
技术摘要:
本发明涉及一种励磁控制器控制方法及系统,涉及电力系统稳定性控制技术领域。该方法包括:利用PID控制和励磁控制系统数学模型确定控制策略的参数;利用励磁控制系统的第k次采样误差值、第k次采样误差值与第k‑1次采样误差值的第一误差差值以及第k‑1次采样误差值与第k 全部
背景技术:
电力系统的稳定性对电网的安全性和可靠性有着重要影响,通过各种各样的措施 来增强电力系统的稳定性,对于社会经济的健康发展和人们生活质量的提高有着十分重要 的意义。励磁控制器是同步发电机控制系统的核心,可以对发电机励磁系统进行有效的控 制,是使电力系统稳定运行的重要措施。常规PID控制(proportional-integral- derivative control,比例积分微分控制)在励磁控制器上的应用虽然非常成熟,但采用这 种控制方式的励磁控制器的参数固定,控制律单一,无法根据发电机励磁系统的工作状态 及误差情况来自动改变励磁控制律,以及调整励磁控制器的参数,导致励磁控制器适应对 象特性的能力较差。因此,现有励磁控制器存在适应性差的问题。
技术实现要素:
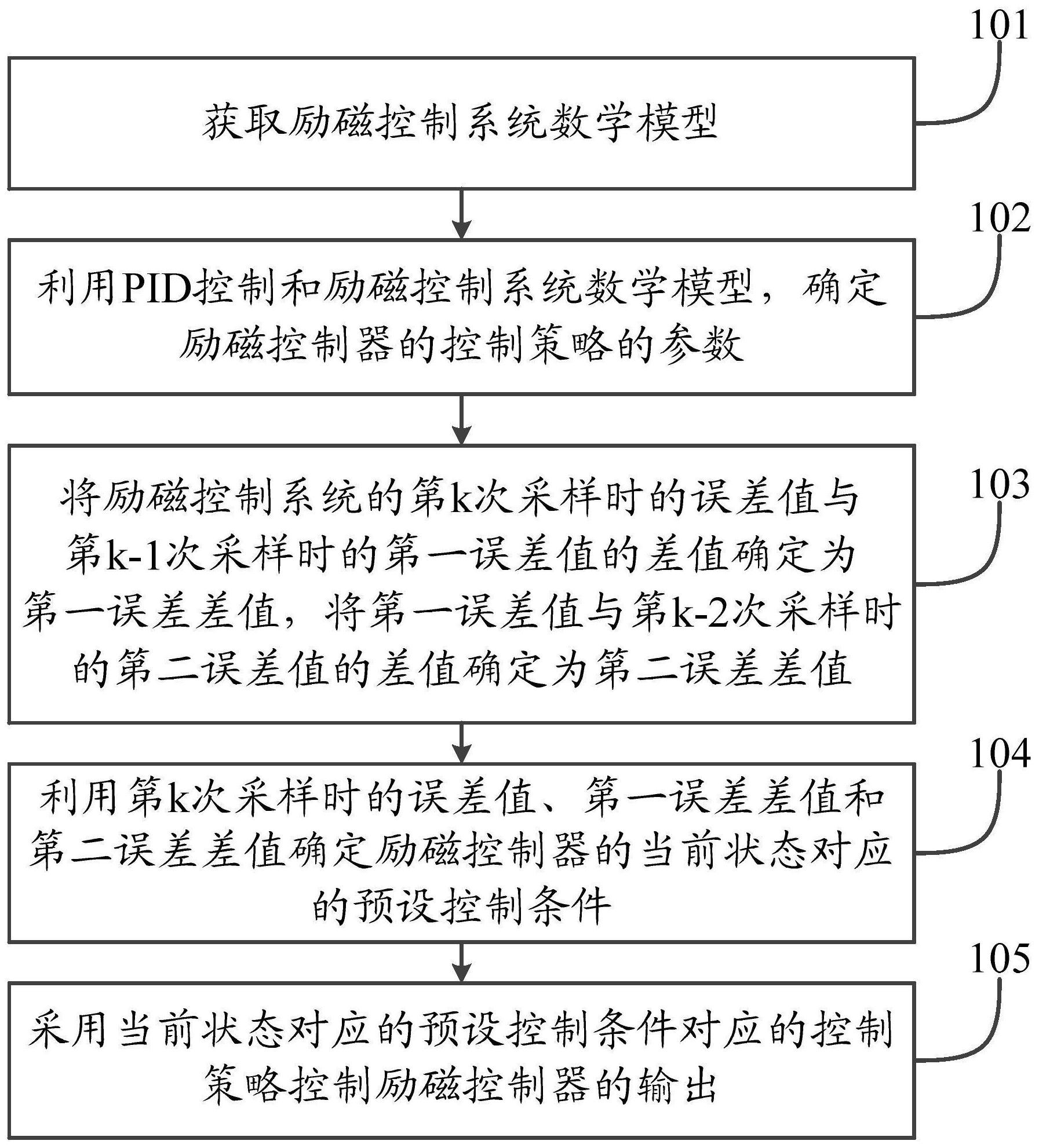
本发明的目的是提供一种励磁控制器控制方法及系统,解决了现有励磁控制器适 应性差的问题。 为实现上述目的,本发明提供了如下方案: 一种励磁控制器控制方法,包括: 获取励磁控制系统数学模型; 利用PID控制和所述励磁控制系统数学模型,确定励磁控制器的控制策略的参数; 所述参数包括:比例系数、积分系数和微分系数; 将励磁控制系统的第k次采样时的误差值与第k-1次采样时的第一误差值的差值 确定为第一误差差值,将所述第一误差值与第k-2次采样时的第二误差值的差值确定为第 二误差差值;其中k表示采样次数; 利用所述第k次采样时的误差值、所述第一误差差值和所述第二误差差值确定所 述励磁控制器的当前状态对应的预设控制条件;所述预设控制条件包括:第一预设控制条 件、第二预设控制条件、第三预设控制条件、第四预设控制条件和第五预设控制条件; 采用当前状态对应的预设控制条件对应的控制策略控制所述励磁控制器的输出。 可选的,所述利用所述第k次采样时的误差值、所述第一误差差值和所述第二误差 差值确定所述励磁控制器的当前状态对应的预设控制条件,具体包括: 判断所述第k次采样时的误差值的绝对值是否大于第一预设误差阈值,得到第一 判断结果; 若所述第一判断结果为是,则所述当前状态对应的预设控制条件为第一预设控制 条件; 若所述第一判断结果为否,则判断所述第k次采样时的误差值与所述第一误差差 5 CN 111600521 A 说 明 书 2/16 页 值的乘积是否大于零或所述第一误差差值是否等于零,得到第二判断结果; 若所述第二判断结果为是,则所述当前状态对应的预设控制条件为第二预设控制 条件; 