
技术摘要:
本发明涉及一种基于CAN总线的舵鳍联合减摇控制方法及系统。所述方法包括获取所述船舶的舵鳍联合系统的线性数学模型;基于CAN总线,获取所述船舶的当前时刻的横摇角和航向角;根据所述舵鳍联合系统的线性数学模型,采用闭环增益成形算法确定所述船舶的舵鳍联合系统控制 全部
背景技术:
船舶在海上航行时,由于其存在不确定的风、浪和流的干扰,会对航行中的船舶造 成严重的影响。尤其是在船舶受到强烈的横摇干扰后,会引发一系列的影响船舶航行安全 的活动。剧烈的横摇运动会降低船舶的适航性,影响船载设备的正常运行,无法保证货物的 固定以及威胁到船员的正常生活。更严重的还会发生船舶倾覆的危险,造成巨大的财产损 失。对于军方来说,船舶的不规则的横摇运动不仅无法保障舰载飞机的高效安全的工作,而 且还会降低舰载火炮的命中率。其中,以横摇影响最为严重。舵鳍联合减摇是利用船上现有 的舵和操舵系统,与减摇鳍联合起来进行控制,其中减摇鳍起主要的减摇作用,而自动舵在 保持航向的同时,起到辅助的减摇作用,这种舵鳍联合控制,能对减摇鳍起到有力的补偿作 用,可以在保持航向控制精度的前提下大大提高系统的减摇能力,在提高整体减摇效果的 同时,还可以减小减摇鳍的动作和噪音,从而使船舶的适航性、安全性以及成员的舒适性得 到相应的提高。目前,舵鳍联合控制的研究一直是船舶减摇领域研究的热点内容。 目前在对舵鳍联合减摇系统的控制的过程中控制信号需同时输入到舵机和鳍机, 但是控制信号在传输的过程中会造成信号的延迟,且造成信号的串扰,信号的传输效率低, 不能保证舵机和鳍机的同时控制,造成舵鳍联合减摇的实时性和可靠性不高。
技术实现要素:
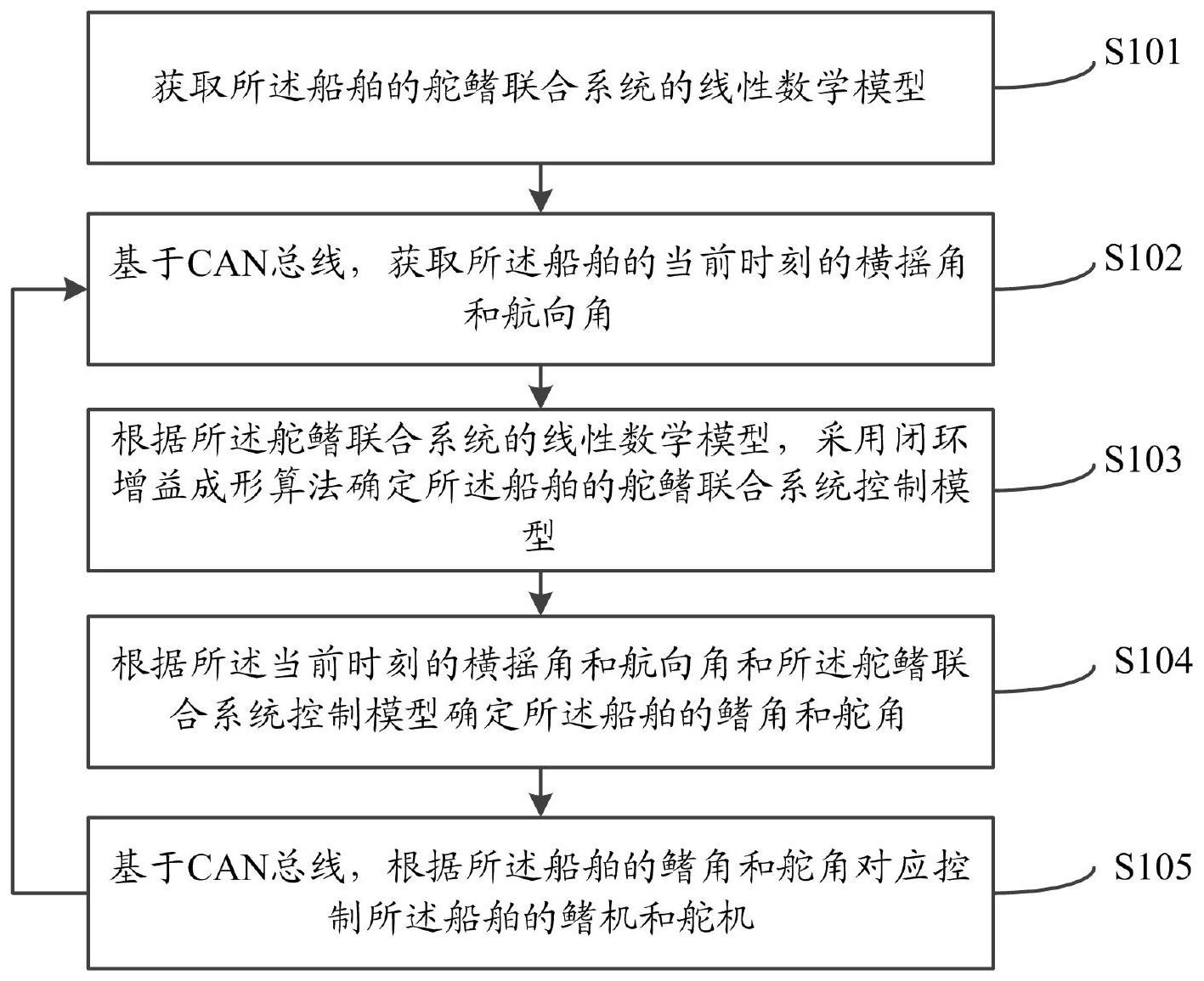
本发明的目的是提供一种基于CAN总线的舵鳍联合减摇控制方法及系统,提高舵 鳍联合减摇的实时性和可靠性。 为实现上述目的,本发明提供了如下方案: 一种基于CAN总线的舵鳍联合减摇控制方法,包括: 获取所述船舶的舵鳍联合系统的线性数学模型; 基于CAN总线,获取所述船舶的当前时刻的横摇角和航向角; 根据所述舵鳍联合系统的线性数学模型,采用闭环增益成形算法确定所述船舶的 舵鳍联合系统控制模型;所述舵鳍联合系统控制模型以所述横摇角和所述航向角为输入, 以鳍角和舵角为输出; 根据所述当前时刻的横摇角和航向角和所述舵鳍联合系统控制模型确定所述船 舶的鳍角和舵角; 基于CAN总线,根据所述船舶的鳍角和舵角对应控制所述船舶的鳍机和舵机;返回 所述基于CAN总线,获取所述船舶的当前时刻的横摇角和航向角的步骤。 可选的,所述获取所述船舶的舵鳍联合系统的线性数学模型,之前还包括: 4 CN 111552186 A 说 明 书 2/8 页 利用公式 确定所述船舶的舵鳍联合系统的线性数学 模型;其中,x1为横摇角速度,x2为艏摇角速度,x3为船舶的横摇角,x4为船舶的艏摇角,u1为 船舶的减摇鳍控制角,u2为船舶的舵控制角,y1、y2为所述线性数学模型的输出,a11、a12、a21、 b11、b12、b21和b22为所述线性数学模型的系数。 