
技术摘要:
本申请提供一种基于深度相机的真实障碍物地图构建和导航方法及系统,通过深度相机获取各个角度下的环境障碍物的深度图像;选取深度图像位于深度相机平面以下的任意三个像素点构建平面;计算深度图像每一个像素点与平面的单位向量的外积,获得与平面共面的像素点;分析 全部
背景技术:
目前,要实现移动机器人在环境中的正常运行,通常都要对机器人所在的环境构 建地图,机器人的环境地图主要是由一系列的环境障碍物组成。为了实现机器人环境地图 的构建和地图建立后的导航工作,都需要机器人能够获取环境中的障碍物数据,现在主流 的障碍物地图构建方式是利用激光雷达传感器,它能够对所在平面360度的环境中进行扫 描,通过每个角度向外发射和接收激光达到对周围障碍物进行测距的目的,完成了障碍物 位置信息的获取。但是由于激光雷达只能对它所在的平面进行障碍物的检测,当障碍物低 于激光雷达平面时,就无法检测到该障碍物,导致机器人建立的环境地图不够准确;而且在 机器人导航时,由于机器人无法发现低于它的障碍物,导致机器人可能和障碍物相撞,损坏 机器人。所以需要提供一种方案以更为准确地建立环境地图,使机器人运行更加安全。
技术实现要素:
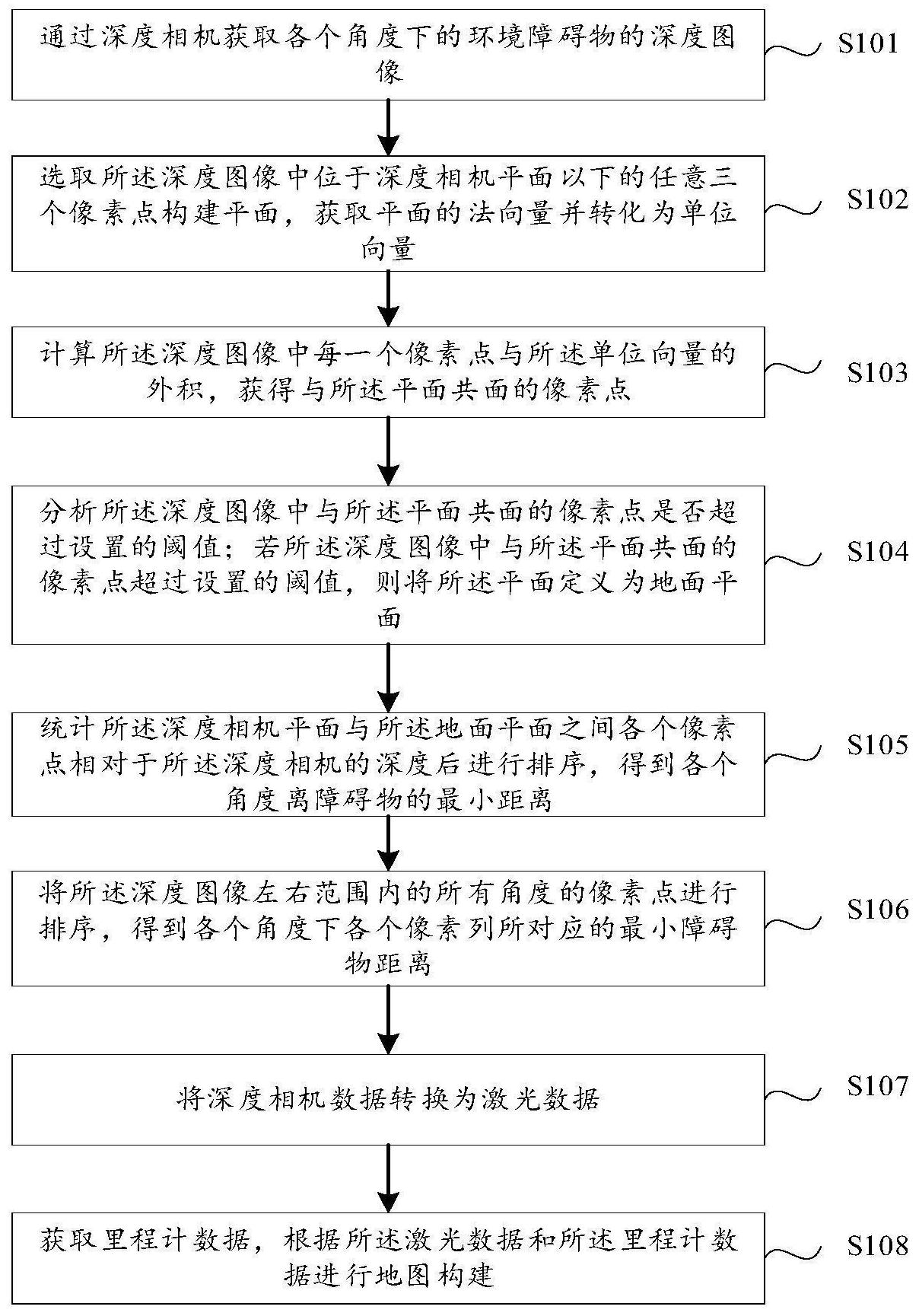
本申请的目的在于提供一种基于深度相机的真实障碍物地图构建和导航方法及 系统,用以实现更为准确地建立环境地图,使机器人运行更加安全的技术效果。 第一方面,本申请实施例提供了一种基于深度相机的真实障碍物地图构建和导航 方法,包括通过深度相机获取各个角度下的环境障碍物的深度图像;选取所述深度图像中 位于深度相机平面以下的任意三个像素点构建平面,获取平面的法向量并转化为单位向 量;计算所述深度图像中每一个像素点与所述单位向量的外积,获得与所述平面共面的像 素点;分析所述深度图像中与所述平面共面的像素点是否超过设置的阈值;若所述深度图 像中与所述平面共面的像素点超过设置的阈值,则将所述平面定义为地面平面;统计所述 深度相机平面与所述地面平面之间各个像素点相对于所述深度相机的深度后进行排序,得 到各个角度离障碍物的最小距离;将所述深度图像左右范围内的所有角度的像素点进行排 序,得到各个角度下各个像素列所对应的最小障碍物距离;将深度相机数据转换为激光数 据;获取里程计数据,根据所述激光数据和所述里程计数据进行地图构建。 进一步地,所述方法还包括:使用ROS系统的导航包根据所述激光数据对机器人进 行导航。 进一步地,所述选取所述深度图像中位于深度相机平面以下的任意三个像素点构 建平面,获取平面的法向量并转化为单位向量的步骤实现方式为: 其中,Y1、Y2、Y3为选取的像素点;∧为叉乘运算,求向量的外积;T1为三个像素点组 成的平面的法向量;T为单位向量。 4 CN 111595328 A 说 明 书 2/6 页 进一步地,所述将深度相机数据转换为激光数据的步骤包括: 获取所述深度图像中各个像素列距离障碍物最小的像素点的相机坐标,并计算该 相机坐标对应的世界坐标; 计算所述世界坐标与相机坐标原点的夹角; 根据所述深度相机的视野范围计算所述世界坐标所对应的伪激光点的计数; 计算伪激光点到相机坐标原点的距离; 根据所述世界坐标与相机坐标原点的夹角、所述伪激光点的计数和所述伪激光点 到相机坐标原点的距离建立对应的激光数据。 进一步地,所述根据所述激光数据和所述里程计数据进行地图构建的步骤所使用 的算法为gmapping建图算法中的改进的Rao-Blackwellized粒子滤波算法。 