
技术摘要:
本发明公开一种折叠臂及其3D打印制造方法,其中,折叠臂,包括:两个或两个以上折合模块,折合模块包括两个部件,两个部件的底边转动连接,两个部件沿开合轴线转动开合;所有折合模块依次连接,至少两个相邻折合模块的开合轴线的夹角小于180度;折合模块中的两个部件分 全部
背景技术:
目前,工业上使用的抓取用刚性机械臂通常采用多个刚性爪配合对目标物实现夹 持抓取,该刚性机械臂结构其刚性爪不能形变,因此对目标物的适应性差。而欠驱动机械臂 虽然可以适应目标物的外形,但是其自身结构复杂,具有制造、装配效率低的问题。
技术实现要素:
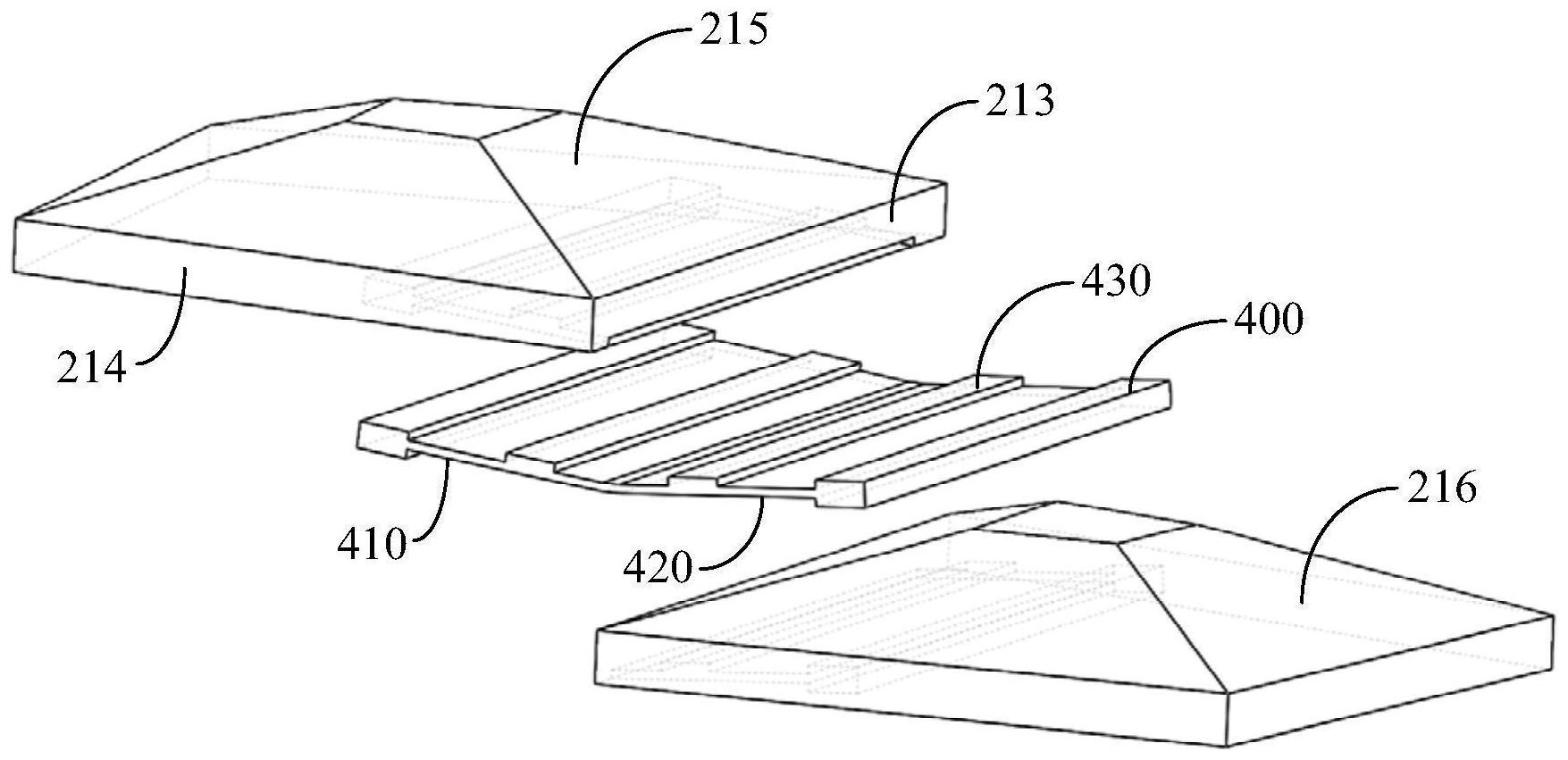
本发明的主要目的是提出一种折叠臂,旨在提供一种制造、装配效率高,对目标具 有自适应功能的折叠臂。 为实现上述目的,本发明提出的折叠臂,包括:两个或两个以上折合模块,所述折 合模块包括两个部件,两个所述部件的底边转动连接,两个所述部件沿开合轴线转动开合; 所有所述折合模块依次连接,至少两个相邻所述折合模块的所述开合轴线的夹角 小于180度; 所述折合模块中的两个所述部件分别为第一部件和第二部件;任意相邻的两个所 述第一部件转动连接,任意相邻的两个所述第二部件转动连接,以使任意相邻的两个所述 折合模块中,其中一个所述折合模块开合驱动另一所述折合模块开合; 所述折合模块整体3D打印一体成型;和/或, 所述折叠臂中两个或两个以上所述第一部件通过3D打印一体成型。 可选地,所述折合模块还包括柔性连接件,所述柔性连接件连接所述第一部件和 所述第二部件,以使所述第一部件和所述第二部件能够转动开合,所述第一部件、所述第二 部件以及所述柔性连接件通过3D打印一体成型;或者, 所述折叠臂还包括柔性连接件,相邻两个所述第一部件通过所述柔性连接件转动 连接,相邻两个所述第一部件与所述柔性连接件通过3D打印一体成型。 可选地,所述折合模块中,所述柔性连接件的第一部分嵌设在所述第一部件内,所 述柔性连接件的第二部分嵌设在所述第二部件内;或者, 相邻两个第一部件中,所述柔性连接件的第一部分嵌设于其中一个所述第一部件 内,所述柔性连接件的第二部分嵌设于另一个所述第一部件内。 可选地,所述柔性连接件的第一部分设有凸起和/或凹槽。 可选地,所述第一部分穿设所述第一部件的所述底边以嵌入所述第一部件内。 可选地,所述柔性连接件与所述第一部件的底边的连接处,邻近或者邻接所述第 一部件的内表面。 可选地,所述部件还具有与所述底边相对设置的顶边,所述第一部分由所述第一 部件的所述底边向所述顶边延伸,所述第一部分相对于所述第一部件的内表面倾斜设置。 可选地,其特征在于,所述柔性连接件与所述部件材质相同; 4 CN 111604938 A 说 明 书 2/9 页 所述柔性连接件与所述部件材质不同。 