、效率和舒适度都有所提高。目前的研 究中,大多都仅仅单一考虑主干道的协同车辆是传统人驾车辆。专利CN201811084048.X采 用毫米波雷达作为路口车辆信息检测方式,通过向感兴趣区域发射微波实现对车辆的实时 信息显示及跟踪,再通过信息显示屏为驾驶员提供交通信息,但是并没有考虑驾驶员的特 性以及混合交通情况下网联自动驾驶车辆的运动状态控制。此外,专利CN201711158579.4 通过在高速公路服务区设置车辆检测模块来预警车辆的到来,从而确保车辆能够安全并 道。但是,该方法仅仅提示并道车辆主干道是否来车的信息,并没有提供更多关于安全、效 率的信息,且针对的对象也仅仅是传统车辆,并没有考虑混合交通情况下的并道。
技术实现要素:
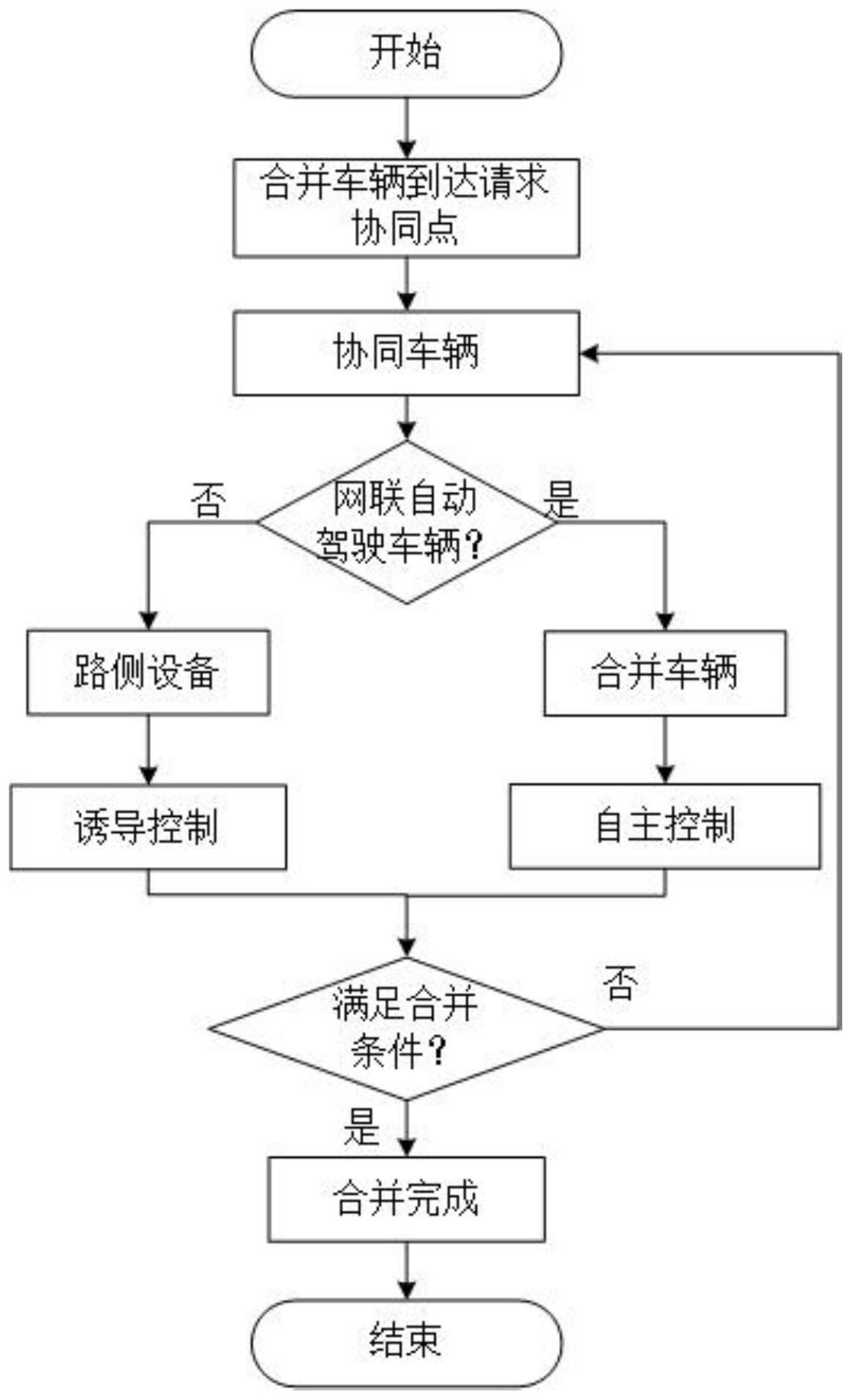
有鉴于此,本发明的目的是提供基于车路协同的上匝道协同并道控制方法。 本发明的目的是通过以下技术方案实现的: 基于车路协同的上匝道协同并道控制方法, 在初始时刻,判断主干道上的协同车辆的类型; 若协同车辆为网联人驾驶车辆,则诱导控制该车辆的驾驶员,使得该车辆按照第 一期望行为行驶,或者直接控制车辆,使得该车辆按照第二期望行为行驶; 若协同车辆为网联自动驾驶车辆,则直接控制车辆,该车辆按照第二期望运动行 为行驶; 判断该时刻是否满足合并条件,若满足则合并完成,如不满足则继续进行车辆合 并。 进一步,所述第一期望行为的目标函数为网联人驾车驾驶员获得能够实现的合理 的参考状态,所述第二期望行为的目标函数为网联自动驾驶车辆获得最优的行驶状态和行 驶舒适度, 具体的:所述第一期望行为的目标函数为: 4 CN 111583640 A 说 明 书 2/6 页 所述第二期望行为的目标函数为: 其中:uvir(t)为网联人驾车驾驶员获得能够实现的合理的参考状态; u(t)为所述第二期望行为的行驶舒适度和行驶状态,t0是合并过程的开始时刻,tf 是合并的结束时刻。 