若所述第二判断结果为否,则判断所述第k次采样时的误差值与所述第一误差差 值的乘积是否小于零且所述第一误差差值与所述第二误差差值的乘积是否大于零,或者所 述第k次采样时的误差值是否等于零,得到第三判断结果; 若所述第三判断结果为是,则所述当前状态对应的预设控制条件为第三预设控制 条件; 若所述第三判断结果为否,则判断所述第k次采样时的误差值与所述第一误差差 值的乘积是否小于零且所述第一误差差值与所述第二误差差值的乘积是否小于零,得到第 四判断结果; 若所述第四判断结果为是,则所述当前状态对应的预设控制条件为第四预设控制 条件; 若所述第四判断结果为否,则判断所述第k次采样时的误差值的绝对值是否小于 励磁控制系统误差的预设精度,得到第五判断结果; 若所述第五判断结果为是,则所述当前状态对应的预设控制条件为第五预设控制 条件。 可选的,当所述当前状态对应的预设控制条件为第一预设控制条件时,所述采用 当前状态对应的预设控制条件对应的控制策略控制所述励磁控制器的输出,具体包括: 将所述励磁控制器的输出确定为预设定值,并对所述励磁控制系统进行开环控 制。 可选的,当所述当前状态对应的预设控制条件为第二预设控制条件时,所述采用 当前状态对应的预设控制条件对应的控制策略控制所述励磁控制器的输出,具体包括: 判断所述第k次采样时的误差值的绝对值是否大于或等于第二预设误差阈值,得 到第六判断结果; 若所述第六判断结果为是,则根据公式u(k)=u(k-1) K1Kpe(k)确定所述励磁控制 器的输出;其中,u(k)表示所述励磁控制器的输出,u(k-1)表示第k-1次采样时所述励磁控 制器的输出,K1表示所述励磁控制系统的放大系数,Kp表示所述比例系数,e(k)表示所述第k 次采样时的误差值; 若所述第六判断结果为否,则根据公式u(k)=u(k-1) K2Kpe(k)确定所述励磁控制 器的输出;其中,K2表示所述励磁控制系统的抑制系数。 可选的,当所述当前状态对应的预设控制条件为第三预设控制条件时,所述采用 当前状态对应的预设控制条件对应的控制策略控制所述励磁控制器的输出,具体包括: 保持所述励磁控制器的输出。 可选的,当所述当前状态对应的预设控制条件为第四预设控制条件时,所述采用 当前状态对应的预设控制条件对应的控制策略控制所述励磁控制器的输出,具体包括: 判断所述第k次采样时的误差值的绝对值是否大于或等于所述第二预设误差阈 值,得到第七判断结果; 若所述第七判断结果为是,则根据公式u(k)=u(k-1) K1Kpe(k-1)确定所述励磁控 6 CN 111600521 A 说 明 书 3/16 页 制器的输出;其中,u(k)表示所述励磁控制器的输出,u(k-1)表示第k-1次采样时所述励磁 控制器的输出,K1表示所述励磁控制系统的放大系数,Kp表示所述比例系数,e(k-1)表示所 述第一误差值; 若所述第七判断结果为否,则根据公式u(k)=u(k-1) K2Kpe(k-1)确定所述励磁控 制器的输出;其中,K2表示所述励磁控制系统的抑制系数。 