第二方面,本申请实施例提供一种基于深度相机的真实障碍物地图构建和导航系 统,包括控制器,与所述控制器连接的深度相机;与所述控制器连接的里程计;所述深度相 机用于获取各个角度下的环境障碍物的深度图像;所述控制器用于平面构建模块、地面平 面分析模块、障碍物距离分析模块、数据转换模块和地图构建模块;所述平面构建模块用于 选取所述深度图像中位于深度相机平面以下的任意三个像素点构建平面,获取平面的法向 量并转化为单位向量;所述地面平面分析模块用于计算所述深度图像中每一个像素点与所 述单位向量的外积,获得与所述平面共面的像素点;分析所述深度图像中与所述平面共面 的像素点是否超过设置的阈值;若所述深度图像中与所述平面共面的像素点超过设置的阈 值,则将所述平面定义为地面平面;所述障碍物距离分析模块用于统计所述深度相机平面 与所述地面平面之间各个像素点相对于所述深度相机的深度后进行排序,得到各个角度离 障碍物的最小距离;将所述深度图像左右范围内的所有角度的像素点进行排序,得到各个 角度下各个像素列所对应的最小障碍物距离;所述数据转换模块用于将深度相机数据转换 为激光数据;所述地图构建模块用于获取里程计数据,根据所述激光数据和所述里程计数 据进行地图构建。 进一步地,所述控制器还包括导航模块,所述导航模块用于使用ROS系统的导航包 根据所述激光数据对机器人进行导航。 进一步地,所述系统还包括无线通信装置;所述无线通信装置用于建立机器人无 线通信网络。 本申请能够实现的有益效果是:本申请首先通过深度摄像机获取各个角度下的环 境障碍物的深度图像,其次,选取深度图像中位于深度相机平面以下的三个任意点构建平 面,获取平面的法向量并转换为单位向量;再次,计算深度图像中每一个像素点与单位向量 的外积获得与构建的平面共面的像素点,当与构建的平面共面的像素点的数量超过设置的 阈值时将该平面定义为地面平面;然后,统计深度相机平面与地面平面之间的各个像素点 相对于深度相机的深度后进行排序,得到各个角度障碍物的最小距离;再者,将深度图像左 右范围内的所有角度的像素点进行排序,得到各个角度下各个像素列所对应的最小障碍物 距离;最后,将深度相机数据转换为激光数据并结合获取到的里程计数据进行地图构建。通 过上述方式构建环境地图,解决了激光雷达传感器无法识别低处障碍物的问题,可以更为 准确地建立环境地图,使机器人运行更加安全。 5 CN 111595328 A 说 明 书 3/6 页 附图说明 为了更清楚地说明本申请实施例的技术方案,下面将对本申请实施例中所需要使 用的附图作简单地介绍,应当理解,以下附图仅示出了本申请的某些实施例,因此不应被看 作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以 根据这些附图获得其他相关的附图。 图1为现有激光雷达扫描障碍物的原理图; 图2为本申请实施例提供的一种基于深度相机的真实障碍物地图构建和导航方法 流程示意图; 图3为本申请实施例提供的一种基于深度相机的真实障碍物地图构建和导航系统 结构框图。 图标:10-真实障碍物地图构建和导航系统;100-控制器;110-平面构建模块;120- 地面平面分析模块;130-障碍物距离分析模块;140-数据转换模块;150-地图构建模块; 160-导航模块;200-深度相机;300-里程计;400-无线通信装置。