本发明还提出一种折叠臂的3D打印制造方法,所述折叠臂如上所述,所述3D打印 制造方法包括以下步骤: 建立所述折合模块在所述第一部件与第二部件展平状态下的第一数字模型; 将所述第一数字模型输入3D打印机中,以打印出所述折合模块; 装配多个所述折合模块得到所述折叠臂;或者, 所述3D打印制造方法包括以下步骤: 建立两个或两个以上所述第一部件依次连接状态下的第二数字模型,建立两个或 两个以上所述第二部件依次连接状态下的第三数字模型; 将所述第二数字模型输入3D打印机中,以打印出第一配件; 将所述第三数字模型输入3D打印机中,以打印出第二配件; 将所述第一配件中的第一部件与所述第二配件中的第二部件一一对应转动连接, 得到所述折叠臂;或者, 所述3D打印制造方法包括以下步骤: 建立所述折叠臂的第四数字模型,在所述第四数字模型中,所述折合模块处于闭 合状态; 将所述第四数字模块输入3D打印机中,以打印出所述折叠臂。 本发明技术方案采用多个折合模块组成,通过驱动其中任意一所述折合模块开口 既能够实现控制所述折叠臂的弯曲与伸展,因此,仅需要通过单一驱动源既能驱动所述折 叠臂对目标物的捕捉和释放。故而所述折叠臂在应用时不仅有利于简化驱动结构,还能有 效节约成本。另一方面,随着所述折合模块的开度变化,所述折叠臂的弯曲率也发生变化, 从而使得所述机械臂能够适应不同外形、不同外径的目标物,具有目标适用范围广的特点。 再者,本发明技术方案能够通过控制折合模块的数量,实现折叠臂对目标物的缠绕,有利于 提升对目标物的捕捉的稳定性和可靠性。另外,由于所述折叠臂在捕捉目标物时,所述折合 模块处于展开状态,所述折合模块呈弯折结构,具有强度高的特点,有利于提升所述折叠臂 的机械强度。再者,所述折合模块整体3D打印一体成型,能够有效减少所述折叠臂装配的工 序,提升所述折叠臂装配时的生产效率。 附图说明 为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现 有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本 发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以 根据这些附图示出的结构获得其他的附图。 图1至图3为本发明折叠臂一实施例的曲率依次增大的结构示意图; 图4为图1中折叠臂的两个折合模块在装配状态下的轴测视图; 图5为图4中两个折合模块在装配状态下的俯视图; 图6为图4中两个折合模块在拆分状态下的结构示意图; 图7为图4中两个折合模块的爆炸图; 图8为图1中折叠臂的折合模块在展平状态下的俯视图; 5 CN 111604938 A 说 明 书 3/9 页 图9为图7中折合模块的第一视角的轴测视图; 图10为图7中折合模块的第二视角的轴测视图; 图11为图7中折合模块的前视图; 图12为图7中折合模块第三视角的爆炸图; 图13为图7中折合模块第四视角的爆炸图; 图14为本发明捕捉装置一实施例的机构示意图; 图15为本发明折叠臂的3D打印制造方法一实施例的流程示意图; 图16为本发明折叠臂的3D打印制造方法另一实施例的流程示意图; 图17为本发明折叠臂的3D打印制造方法又一实施例的流程示意图。 附图标号说明: 标号 名称 标号 名称 100 折叠臂 200 折合模块 212 顶边 213 底边 214 侧边 215 第一部件 216 第二部件 217 内表面 300 驱动件 400 柔性连接件 410 第一部分 420 第二部分 430 凸起 本发明目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。