可选的,当所述当前状态对应的预设控制条件为第五预设控制条件时,所述采用 当前状态对应的预设控制条件对应的控制策略控制所述励磁控制器的输出,具体包括: 根据公式 确定所述励磁控制器的输出; 其中,u(k)表示所述励磁控制器的输出,Kp表示所述比例系数,e(k)表示所述第k次采样时 的误差值,Ki表示所述积分系数,j表示采样次数,e(j)表示第j次采样时的误差值,Kd表示所 述微分系数,Δe(k)表示第一误差差值。 一种励磁控制器控制系统,包括: 数学模型获取模块,用于获取励磁控制系统数学模型; 参数确定模块,用于利用PID控制和所述励磁控制系统数学模型,确定励磁控制器 的控制策略的参数;所述参数包括:比例系数、积分系数和微分系数; 差值确定模块,用于将励磁控制系统的第k次采样时的误差值与第k-1次采样时的 第一误差值的差值确定为第一误差差值,将所述第一误差值与第k-2次采样时的第二误差 值的差值确定为第二误差差值;其中k表示采样次数; 预设控制条件确定模块,用于利用所述第k次采样时的误差值、所述第一误差差值 和所述第二误差差值确定所述励磁控制器的当前状态对应的预设控制条件;所述预设控制 条件包括:第一预设控制条件、第二预设控制条件、第三预设控制条件、第四预设控制条件 和第五预设控制条件; 控制励磁控制器输出模块,用于采用当前状态对应的预设控制条件对应的控制策 略控制所述励磁控制器的输出。 可选的,所述预设控制条件确定模块,具体包括: 第一判断单元,用于判断所述第k次采样时的误差值的绝对值是否大于第一预设 误差阈值,得到第一判断结果; 第一预设控制条件确定单元,用于当所述第一判断结果为是时,所述当前状态对 应的预设控制条件为第一预设控制条件; 第二判断单元,用于当所述第一判断结果为否时,判断所述第k次采样时的误差值 与所述第一误差差值的乘积是否大于零或所述第一误差差值是否等于零,得到第二判断结 果; 第二预设控制条件确定单元,用于当所述第二判断结果为是时,所述当前状态对 应的预设控制条件为第二预设控制条件; 第三判断单元,用于当所述第二判断结果为否时,判断所述第k次采样时的误差值 与所述第一误差差值的乘积是否小于零且所述第一误差差值与所述第二误差差值的乘积 是否大于零,或者所述第k次采样时的误差值是否等于零,得到第三判断结果; 第三预设控制条件确定单元,用于当所述第三判断结果为是时,所述当前状态对 7 CN 111600521 A 说 明 书 4/16 页 应的预设控制条件为第三预设控制条件; 第四判断单元,用于当所述第三判断结果为否时,判断所述第k次采样时的误差值 与所述第一误差差值的乘积是否小于零且所述第一误差差值与所述第二误差差值的乘积 