进一步,所述第一期望行为的获取方法为: 根据所述第一期望行为的目标函数的解析解,得到诱导网联人驾车合并的轨迹信 息,结合网联人驾车的跟随特性,得到所述第一期望行为。 进一步,所述网联人驾车的跟随特性的模型为: 其中,fCHV是抽象函数,vper是前车速度,Δxper是本车与前车的位置差,Δvper是本 车与前车的速度差, 是驾驶员对前车速度的反应时延, 是驾驶员对车间距的反应时 延, 是驾驶员对速度差的反应时延,vcn是与本车网联的其他车辆的速度,Δxcn是与本车 网联的其他车辆跟本车之间的位置差,Δvcn是与本车网联的其他车辆跟本车之间的速度 差,τcn是驾驶员对其他网联车辆信息的反应时延,vCHV是网联人驾车的速度,ΔxCHV是网联人 驾车的车头距,ΔvCHV是网联人驾车的速度差; 同时 其中mv,mΔx,mΔv分别是驾驶员自身驾驶习惯与所获得信息之间的权重系数。 进一步,所述第二期望行为的获取方法为: 结合互联网自动驾驶车辆的终端状态和起始状态,获取所述第二期望行为的目标 函数的解析解。 进一步,所述终端状态为: 5 CN 111583640 A 说 明 书 3/6 页 所述起始状态为: 本发明的有益效果是: 本发明保证协同车辆无论是网联人驾车还是网联自动驾驶车,都能够实现安全高 效且舒适的上匝道合并。 本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并 且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可 以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和 获得。 附图说明 为了使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明作进 一步的详细描述,其中: 附图1为本发明流程图; 附图2为混合交通上匝道系统合并前示意图; 附图3为混合交通上匝道系统合并后示意图。