可选的,所述根据所述舵鳍联合系统的线性数学模型,采用闭环增益成形算法确 定所述船舶的舵鳍联合系统控制模型,具体包括: 利用公式 确定所述船舶的 舵鳍联合系统控制模型,其中,T11和T22为船舶的舵鳍联合系统控制模型的调节参数,s为拉 普拉斯算子。 可选的,所述船舶的舵鳍联合系统控制模型的补灵敏度函数为: 一种基于CAN总线的舵鳍联合减摇控制系统,包括: 线性数学模型获取模块,用于获取所述船舶的舵鳍联合系统的线性数学模型; 当前时刻姿态获取模块,用于基于CAN总线,获取所述船舶的当前时刻的横摇角和 航向角; 舵鳍联合系统控制模型确定模块,用于根据所述舵鳍联合系统的线性数学模型, 采用闭环增益成形算法确定所述船舶的舵鳍联合系统控制模型;所述舵鳍联合系统控制模 型以所述横摇角和所述航向角为输入,以鳍角和舵角为输出; 鳍角和舵角确定模块,用于根据所述当前时刻的横摇角和航向角和所述舵鳍联合 系统控制模型确定所述船舶的鳍角和舵角; 控制模块,用于基于CAN总线,根据所述船舶的鳍角和舵角对应控制所述船舶的鳍 机和舵机;返回所述基于CAN总线,获取所述船舶的当前时刻的横摇角和航向角的步骤。 可选的,还包括: 线性数学模型确定模块,用于利用公式 确定所述船舶 5 CN 111552186 A 说 明 书 3/8 页 的舵鳍联合系统的线性数学模型;其中,x1为横摇角速度,x2为艏摇角速度,x3为船舶的横摇 角,x4为船舶的艏摇角,u1为船舶的减摇鳍控制角,u2为船舶的舵控制角,y1、y2为所述线性数 学模型的输出,a11、a12、a21、b11、b12、b21和b22为所述线性数学模型的系数。 可选的,所述舵鳍联合系统控制模型确定模块具体包括: 舵鳍联合系统控制模型确定单元,用于利用公式 确定所述船舶的舵鳍联合系统控 制模型,其中,T11和T22为船舶的舵鳍联合系统控制模型的调节参数,s为拉普拉斯算子。 可选的,还包括: 补灵敏度函数确定模块,用于利用公式 确定补灵敏度函数。 根据本发明提供的具体实施例,本发明公开了以下技术效果: 本发明所提供的一种基于CAN总线的舵鳍联合减摇控制方法及系统,通过CAN总线 实时获取所述船舶的横摇角和航向角,并通过将实时的横摇角和航向角传输至舵鳍联合系 统控制模型确定模块,舵鳍联合系统控制模型确定模块输出所述船舶的鳍角和舵角,所述 船舶根据CAN总线接收所述鳍角和舵角,进而对船舶进行控制。通过CAN总线的双线并行传 输,避免了信号的串扰,提高了信号的传输效率,保证了舵机和鳍机的同时控制,提高了舵 鳍联合减摇的实时性和可靠性。 附图说明 为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所 需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施 例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图 获得其他的附图。 图1为本发明所提供的一种基于CAN总线的舵鳍联合减摇控制方法流程示意图; 图2为本发明所提供的一种基于CAN总线的舵鳍联合减摇控制系统结构示意图。