是否小于零,得到第四判断结果; 第四预设控制条件确定单元,用于当所述第四判断结果为是时,所述当前状态对 应的预设控制条件为第四预设控制条件; 第五判断单元,用于当所述第四判断结果为否时,判断所述第k次采样时的误差值 的绝对值是否小于励磁控制系统误差的预设精度,得到第五判断结果; 第五预设控制条件确定单元,用于当所述第五判断结果为是时,所述当前状态对 应的预设控制条件为第五预设控制条件。 可选的,所述控制励磁控制器输出模块,具体包括: 开环控制单元,用于当所述当前状态对应的预设控制条件为第一预设控制条件 时,将所述励磁控制器的输出确定为预设定值,并对所述励磁控制系统进行开环控制。 根据本发明提供的具体实施例,本发明公开了以下技术效果: 本发明提供了一种励磁控制器控制方法及系统。该方法包括:获取励磁控制系统 数学模型;利用PID控制和励磁控制系统数学模型,确定励磁控制器的控制策略的参数;参 数包括:比例系数、积分系数和微分系数;将励磁控制系统的第k次采样时的误差值与第k-1 次采样时的第一误差值的差值确定为第一误差差值,将第一误差值与第k-2次采样时的第 二误差值的差值确定为第二误差差值;其中k表示采样次数;利用第k次采样时的误差值、第 一误差差值和第二误差差值确定励磁控制器的当前状态对应的预设控制条件;预设控制条 件包括:第一预设控制条件、第二预设控制条件、第三预设控制条件、第四预设控制条件和 第五预设控制条件;采用当前状态对应的预设控制条件对应的控制策略控制励磁控制器的 输出。本发明的励磁控制器控制方法及系统可根据励磁控制系统的工作状态及误差情况自 动确定不同的励磁控制律,即预设控制条件,使控制策略更加灵活;自动调整励磁控制器的 参数,提高了励磁控制器的适应性,使励磁控制器的适应性更强,体现了智能控制的特点, 使励磁控制系统的控制效果更好。 附图说明 为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所 需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施 例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图 获得其他的附图。 图1为本发明实施例所提供的励磁控制器控制方法的流程图; 图2为本发明实施例所提供的同步发电机励磁控制系统的结构图; 图3为本发明实施例所提供的励磁控制器控制系统的结构图; 图4为本发明实施例所提供的励磁系统的输出响应曲线图; 图5为本发明实施例所提供的励磁系统的误差变化曲线图; 图6为本发明实施例所提供的励磁系统的控制量变化曲线图。 符号说明:1、励磁控制器;2、功率放大单元;3、同步发电机;4、电压测量单元。 8 CN 111600521 A 说 明 书 5/16 页











